Модель гидравлической турбины и пропорционально-интегральной (PID) системы регулирования
Simscape/Electrical/Специализированные силовые системы/Электрические машины/Синхронное управление машиной
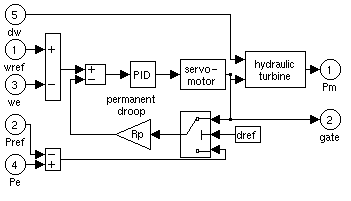
Блок гидравлической турбины и регулятора реализует нелинейную модель гидравлической турбины, систему регулятора PID и сервомотор [1].
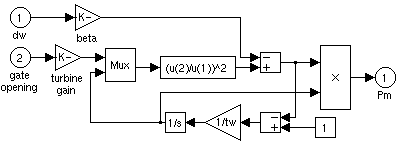
Гидравлическая турбина моделируется следующей нелинейной системой.
Сервомотор затвора моделируется системой второго порядка.
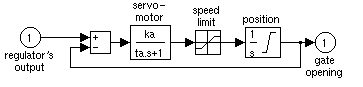
Коэффициент усиления Ka и постоянная времени Ta в секундах системы первого порядка, представляющей серводвигатель. По умолчанию: [ 10/3 0.07 ].
Ограничения gmin и gmax (pu), наложенные на открытие ворот, и vgmin и vgmax (pu/s), наложенные на скорость ворот. По умолчанию: [ 0.01 0.97518 -0.1 0.1 ].
Статический коэффициент усиления регулятора равен обратному значению постоянного падения Rp в контуре обратной связи. PID регулятор имеет пропорциональное усиление Kp, интегральное усиление Ki и производное усиление Kd. Высокочастотное усиление PID ограничено фильтром нижних частот первого порядка с постоянной времени Td (s). По умолчанию: [ 0.05 1.163 0.105 0 0.01 ].
Коэффициент затухания отклонения скорости β и время начала воды Tw (s). По умолчанию: [ 0 2.67 ].
Задает вход контура обратной связи: положение затвора (значение 1) или отклонение электрической мощности (значение 0). По умолчанию: 0.
Начальная механическая мощность Pm0 (pu) на валу машины. Это значение автоматически обновляется утилитой load flow блока Powergui. По умолчанию: 0.7516.
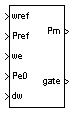
wrefОпорная скорость, в пу.
PrefОпорная механическая мощность в pu. Этот вход можно оставить неподключенным, если вы хотите использовать положение затвора в качестве входа в контур обратной связи вместо отклонения мощности.
weФактическая скорость машины, в пу.
Pe0Фактическая электрическая мощность машины в pu. Этот вход можно оставить неподключенным, если вы хотите использовать положение затвора в качестве входа в контур обратной связи вместо отклонения мощности.
dwОтклонение скорости, в пу.
PmМеханическая мощность PM для блока синхронной машины, в pu.
gateОткрытие ворот, в пу.
power_turbine пример иллюстрирует использование синхронной машины, связанной с блоками гидравлической турбины и регулятора (HTG) и системы возбуждения.
[1] Рабочая группа IEEE по моделям первичных двигателей и энергоснабжения для динамических исследований рабочих характеристик систем, «Модели гидравлических турбин и управления турбинами для динамических исследований», Транзакции IEEE ® по энергетическим системам, том 7, № 1, февраль 1992 г., стр. 167-179.
Система возбуждения, паровая турбина и регулятор, синхронная машина SI основной, синхронная машина pu основной, синхронная машина pu стандарт
