Моделирование динамики трехфазной асинхронной машины, также известной как индукционная машина, в единицах СИ или пу
Simscape / Электрический / Специализированные Энергосистемы / Электрические Машины
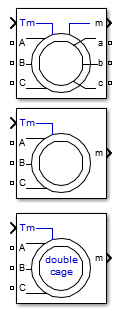
Блоки Asynchronous Machine SI Units и Asynchronous Machine pu Units реализуют трехфазную асинхронную машину (намотанный ротор, клетка с белкой или двойная клетка с белкой), смоделированную в выбираемой опорной системе dq (ротор, статор или синхронный). Обмотки статора и ротора соединены тросом с внутренней нейтральной точкой. Блок работает либо в генераторном, либо в моторном режиме. Режим работы диктуется признаком механического момента:
Если Tm положителен, машина действует как двигатель.
Если Tm отрицательный, машина действует как генератор.
Электрическая часть машины представлена моделью состояния-пространства четвёртого порядка (или шестого порядка для машины с двойным белым каркасом), а механическая часть - системой второго порядка. Все электрические переменные и параметры относятся к статору, который обозначается первичными знаками в следующих уравнениях машины. Все величины статора и ротора находятся в произвольной двухосной системе отсчета (dq frame). Используемые подстрочные индексы определены в этой таблице.
Нижний индекс | Определение |
|---|---|
d | Количество по оси d |
q | количество по оси q |
r | Количество ротора (намотанный ротор или одноконтактный) |
r1 | Количество ротора сепаратора 1 (двухконтактный) |
r2 | Количество ротора сепаратора 2 (двухконтактный) |
s | Количество статора |
l | Индуктивность утечки |
m | Намагничивающая индуктивность |
Vqs = Rsiqs + díqs/dt +
Vds = Rsids + d.ds/dt -
V 'qr = R' ri 'qr + d' qr/dt + (λ - λ r)
V 'dr = R' ri 'dr + dstart' dr/dt - (λ - startr)
Te = 1,5p (фдзики - фдзиды)
λ - Угловая скорость системы отсчета
startr - Электрическая угловая скорость
dwfqs = Lsiqs + Lmi 'qr
dwfds = Lsids + Lmi 'dr
start' qr = L 'ri' qr + Lmiqs
start' dr = L 'ri' dr + Lmids
Ls = Lls + Lm
L 'r = L' lr + Lm
Vqs = Rsiqs + díqs/dt +
Vds = Rsids + d.ds/dt -
0 = R 'r1i' qr1 + d
0 = R 'r1i' dr1 + dstart' dr1/dt - (λ -
0 = R 'r2i' qr2 + d
0 = R 'r2i' dr2 + d
Te = 1,5p (фдзики - фдзиды)
dwfqs = Lsiqs + Lm (i 'qr1 + i' qr2)
dwfds = Lsids + Lm (i 'dr1 + i' dr2)
start' qr1 = L 'r1i' qr1 + Lmiqs
start' dr1 = L 'r1i' dr1 + Lmids
start' qr2 = L 'r2i' qr2 + Lmiqs
start' dr2 = L 'r2i' dr2 + Lmids
Ls = Lls + Lm
L 'r1 = L' lr1 + Lm
L 'r2 = L' lr2 + Lm
ддтм м =
Параметры блока асинхронной машины определены в таблице. Все величины относятся к статору.
Параметры, общие для всех моделей | Определение |
|---|---|
Rs, Lls | Сопротивление статора и индуктивность утечки |
Lm | Намагничивающая индуктивность |
Ls | Полная индуктивность статора |
Vqs, iqs | напряжение и ток статора по оси q |
Vds, ids | Напряжение и ток статора d-оси |
ϕqs, ϕϕds | Потоки q-оси статора и d-оси |
ωm | Угловая скорость ротора |
Θm | Угловое положение ротора |
p | Количество пар полюсов |
ωr | Электрическая угловая скорость (startm × p) |
Θr | Угловое положение ротора электрооборудования (Startm × p) |
Те | Электромагнитный момент |
TM | Механический крутящий момент вала |
J | Комбинированный коэффициент инерции ротора и нагрузки. Для моделирования блокированного ротора установите значение «бесконечно». |
H | Комбинированный ротор и постоянная инерции нагрузки. Для моделирования блокированного ротора установите значение «бесконечно». |
F | Комбинированный коэффициент трения ротора и нагрузки |
Параметры, относящиеся к однооболочечному или намотанному ротору | Определение |
|---|---|
Л 'р | Суммарная индуктивность ротора |
R 'r, L' lr | Сопротивление ротора и индуктивность утечки |
V 'qr, i' qr | напряжение и ток ротора по оси q |
V 'dr, i' dr | напряжение и ток ротора по оси d |
«qr», «dr» | Потоки по оси q и оси d ротора |
Параметры, характерные для двухконтажного ротора | Определение |
|---|---|
R 'r1, L' lr1 | Сопротивление ротора и индуктивность утечки обоймы 1 |
R 'r2, L' lr2 | Сопротивление ротора и индуктивность утечки обоймы 2 |
L 'r1, L' r2 | Суммарные индуктивности ротора обоймы 1 и 2 |
i 'qr1, i' qr2 | q-осевой ток ротора обоймы 1 и 2 |
i 'dr1, i' dr2 | ток ротора d-оси сепаратора 1 и 2 |
«qr1», «dr1» | q-осевые и d-осевые потоки ротора сепаратора 1 |
«qr2», «dr2» | q-осевые и d-осевые потоки ротора сепаратора 2 |
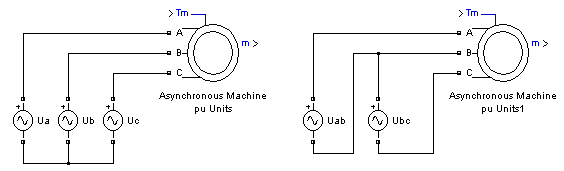
Блоки асинхронной машины не содержат представления насыщения потоков утечки. Будьте осторожны при подключении идеальных источников к статору машины. Если выбрана подача питания на статор через трехфазный, Y-подключенный источник бесконечного напряжения, необходимо использовать три источника, соединенных в Y. Однако, если выбрано моделирование дельта-подключения источника, необходимо использовать только два источника, соединенных последовательно.
