Дискретный контроллер тока двигателя постоянного тока без щетки
Simscape / Электрический / Контроль / Контроль BLDC
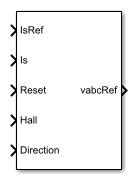
Блок контроллера тока BLDC использует этот алгоритм для управления током в бесщеточном двигателе постоянного тока.
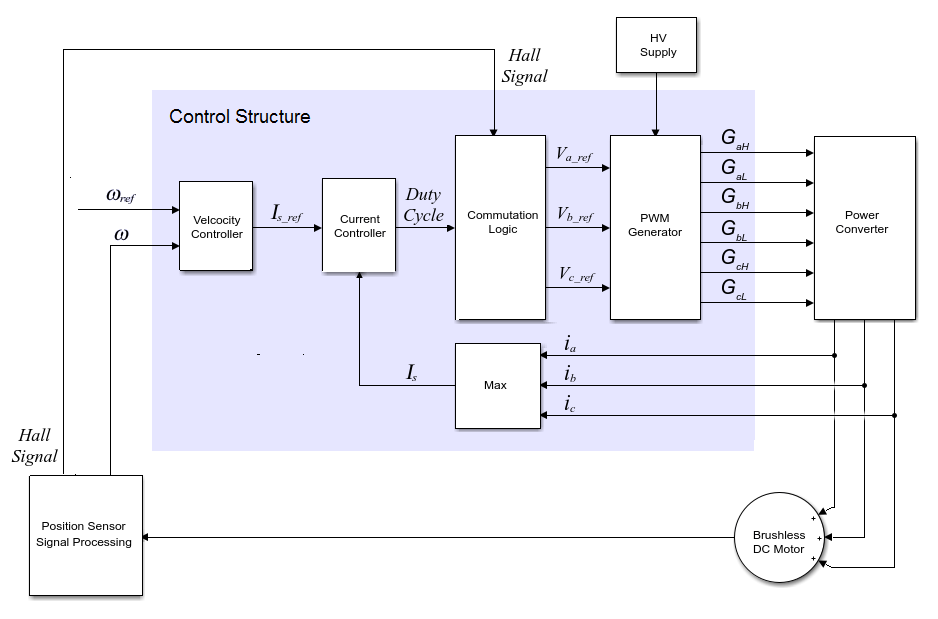
Контроллер тока BLDC формирует рабочий цикл блока BLDC, реализуя пропорционально-интегральное (PI) управление током, используя это уравнение.
Is_ref−Is)
Где:
D - рабочий цикл.
Kp - пропорциональный коэффициент усиления.
Ki - интегральное усиление.
Ts - период времени.
Is_ref - опорный ток.
Является измеренным током.
Gzc - полином подавления нуля.
Функция передачи с замкнутым контуром для алгоритма управления PI дает нуль, который может быть отменен с помощью подавления нуля в тракте прямой связи. Передаточная функция компенсации нуля в дискретное время:
KpKiKpKi).
Блок получает сигналы управления для трех фаз путем умножения рабочего цикла на сигналы коммутации. Полученные три управляющих сигнала нормализуются в интервале [-1, 1].
[1] Стирбан, А., И. Болдея и Г. Д. Андрееску. «Управление двигателем BLDC-PM без датчика движения с автономным FEM-информационным управлением положением и скоростью наблюдателя». Транзакции IEEE для отраслевых приложений. 48, № 6 (2012): 1950-1958.

