Логика коммутации для бесщеточных электродвигателей постоянного тока
Simscape / Электрический / Контроль / Контроль BLDC
Блок логики коммутации BLDC реализует логику коммутации для бесщеточных двигателей постоянного тока как часть этого алгоритма управления.
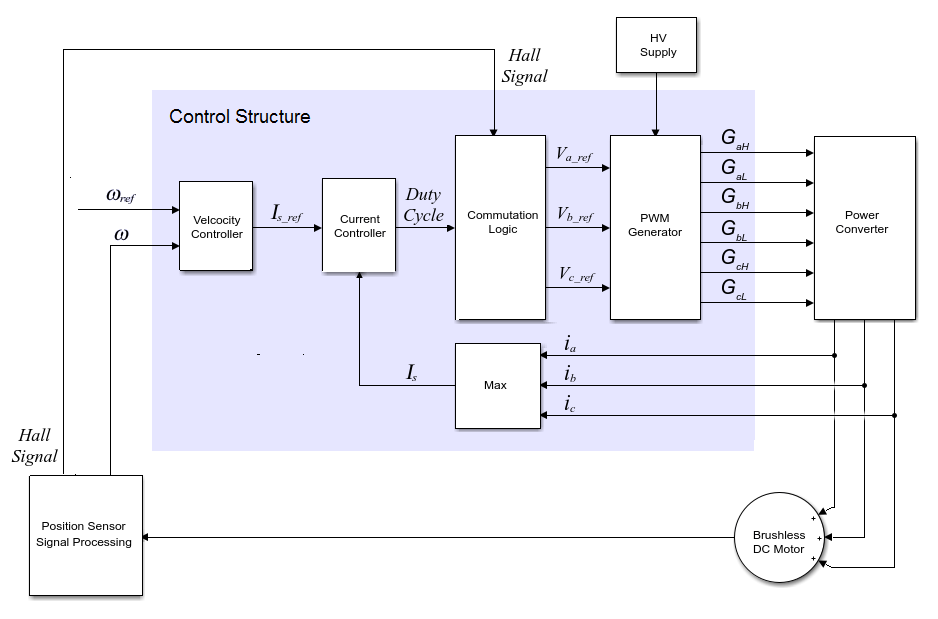
Логика коммутации основана на сигналах Холла, суммированных в этой таблице.
| Датчики Холла | Фазы двигателя | ||||
|---|---|---|---|---|---|
| Зал а | Зал b | Зал c | Фаза a | Фаза b | Фаза c |
| 0 | 0 | 0 | 0 | 0 | 0 |
| 1 | 1 | 0 | 0 | 1 | -1 |
| 0 | 1 | 0 | -1 | 1 | 0 |
| 0 | 1 | 1 | -1 | 0 | 1 |
| 0 | 0 | 1 | 0 | -1 | 1 |
| 1 | 0 | 1 | 1 | -1 | 0 |
| 1 | 0 | 0 | 1 | 0 | -1 |
| 1 | 1 | 1 | 0 | 0 | 0 |
[1] Стирбан, А., И. Болдея и Г. Д. Андрееску. «Управление двигателем BLDC-PM без датчика движения с автономным FEM-информационным управлением положением и скоростью наблюдателя». Транзакции IEEE для отраслевых приложений. 48, № 6 (2012): 1950-1958.