При использовании блоков асинхронной машины в дискретных системах может потребоваться подключение небольшой паразитной резистивной нагрузки на клеммах машины, чтобы избежать цифровых колебаний. Большие времена выборки требуют больших нагрузок. Оптимальная резистивная нагрузка пропорциональна времени выборки. С шагом 25 мкс в системе с частотой 60 Гц минимальная нагрузка составляет приблизительно 2,5% номинальной мощности машины. Например, асинхронная машина 200 МВА в энергосистеме, дискретизированная с временем выборки 50 мкс, требует приблизительно 5% резистивной нагрузки или 10 МВт. Если время выборки уменьшено до 20 мкс, достаточна резистивная нагрузка 4 МВт.
Клеммы статора блоков асинхронной машины обозначены буквами A, B и C. Клеммы ротора обозначены буквами a, b и C. Нейтральные соединения обмоток статора и ротора недоступны. Предполагается трехпроводное Y-соединение.
Rotor type - Тип ротораWound | Squirrel-cage | Double squirrel-cageТип ротора. Для блока «Единицы СИ асинхронной машины» значением по умолчанию является Wound. Для блока Asynchronous Machine pu Units значением по умолчанию является Squirrel-cage.
Squirrel-cage preset model - Электрические и механические параметрыNo (по умолчанию) | 01: 5 HP 460 V 60Hz 1750 RPM | 02: 10 HP 460 V 60Hz 1760 RPM | ...Набор заданных электрических и механических параметров для различных асинхронных машин номинальной мощности (ВД), межфазного напряжения (В), частоты (Гц) и номинальной частоты вращения (об/мин) для одиночных беличьих машин.
Выберите одну из предустановленных моделей для загрузки соответствующих электрических и механических параметров. Предустановленные модели не включают заранее заданные параметры насыщения. Возможны следующие варианты:
01: 5 HP 460 V 60Hz 1750 RPM
02: 10 HP 460 V 60Hz 1760 RPM
03: 20 HP 460 V 60Hz 1760 RPM
04: 50 HP 460 V 60Hz 1780 RPM
05: 100 HP 460 V 60Hz 1780 RPM
06: 150 HP 460 V 60Hz 1785 RPM
07: 200 HP 460 V 60Hz 1785 RPM
08: 5 HP 575 V 60Hz 1750 RPM
09: 10 HP 575 V 60Hz 1760 RPM
10: 20 HP 575 V 60Hz 1765 RPM
11: 50 HP 575 V 60Hz 1775 RPM
12: 100 HP 575 V 60Hz 1780 RPM
13: 150 HP 575 V 60Hz 1785 RPM
14: 200 HP 575 V 60Hz 1785 RPM
15: 5.4 HP (4KW) 400 V 50Hz 1430 RPM
16: 10 HP (7.5KW) 400 V 50Hz 1440 RPM
17: 20 HP (15KW) 400 V 50Hz 1460 RPM
18: 50 HP (37KW) 400 V 50Hz 1480 RPM
19: 100 HP (75KW) 400 V 50Hz 1484 RPM
20: 150 HP (110KW) 400 V 50Hz 1487 RPM
21: 215 HP (160KW) 400 V 50Hz 1487 RPM
Выбрать No если вы не хотите использовать предустановленную модель или хотите изменить некоторые параметры предустановленной модели.
При выборе заданной модели электрические и механические параметры на вкладке Параметры (Parameters) становятся недоступными. Чтобы начать работу с предварительно заданной модели и затем изменить параметры машины, выполните следующие действия.
Выберите предустановленную модель, для которой требуется инициализировать параметры.
Измените значение параметра «Предустановленная модель» на No. Это действие не изменяет параметры машины, но разрывает соединение с предварительно установленной моделью.
Измените необходимые параметры машины.
Чтобы включить этот параметр, установите тип ротора в Squirrel-cage.
Double squirrel-cage preset model - предустановленные моделиНажмите кнопку Open parameter estimator, чтобы открыть интерфейс для power_AsynchronousMachineParams функция, предоставляющая доступ к предварительно заданным моделям для асинхронных машин с двойным корпусом.
