Реализовать машину постоянного тока с намотанным полем или постоянным магнитом
Simscape / Электрический / Специализированные Энергосистемы / Электрические Машины
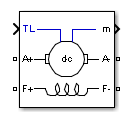
Блок DC Machine реализует машину с намотанным полем или постоянным магнитом DC.
Для машины постоянного тока с намотанным полем обеспечивается доступ к полевым терминалам (F +, F −), так что модель машины может использоваться в качестве машины постоянного тока с шунтированным или последовательным подключением. Крутящий момент, приложенный к валу, обеспечивается на входе Simulink ® TL.
Якорная цепь (A +, A −) состоит из индуктора La и резистора Ra последовательно с противоэлектродвижущей силой (CEMF) E.
CEMF пропорционален скорости машины.
E = КЭом
KE - это постоянная напряжения, λ - скорость машины.
В отдельно возбуждаемой модели машины постоянного тока постоянная KE напряжения пропорциональна току поля If:
KE = LafIf,
Laf - взаимная индуктивность якоря поля.
Электромеханический крутящий момент, создаваемый машиной постоянного тока, пропорционален току якоря Ia.
Te = KTIa,
KT - постоянная крутящего момента. Соглашение о подписании для Te и TL:
Te, TL > 0: Режим двигателя
Te, TL < 0: Режим генератора
Постоянная крутящего момента равна постоянной напряжения.
KT = KE.
Якорная цепь подключается между портами A + и A − блока DC Machine. Она представлена последовательным ответвлением Ra La последовательно с источником управляемого напряжения и блоком измерения тока.
В модели машины постоянного тока с намотанным полем схема поля представлена схемой RL. Он подключен между портами F + и F − блока DC Machine.
В модели машины постоянного тока с постоянным магнитом ток поля отсутствует, поскольку поток возбуждения устанавливается магнитами. KE и KT являются константами.
Механическая часть вычисляет скорость машины постоянного тока по чистому крутящему моменту, приложенному к ротору. Скорость используется для реализации напряжения E CEMF якорной цепи.
Механическая часть реализует это уравнение:
Bmλ − Tf,
J = инерция, Bm = коэффициент трения и Tf = крутящий момент трения Кулона.
Обеспечивает набор заданных электрических и механических параметров для различных номинальных значений мощности машины постоянного тока (ВД), напряжения постоянного тока (В), номинальной скорости (об/мин) и напряжения поля (В).
Предустановленные модели доступны только для модели машины постоянного тока с намотанным полем.
Выберите одну из стандартных моделей для загрузки соответствующих электрических и механических параметров в записи диалогового окна. Выбрать No (по умолчанию), если вы не хотите использовать предустановленную модель или если вы хотите изменить некоторые параметры предустановленной модели.
При выборе предварительно заданной модели электрические и механические параметры на вкладке Параметры (Parameters) диалогового окна становятся неизменяемыми (недоступны). Чтобы начать с заданной модели и затем изменить параметры машины, выполните следующие действия.
Выберите предустановленную модель, для которой требуется инициализировать параметры.
Измените значение параметра «Предустановленная модель» на No. Это не изменяет параметры машины. Таким образом разрывается соединение с определенной предварительно заданной моделью.
Измените необходимые параметры машины и нажмите кнопку Применить.
Выберите крутящий момент, приложенный к валу или частоте вращения ротора, в качестве входа Simulink блока или представьте вал машины с помощью Simscape™ вращательного механического порта.
Выбрать Torque TL (по умолчанию), чтобы задать ввод крутящего момента в N.m и изменить маркировку ввода блока на TL. Скорость машины определяется инерцией J машины и разностью между приложенным крутящим моментом TL механической нагрузки и внутренним электромагнитным крутящим моментом Те. Условное обозначение механического крутящего момента: при положительной скорости сигнал положительного крутящего момента указывает на режим работы двигателя, а отрицательный сигнал - на режим работы генератора.
Выбрать Speed w для задания ввода скорости, в рад/с, и изменения метки ввода блока на w. Скорость машины накладывается, а механическая часть модели (Инерция J) игнорируется. Использование скорости в качестве механического ввода позволяет моделировать механическую связь между двумя машинами.
