Simscape™ Multibody™ обеспечивает различные типы измерения силы и крутящего момента. С помощью блоков соединения можно определить силы и моменты срабатывания, приводящие в действие отдельные примитивы соединения. Можно также определить суммарные силы и силы ограничения, действующие на все соединение.
В этом учебном пособии блок сварного соединения используется для определения изменяющихся во времени внутренних сил, которые удерживают тело вместе. Двухмаятниковая модель, smdoc_double_pendulum, предоставляет начальную точку для учебного пособия. Сведения о создании этой модели см. в разделе Моделирование кинематической цепи с разомкнутым контуром.
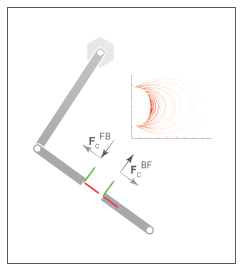
Соединяя блок сварного соединения между твердотельными элементами в подсистеме двоичных связей, можно определить силы зависимости, действующие между ними. На следующем рисунке показаны силы зависимости, определяемые в данном учебном пособии. Продольная сила зависимости выравнивается по оси X рамок сварного соединения. Сила поперечной зависимости выравнивается по оси Y. Сила зависимости вдоль оси Z ничтожна и поэтому игнорируется.

Блок Сварной шов (Weld Joint) позволяет воспринимать силу ограничения, оказываемую ведомым каркасом на базовую раму, или, в качестве альтернативы, силу ограничения, оказываемую базовым каркасом на ведомую раму. Две силы имеют одинаковую величину, но, как показано на схеме двоичной связи, противоположные направления. В этом учебном пособии рассматривается сила зависимости, оказываемая ведомым каркасом на базовый каркас.
Можно также выбрать рамку для разрешения измерения силы зависимости в. Рамкой разрешения может быть либо базовая рамка, либо рамка толкателя. Некоторые соединительные блоки позволяют их портовым кадрам иметь различную ориентацию, в результате чего одно и то же измерение различается в зависимости от выбранного вами кадра разрешения. Однако, поскольку блок сварного соединения обеспечивает нулевые степени свободы, оба кадра разрешения образуют одинаковые компоненты вектора силы зависимости.
В командной строке MATLAB ® введитеsmdoc_double_pendulum. Открывается двухмаятниковая модель.
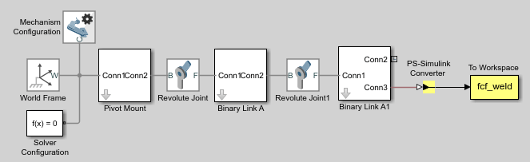
Щелкните стрелку Поиск внутри маски (Look Inside Mask) в блоке подсистемы Binary Link A1.
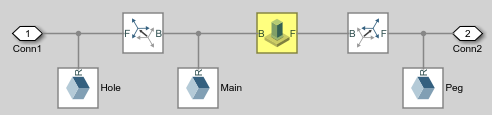
Перетащите блок сварного соединения из библиотеки «Simscape > Multi body > Joints».
Соедините блок сварного соединения, как показано на рисунке. Этот блок позволяет воспринимать силы зависимости, которые удерживают тело вместе во время движения. Поскольку он обеспечивает нулевые степени свободы между кадрами портов, он не влияет на динамику модели.
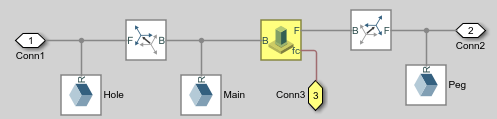
В диалоговом окне Блок сварного соединения (Weld Joint block) выберите Зависимость (Constraint) Сила (Force Блок открывает выходной порт физического сигнала с меткой fc.
Добавьте выходной порт Simscape в блок-схему подсистемы. Подключите блок, как показано на рисунке, и выйдите из вида подсистемы.
Перетащите следующие блоки в главное окно модели. Эти блоки позволяют выводить сигнал силы ограничения в рабочую область MATLAB.
| Библиотека | Блок |
|---|---|
| Simscape > Утилиты | Преобразователь PS-Simulink |
| Simulink > Раковины | К рабочему пространству |
Подключите блоки, как показано на рисунке. Убедитесь, что блок преобразователя PS-Simulink подключен к вновь добавленному порту Simscape.
Задайте эти параметры блока.
| Блок | Параметр диалогового окна | Стоимость |
|---|---|---|
| Преобразователь PS-Simulink | Блок выходного сигнала | mN |
| К рабочему пространству | Имя переменной | fcf_weld |
Единицы измерения mN подходят для этой модели, которая содержит алюминиевые звенья примерно 30 см × 2 см × 0,8 см.
В каждом диалоговом окне «Вращение блока соединения» выберите «Внутренняя механика» > «Коэффициент демпфирования» и введите 1e-5. Коэффициент демпфирования позволяет моделировать рассеяние энергии во время движения, так что модель с двойным маятником в конечном итоге приходит в упор.
На вкладке Моделирование (Modeling) щелкните Параметры модели (Model Settings).
На вкладке Решатель (Solver) окна Параметры конфигурации (Configuration Parameters) задайте для параметра Решатель (Solver) значение ode15s. Это рекомендуемый решатель для физических моделей.
На той же вкладке задайте для параметра Максимальный размер шага значение 0.001 s.
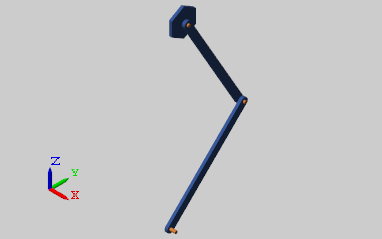
Запустите моделирование. Откроется Mechanics Explorer с динамическим видом модели. В строке меню Проводника Mechanics выберите кнопку Изометрический вид (Isometric View), чтобы просмотреть двойной маятник с изометрической перспективы.
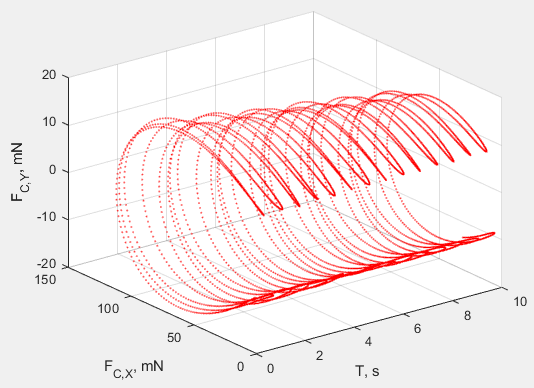
В командной строке MATLAB введите следующие команды печати:
figure;
plot3(fcf_weld.time, fcf_weld.data(:,1), fcf_weld.data(:,2),...
'.', 'MarkerSize', 1, 'Color', 'r');
grid on;
xlabel('T, s');
ylabel('F_{C,X}, mN');
zlabel('F_{C,Y}, mN');