Mechanical input - Механический вводTorque Tm (по умолчанию) | Speed w | Mechanical rotational portСледует ли представлять крутящий момент, приложенный к валу, или частоту вращения ротора в качестве входного сигнала блока Simulink ® или представлять вал машины с помощью Simscape™ вращательного механического порта.
Выбрать Torque Tm для задания входного крутящего момента в N.m или pu и и открытия порта Tm. Скорость машины определяется инерцией J машины (для машины СИ) или постоянной Н инерции (для машины pu) и разницей между приложенным механическим крутящим моментом Tm и внутренним электромагнитным крутящим моментом Te. Когда скорость положительная, сигнал положительного крутящего момента указывает режим двигателя, а отрицательный сигнал указывает режим генератора.
Выбрать Speed w для задания входного значения скорости в рад/с или в pu и отображения порта w. Скорость машины накладывается и механическая часть модели (инерция машины J) игнорируется. Использование скорости в качестве механического ввода позволяет моделировать механическую связь между двумя машинами.
Рисунок показывает, как моделировать жесткое соединение вала в двигателе-генераторе, когда крутящий момент трения игнорируется в машине 2. Выход скорости машины 1 (двигателя) соединен со входом скорости машины 2 (генератора), а выход электромагнитного крутящего момента машины 2 Te подается на вход механического крутящего момента Tm машины 1. Коэффициент Kw учитывает единицы скорости обеих машин (рад/с или пу) и передаточное число коробки передач w2/w1. Коэффициент KT учитывает единицы крутящего момента как машин (N.m или pu), так и номинальные параметры машин. Кроме того, поскольку инерция J2 игнорируется в машине 2, J2 относится к скорости машины 1 и должна быть добавлена к инерции машины 1 J1.
Выбрать Mechanical rotational port для открытия механического поворотного порта Simscape, S, который позволяет соединить вал машины с другими блоками Simscape, имеющими механические поворотные порты.
На рисунке показано, как подключить блок источника идеального крутящего момента из библиотеки Simscape к валу машины, чтобы представить машину в режиме двигателя или в режиме генератора, когда частота вращения ротора положительная.
Reference frame - Опорная рамка для преобразованияRotor (по умолчанию) | Stationary | SynchronousОпорный кадр, который используется для преобразования входных напряжений (abc опорный кадр) в опорный кадр dq, и выходных токов (dq опорный кадр) в опорный кадр abc. Выберите из следующих преобразований опорных рамок:
Rotor - Преобразование парка
Stationary - Трансформация Clarke или αβ
Synchronous
Следующие соотношения описывают преобразования опорного кадра abc-dq, применяемые к асинхронным напряжениям фазы-фазы машины.
3cosβ] [V 'abrV' bcr]
В предыдущих уравнениях Θ - угловое положение справочной структуры, в то время как β = θ - θr является различием между положением справочной структуры и положением (электрическим) из ротора. Поскольку обмотки машины соединены в трехпроводной конфигурации Y, гомополярный (0) компонент отсутствует. Эта конфигурация также оправдывает, что два входных напряжения «линия-линия» используются внутри модели вместо трех входных напряжений «линия-нейтраль». Следующие соотношения описывают преобразования опорного кадра dq-to-abc, применяемые к асинхронным фазным токам машины.
= − ias − ibsi 'cr = − i' ar 'i' i 'br
В таблице показаны значения, принятые в каждой опорной системе отсчёта, и значения β в каждой опорной системе отсчёта (Starte - положение синхронно вращающейся опорной системы отсчёта).
Опорная рамка | Θ | β |
|---|---|---|
Ротор | Θr | 0 |
Постоянный | 0 | − Startr |
Синхронный | Θe | Starte − Startr |
Выбор опорного кадра влияет на формы сигналов всех переменных dq. Это также влияет на скорость моделирования и в некоторых случаях на точность результатов. В [1] предлагаются следующие руководящие принципы:
Используйте стационарную систему отсчета, если напряжения статора являются несбалансированными или прерывистыми, а напряжения ротора - сбалансированными (или 0).
Используйте опорную рамку ротора, если напряжения ротора являются несбалансированными или прерывистыми, а напряжения статора - сбалансированными.
Если все напряжения сбалансированы и непрерывны, используйте стационарные или синхронные опорные кадры.
В следующих ситуациях параметр «Опорная рамка» не является редактируемым и устанавливается внутренне:
| Настройка блока powergui | Настройка асинхронного машинного блока | Параметр опорной рамки |
|---|---|---|
Для типа моделирования установлено значение Phasor или Discrete Phasor | — | Synchronous |
Для типа моделирования установлено значение Discrete и выбран параметр Автоматически обрабатывать дискретный решатель (Automatically handle Discrete solver) и Дополнительные (Advanced) настройки решателя блоков | — | Rotor |
Для типа моделирования установлено значение Discrete
| Для модели дискретного решателя установлено значение Trapezoidal robust или Backward Euler robust | Rotor |
Чтобы включить этот параметр, в блоке powergui установите для параметра Тип моделирования значение Continuous или Discrete и снимите флажок Автоматически обрабатывать дискретный решатель (Automatically handle Discrete solver) и Дополнительные (Advanced) настройки решателя блоков. Кроме того, на вкладке Дополнительно (Advanced) задайте для модели дискретного решателя значение Trapezoidal non iterative или Trapezoidal iterative (alg. loop).