На следующем рисунке показано, как моделировать жесткое соединение вала в электродвигателе-генераторе. Выход скорости машины 1 (двигателя) соединен с входом скорости машины 2 (генератора), а выход электромагнитного крутящего момента Те машины 2 приложен к входу крутящего момента механической нагрузки ТЛ машины 1. Коэффициент Kw учитывает единицы скорости как машин (рад/с), так и передаточное число коробки передач. Коэффициент KT учитывает единицы крутящего момента как машин (N.m), так и номинальных параметров машин. Кроме того, поскольку инерционный J2 игнорируется в машине 2, J2, упоминаемая скорость машины 1, должна быть добавлена к инерционному J1 машины 1.
Выбрать Mechanical rotational port для добавления к блоку механического поворотного порта Simscape, который позволяет соединять вал машины с другими блоками Simscape, имеющими механические поворотные порты. Вход Simulink, представляющий механический крутящий момент TL или скорость w машины, затем удаляется из блока.
На следующем рисунке показано, как подключить блок источника идеального крутящего момента из библиотеки Simscape к валу машины, чтобы представить машину в режиме двигателя или в режиме генератора, когда частота вращения ротора положительная.
Выберите между полем намотки и машиной постоянного тока с постоянным магнитом. Варианты: Wound (по умолчанию) и Permanent magnet.
Если этот флажок установлен, на выходе измерения используются имена сигналов для идентификации меток шины. Эта опция используется для приложений, для которых метка сигнала шины должна содержать только буквенно-цифровые символы.
Если флажок снят (по умолчанию), на выходе измерения используется определение сигнала для идентификации меток шины. Метки содержат неальфанумерные символы, несовместимые с некоторыми приложениями Simulink.
Сопротивление якоря Ra, в омах, и индуктивность якоря La, в хенриях. По умолчанию: [ 0.6 0.012].
Сопротивление поля Rf в омах и индуктивность поля Lf в хенриях. Этот параметр отображается только в том случае, если для параметра Field type на вкладке Configuration установлено значение Wound. По умолчанию: [ 240 120].
Взаимная индуктивность якоря поля, в хенриях. Этот параметр отображается только в том случае, если для параметра Field type на вкладке Configuration установлено значение Wound. По умолчанию: 1.8.
Для машины постоянного тока с постоянным магнитом выберите константу машины, которую необходимо задать для параметризации блока. Значения: Torque constant (по умолчанию) и Back-emf constant. Этот параметр отображается только в том случае, если для параметра Field type на вкладке Configuration установлено значение Permanent magnet.
Крутящий момент на постоянную тока машины постоянного тока в Н.м/А. Этот параметр отображается только в том случае, если для параметра Field type на вкладке Configuration установлено значение Permanent magnet и параметр Specify выше имеет значение Torque constant. По умолчанию: 1.8.
Постоянное напряжение на скорость машины постоянного тока постоянного магнита, в В/об/мин. Этот параметр отображается только в том случае, если для параметра Field type на вкладке Configuration установлено значение Permanent magnet и параметр Specify выше имеет значение Back-emf constant. По умолчанию: 1.8.
Общая инерция машины постоянного тока, в кг.м2. По умолчанию: 1.
Суммарный коэффициент трения машины постоянного тока, в Н.м.с. По умолчанию: 0.
Общая постоянная крутящего момента кулона машины постоянного тока в Н.М. По умолчанию 0.
Задает начальную скорость для машины постоянного тока в рад/с, чтобы начать моделирование с определенной начальной скоростью. Чтобы начать моделирование в установившемся состоянии, начальное значение входного сигнала TL крутящего момента должно быть пропорционально начальной скорости. По умолчанию: 1.
Указывает время выборки, используемое блоком. Чтобы наследовать время выборки, указанное в блоке Powergui, задайте для этого параметра значение −1 (по умолчанию).
TLВходным сигналом блока является момент механической нагрузки, в н.м.
wАльтернативным входом блока (в зависимости от значения параметра Mechanical input) является скорость машины в рад/с.
mВыходной сигнал блока представляет собой вектор, содержащий измерительные сигналы. Демультиплексировать эти сигналы можно с помощью блока выбора шины, предоставленного в библиотеке Simulink.
Имя | Определение | Единицы |
|---|---|---|
w | Скорость wm | рад/с |
iA | Ток якоря ia | A |
если | Ток поля, если | A |
Те | Электрический крутящий момент Te | N.m |
power_dcmotor Пример иллюстрирует запуск машины 5 HP 240-V DC с трехступенчатым стартером сопротивления.
[1] Анализ электрических машин, Краузе и др., стр. 89-92.
Асинхронная машина, Синхронная машина SI Основной, Синхронная машина pu Основной, Синхронная машина pu Стандарт