Use signal names to identify bus labels - Как идентифицировать метки шиныoff (по умолчанию) | onЕсли этот флажок установлен, на выходе измерения используются имена сигналов для идентификации меток шины. Эта опция используется для приложений, для которых метки сигналов шины должны содержать только буквенно-цифровые символы.
Если флажок снят, на выходе измерения используется определение сигнала для идентификации меток шины. Метки содержат неальфанумерные символы, несовместимые с некоторыми приложениями Simulink.
Совет
Эта вкладка содержит электрические параметры машины. Для оценки электрических параметров двухконтурной асинхронной машины на основе стандартных спецификаций производителя используйте power_AsynchronousMachineParams функция.
Nominal power, voltage (line-line), and frequency [ Pn(VA),Vn(Vrms),fn(Hz) ] - Номинальная мощность, напряжение и частота[1.845e+04 400 50] (по умолчанию) | трехэлементный векторНоминальная кажущаяся мощность Pn (VA), среднеквадратичное напряжение Vn (V) и частота fn (Hz).
Vrotor/Vstator voltage ratio - Коэффициент напряжения1 (по умолчанию) | положительный скалярОтношение напряжения Vротора/Vстатора асинхронной машины с намотанным ротором при останове ротора. Этот параметр позволяет получить требуемое напряжение ротора без подключения трансформатора на клеммах ротора.
Чтобы включить этот параметр, на вкладке Конфигурация (Configuration) задайте для параметра Тип ротора (Rotor type) значение Wound.
Stator resistance and inductance[ Rs(ohm) Lls(H) ] - Сопротивление статора и индуктивность утечки[0.5968 0.0003495] (по умолчанию) | двухэлементный векторСопротивление статора Rs (Λ) и индуктивность утечки Lls (H).
Rotor resistance and inductance [ Rr'(ohm) Llr'(H) ] - Сопротивление ротора и индуктивность утечки[0.6258 0.005473] (по умолчанию) | двухэлементный векторСопротивление ротора Rr '(Λ) и индуктивность утечки Llr' (H) относятся к статору.
Чтобы включить этот параметр, на вкладке Конфигурация (Configuration) задайте для параметра Тип ротора (Rotor type) значение Wound или Squirrel-cage.
Cage 1 resistance and inductance [ Rr1' (ohm) Llr1' (H) ] - Сопротивление ротора и индуктивность утечки[0.4155 0.002066] (по умолчанию) | двухэлементный векторСопротивление ротора Rr1 '(Λ) и индуктивность утечки Llr1' (H) относятся к статору.
Чтобы включить этот параметр, на вкладке Конфигурация (Configuration) задайте для параметра Тип ротора (Rotor type) значение Double squirrel-cage.
Cage 2 resistance and inductance [ Rr2' (ohm) Llr2' (H) ] - Сопротивление ротора и индуктивность утечки[0.4168 0.0003495] (по умолчанию) | двухэлементный векторСопротивление ротора Rr2 '(Λ) и индуктивность утечки Llr2' (H) относятся к статору.
Чтобы включить этот параметр, на вкладке Конфигурация (Configuration) задайте для параметра Тип ротора (Rotor type) значение Double squirrel-cage.
Mutual inductance Lm (H) - Индуктивность намагничивания0.0354 (по умолчанию) | скалярНамагничивающая индуктивность Lm (H).
Inertia, friction factor, pole pairs [ J(kg.m^2) F(N.m.s) p() ] - Инерция, коэффициент трения, пары полюсов[0.05 0.005879 2] (по умолчанию) | трехэлементный векторКомбинированный коэффициент инерции машины и нагрузки J (kg.m2), комбинированный коэффициент трения вязкости F (N.m.s) и пары полюсов p. Момент трения Tf пропорционален частоте вращения ротора (Tf = F.λ). Tf выражается в N.m, F - в N.m.s и λ - в рад/с.
Initial conditions - Начальное проскальзывание s, электрический угол, величина тока статора, фазовые углы, величина тока ротора и фазовые углы[0 0 0 0 0 0 0 0] (по умолчанию) | восьмиэлементный векторНачальный проскальзывание s, электрический угол (градусы), величина тока статора (А) и фазовые углы (градусы):
[slip, th, ias, ibs, ics, phaseas, phasebs, phasecs]
Если для параметра Тип ротора (Rotor type) (на вкладке Конфигурация (Configuration)) установлено значение Woundможно также задать необязательные начальные значения для величины тока ротора (A) и фазовых углов (градусов):
[slip, th, ias, ibs, ics, phaseas, phasebs, phasecs, iar, ibr, icr, phasear, phasebr, phasecr]
Если для параметра Тип ротора (Rotor type) (на вкладке Конфигурация (Configuration)) установлено значение Squirrel-cageисходные условия можно вычислить с помощью инструмента «Поток нагрузки» (Load Flow) или инструмента «Инициализация станка» (Machine Initialization) в блоке powergui.
Simulate saturation - Имитация магнитного насыщенияoff (по умолчанию) | onИмитировать ли магнитное насыщение ротора и статорного утюга.
Установите этот флажок, чтобы предоставить матрицу параметров для моделирования насыщения.
Снимите этот флажок, чтобы не допустить насыщения модели в моделировании. В этом случае соотношение между током статора и напряжением статора является линейным.
[ i(Arms) ; v(VLL rms)] - Параметры кривой насыщения без нагрузки[14.03593122, 27.81365428, 53.79336849, 72.68890987, 97.98006896, 148.6815601, 215.7428561, 302.9841135, 428.7778367 ; 230, 322, 414, 460, 506, 552, 598, 644, 690] (по умолчанию) | матрицаПараметры кривой насыщения без нагрузки. Магнитное насыщение статора и роторного утюга (насыщение взаимного потока) моделируется кусочно-линейной зависимостью, определяющей точки кривой насыщения без нагрузки. Первая строка этой матрицы содержит значения токов статора. Второй ряд содержит значения соответствующих клеммных напряжений (напряжений статора). Первая точка (первый столбец матрицы) должна отличаться от [0,0]. Эта точка соответствует точке, где начинается эффект насыщения.
Щелкните Печать (Plot), чтобы просмотреть указанную кривую насыщения без нагрузки.
Чтобы включить этот параметр, выберите «Моделирование насыщения».
Совет
Эта вкладка содержит электрические параметры машины. Для оценки электрических параметров двухконтурной асинхронной машины на основе стандартных спецификаций производителя используйте power_AsynchronousMachineParams функция.
Nominal power, voltage (line-line), and frequency [ Pn(VA),Vn(Vrms),fn(Hz) ] - Номинальная мощность, напряжение и частота[3730 460 60] (по умолчанию) | трехэлементный векторНоминальная кажущаяся мощность Pn (VA), среднеквадратичное напряжение Vn (V) и частота fn (Hz).
Vrotor/Vstator voltage ratio - Коэффициент напряжения1 (по умолчанию) | положительный скалярОтношение напряжения Vротора/Vстатора асинхронной машины с намотанным ротором при останове ротора. Этот параметр позволяет получить требуемое напряжение ротора без подключения трансформатора на клеммах ротора.
Чтобы включить этот параметр, на вкладке Конфигурация (Configuration) задайте для параметра Тип ротора (Rotor type) значение Wound.
Stator resistance and inductance [ Rs,Lls ] (pu) - Сопротивление статора и индуктивность утечки[0.01965 0.0397] (по умолчанию) | двухэлементный векторСопротивление статора Rs (pu) и индуктивность утечки Ll (pu).
Rotor resistance and inductance [ Rr',Llr' ] (pu) - Сопротивление ротора и индуктивность утечки[0.01909 0.0397] (по умолчанию) | двухэлементный векторСопротивление ротора Rr '(pu) и индуктивность утечки Llr' (pu) относятся к статору.
Чтобы включить этот параметр, на вкладке Конфигурация (Configuration) задайте для параметра Тип ротора (Rotor type) значение Wound или Squirrel-cage.
Cage 1 resistance and inductance [ Rr1',Llr1' ] (pu) - Сопротивление ротора и индуктивность утечки[0.01909 0.0397] (по умолчанию) | двухэлементный векторСопротивление ротора Rr1 '(pu) и индуктивность утечки Llr1' (pu) относятся к статору.
Чтобы включить этот параметр, на вкладке Конфигурация (Configuration) задайте для параметра Тип ротора (Rotor type) значение Double squirrel-cage.
Cage 2 resistance and inductance [ Rr2',Llr2' ] (pu) - Сопротивление ротора и индуктивность утечки[0.01909 0.0397] (по умолчанию) | двухэлементный векторСопротивление ротора Rr2 '(pu) и индуктивность утечки Llr2' (pu) относятся к статору.
Чтобы включить этот параметр, на вкладке Конфигурация (Configuration) задайте для параметра Тип ротора (Rotor type) значение Double squirrel-cage.
Mutual inductance Lm (pu) - Индуктивность намагничивания1.354 (по умолчанию) | скалярНамагничивающая индуктивность Lm (pu).
Inertia constant, friction factor, pole pairs [ H(s) F(pu) p() ] - постоянная инерции, коэффициент трения, пары полюсов[0.09526 0.05479 2] (по умолчанию) | трехэлементный векторПостоянная инерции H (s), комбинированный коэффициент трения F (pu) и пары полюсов p.
Initial conditions - Начальное проскальзывание s, электрический угол, величина тока статора, фазовые углы, величина тока ротора и фазовые углы[ 1,0 0,0,0 0,0,0 ] (по умолчанию) | восьмиэлементный векторНачальный проскальзывание s, электрический угол (градусы), величина тока статора (pu) и фазовые углы (градусы):
[slip, th, ias, ibs, ics, phaseas, phasebs, phasecs]
Если для параметра Тип ротора (Rotor type) (на вкладке Конфигурация (Configuration)) установлено значение Wound, можно также указать необязательные начальные значения для величины тока ротора (pu) и фазовых углов (градусов):
[slip, th, ias, ibs, ics, phaseas, phasebs, phasecs, iar, ibr, icr, phasear, phasebr, phasecr]
Если для параметра Тип ротора (Rotor type) (на вкладке Конфигурация (Configuration)) установлено значение Squirrel-cageисходные условия можно вычислить с помощью инструмента «Поток нагрузки» (Load Flow) или инструмента «Инициализация станка» (Machine Initialization) в блоке powergui.
Simulate saturation - Имитация магнитного насыщенияoff (по умолчанию) | onИмитировать ли магнитное насыщение ротора и статорного утюга.
Установите этот флажок, чтобы предоставить матрицу параметров для моделирования насыщения.
Снимите этот флажок, чтобы не допустить насыщения модели в моделировании. В этом случае соотношение между током статора и напряжением статора является линейным.
[ i; v] (pu) - Параметры кривой насыщения без нагрузки[0.212,0.4201,0.8125,1.0979,1.4799,2.2457,3.2586,4.5763,6.4763 ; 0.5,0.7,0.9,1,1.1,1.2 ,1.3,1.4,1.5] (по умолчанию) | матрицаПараметры кривой насыщения без нагрузки. Магнитное насыщение статора и роторного утюга (насыщение взаимного потока) моделируется кусочно-линейной зависимостью, определяющей точки кривой насыщения без нагрузки. Первая строка этой матрицы содержит значения токов статора. Второй ряд содержит значения соответствующих клеммных напряжений (напряжений статора). Первая точка (первый столбец матрицы) должна отличаться от [0,0]. Эта точка соответствует точке, где начинается эффект насыщения.
Щелкните Печать (Plot), чтобы просмотреть указанную кривую насыщения без нагрузки.
Чтобы включить этот параметр, выберите «Моделирование насыщения».
Чтобы включить вкладку Дополнительно (Advanced), в блоке powergui установите для параметра Тип моделирования (Simulation type) значение Discrete и снимите флажок Автоматически обрабатывать дискретный решатель (Automatically handle Discrete solver) и Дополнительные (Advanced) настройки решателя блоков.
Sample time (-1 for inherited) - Время отбора проб для блока-1 (по умолчанию) | скалярВремя выборки, используемое блоком. Чтобы наследовать время выборки, указанное в блоке powergui, установите для этого параметра значение –1.
Discrete solver model - Метод интеграцииTrapezoidal non iterative (по умолчанию) | Trapezoidal iterative (alg. loop) | Trapezoidal robust | Backward Euler robustМетод интеграции, используемый блоком, если для параметра типа Solver блока powergui установлено значение Discrete.
Для модели дискретного решателя автоматически устанавливается значение Trapezoidal robust при выборе параметров Автоматически обрабатывать дискретный решатель и Дополнительные настройки решателя блоков блока powergui.
Trapezoidal non iterative и Trapezoidal iterative (alg. loop) методы больше не рекомендуются для дискретизации блоков асинхронной машины. Trapezoidal non iterative требуется добавить незначительную шунтирующую нагрузку на клеммы станка, чтобы гарантировать стабильность моделирования, и Trapezoidal iterative (alg. loop) может не сойтись и вызвать остановку моделирования при увеличении количества машин в модели.
Trapezoidal robust и Backward Euler robust методы позволяют исключить необходимость использования паразитных нагрузок и моделировать машину без нагрузок. Для исключения топологических ошибок машин, подключенных к индуктивной цепи (например, автоматический выключатель, соединенный последовательно с машиной), машина моделирует ничтожную внутреннюю нагрузку 0,01% номинальной мощности.
Trapezoidal robust метод несколько точнее, чем Backward Euler robust способ, особенно когда модель моделируется в большие времена выборки. Trapezoidal robust способ может производить небольшие демпфированные числовые колебания на напряжении машины в условиях холостого хода, а Backward Euler robust способ предотвращает колебания и поддерживает хорошую точность.
Дополнительные сведения о том, какой метод следует использовать в приложении, см. в разделе Моделирование дискретизированных электрических систем.
Параметр на этой вкладке используется инструментом Load Flow блока powergui. Этот параметр потока нагрузки используется только для инициализации модели. Это не влияет ни на модель блока, ни на производительность моделирования.
Mechanical power (W) - Механическая мощность, подаваемая на вал машиныМеханическая мощность, приложенная к валу машины, в ваттах. Когда машина работает в режиме двигателя, укажите положительное значение. Когда машина работает в режиме генератора, укажите отрицательное значение.
Для блока «Единицы СИ асинхронной машины» значением по умолчанию является 1.492e+006. Для блока Asynchronous Machine pu Units значением по умолчанию является 0.
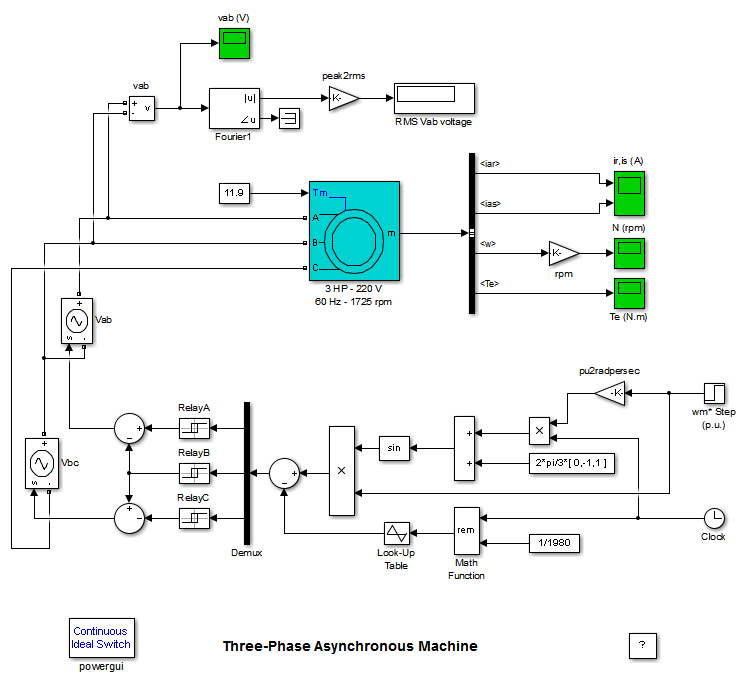
power_pwm В примере используется блок асинхронной машины в режиме двигателя. Пример состоит из асинхронной машины в системе управления скоростью с разомкнутым контуром.
Ротор машины имеет короткое замыкание, а статор питается ШИМ-инвертором, построенным из блоков Simulink и сопряженным с блоком асинхронной машины через блок источника управляемого напряжения. Инвертор использует синусоидальную широтно-импульсную модуляцию. Базовую частоту синусоидальной опорной волны устанавливают на 60 Гц, а частоту треугольной несущей - на 1980 Гц. Эта частота соответствует коэффициенту модуляции частоты mf 33 (60 Гц x 33 = 1980).
Машина 3 ВД подключена к постоянной нагрузке номинального значения (11,9 Н· м). Запускается и достигает заданной скорости 1,0 pu при t = 0,9 секунды.
Параметры машины такие же, как и у блока асинхронной машины SI, за исключением индуктивности утечки статора, которая установлена в два раза выше нормального значения для моделирования сглаживающего индуктора, размещенного между инвертором и машиной. Также для получения показанных результатов использовали стационарный опорный кадр.
Откройте окно power_pwm пример. В параметрах моделирования требуется небольшой относительный допуск из-за высокой скорости переключения инвертора.
Выполните моделирование и проверьте скорость и крутящий момент машины.
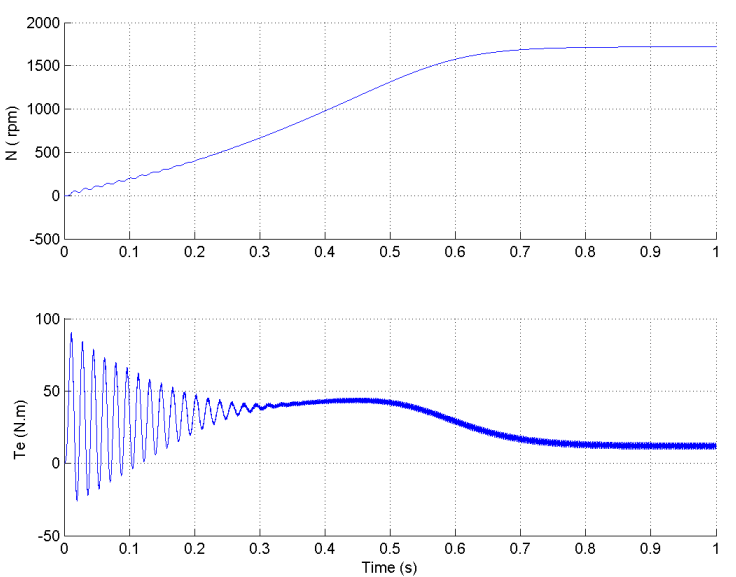
Первый график показывает скорость машины от 0 до 1725 об/мин (1,0 pu). На втором графике показан электромагнитный крутящий момент, создаваемый машиной. Поскольку статор питается ШИМ-инвертором, наблюдается шумный крутящий момент.
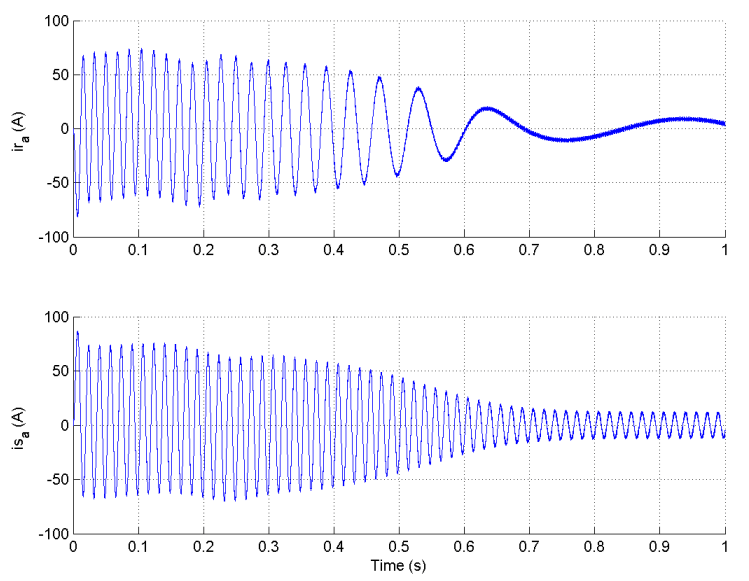
Однако этот шум не виден в скорости, потому что он отфильтрован инерцией машины, но его можно видеть в токах статора и ротора.
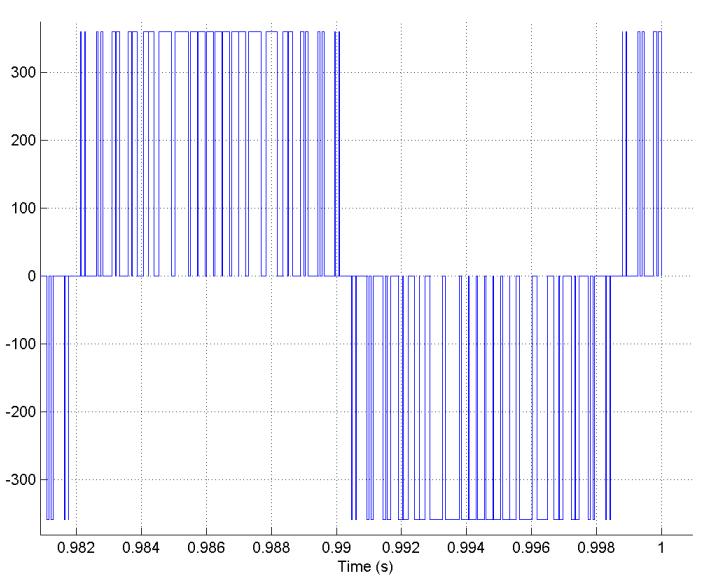
Посмотрите на выходной сигнал ШИМ-инвертора. Поскольку на шкале времени моделирования ничего интересного не видно, график концентрируется на последних моментах моделирования.
power_asm_sat пример иллюстрирует эффект насыщения блока асинхронной машины.
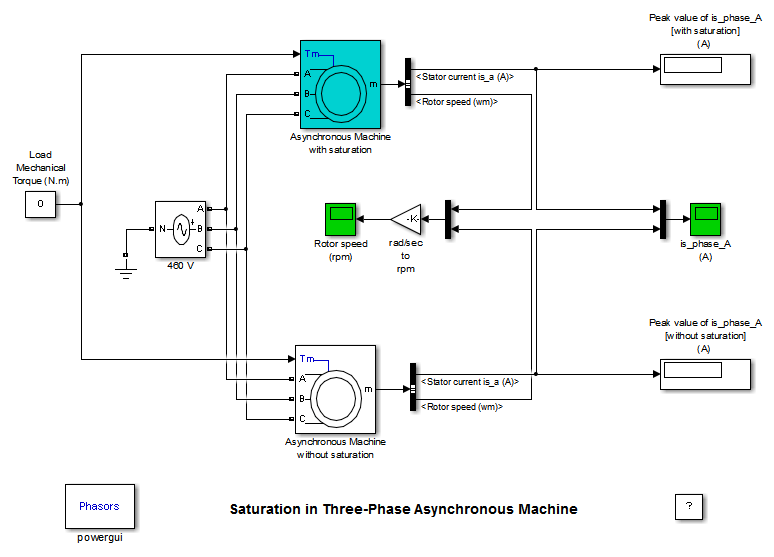
Два одинаковых трехфазных двигателя (50 л.с., 460 В и 1800 об/мин) моделируются с насыщением и без него для наблюдения воздействия насыщения на токи статора. В примере реализованы два различных моделирования.
Первое моделирование - это стационарное испытание без нагрузки. Эта таблица содержит значения параметров насыщения и измерений, полученных путем моделирования различных рабочих точек на насыщенном двигателе (без нагрузки и в установившемся состоянии).
Параметры насыщения | Измерения | ||
|---|---|---|---|
Всат (Vrms L-L) | Изат (пик А) | Vrms L-L | Is_A (пик А) |
- | - | 120 | 7.322 |
230 | 14.04 | 230 | 14.03 |
- | - | 250 | 16.86 |
- | - | 300 | 24.04 |
322 | 27.81 | 322 | 28.39 |
- | - | 351 | 35.22 |
- | - | 382 | 43.83 |
414 | 53.79 | 414 | 54.21 |
- | - | 426 | 58.58 |
- | - | 449 | 67.94 |
460 | 72.69 | 460 | 73.01 |
- | - | 472 | 79.12 |
- | - | 488 | 88.43 |
506 | 97.98 | 506 | 100.9 |
- | - | 519 | 111.6 |
- | - | 535 | 126.9 |
- | - | 546 | 139.1 |
552 | 148.68 | 552 | 146.3 |
- | - | 569 | 169.1 |
- | - | 581 | 187.4 |
598 | 215.74 | 598 | 216.5 |
- | - | 620 | 259.6 |
- | - | 633 | 287.8 |
644 | 302.98 | 644 | 313.2 |
- | - | 659 | 350 |
- | - | 672 | 383.7 |
- | - | 681 | 407.9 |
690 | 428.78 | 690 | 432.9 |
Следующий график иллюстрирует эти результаты и показывает точность модели насыщения. Измеренные рабочие точки соответствуют кривой, построенной на основе данных параметров насыщения.
Можно наблюдать другие эффекты насыщения токов статора, выполняя моделирование с заблокированным ротором или с различными значениями крутящего момента нагрузки.
[1] Краузе, П.К., О. Васынчук и С.Д. Sudhoff, Анализ электрических машин, IEEE ® Press, 2002.
[2] Мохан, Н., Т. М. Унделанд и В. П. Роббинс, Power Electronics: Converters, Applications, and Design, John Wiley & Sons, Inc., Нью-Йорк, 1995 год, раздел 8.4.1.
