Трехобмоточный бесщеточный электродвигатель постоянного тока с трапециевидным распределением потока
Simscape/Электрический/Электромеханический/Постоянный магнит
Блок BLDC моделирует синхронную машину с постоянным магнитом с трехфазным статором с намоткой. Блок имеет четыре варианта определения распределения постоянного магнитного потока как функции угла ротора. Две опции допускают простую параметризацию, предполагая совершенную трапецию для задней emf. Для простой параметризации задается либо связь потока, либо обратная emf, индуцированная ротором. Две другие опции дают более точные результаты с использованием указанных табличных данных. Для получения более точных результатов можно задать частную производную связи потока или измеренную обратную постоянную ЭДС для заданной скорости ротора.
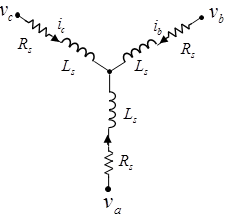
На рисунке показана эквивалентная электрическая цепь для обмоток статора.
На этом рисунке показана конструкция двигателя с одной полюсной парой на роторе.
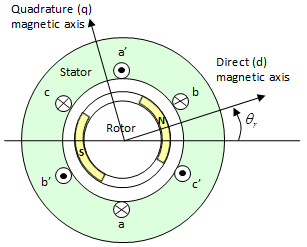
Для условных осей, показанных на предыдущем чертеже, потоки α - фазы и постоянного магнита выравниваются, когда угол λ r ротора равен нулю. Блок поддерживает определение второй оси ротора. Для второго определения угол ротора представляет собой угол между α - фазной магнитной осью и q-осью ротора.
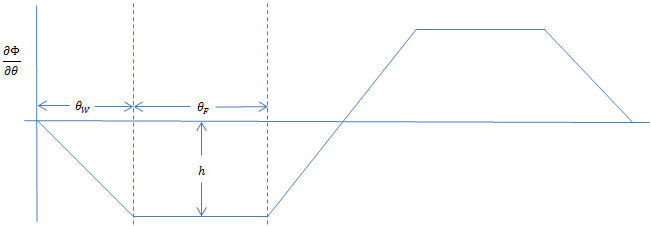
Магнитное поле ротора за счет постоянных магнитов создает трапециевидную скорость изменения потока с углом ротора. На рисунке показана эта скорость изменения потока.
Обратная эдс - скорость изменения потока, определяемая
где:
Λ - связь постоянного магнитного потока.
λ - угол ротора.
λ - механическая скорость вращения.
Высота h Из пикового потока постоянного магнита получают трапециевидную скорость изменения профиля потока.
Интегрируя в диапазоне от 0 до λ/2,
),
где:
Фмакс - связь постоянного магнитного потока.
h - скорость изменения высоты профиля потока.
δ F - диапазон углов ротора, в котором обратная ЭДС, индуцируемая потоком постоянного магнита в статоре, является постоянной.
δ W - диапазон углов ротора, в котором обратная ЭДС линейно увеличивается или уменьшается, когда ротор движется с постоянной скоростью.
Перестановка предыдущего уравнения,
startW).
Напряжения на обмотках статора определяются
d
где:
va, vb и vc - внешние напряжения, приложенные к трем электрическим соединениям двигателя.
Rs - эквивалентное сопротивление каждой обмотки статора.
ia, ib и ic - токи, протекающие в обмотках статора.
- скорости изменения магнитного потока в каждой обмотке статора.
Постоянный магнит и три обмотки вносят вклад в общий поток, связывающий каждую обмотку. Общий поток определяется как
[
где:
в качестве общих потоков, связывающих каждую обмотку статора.
Laa, Lbb и Lcc являются самоиндукциями обмоток статора.
Lab, Lac, Lba и т.д. являются взаимными индуктивами обмоток статора.
В качестве потоков постоянного магнита, связывающих обмотки статора, используются, в частности, потоки постоянного магнита.
Индуктивности в обмотках статора являются функциями угла ротора, определяемого
2startr),
2λ/3)),
(
(
(
и
(
где:
Ls - самоиндуктивность статора на фазу - Средняя самоиндуктивность каждой из обмоток статора.
Lm - флуктуация индуктивности статора - флуктуация собственной индуктивности и взаимной индуктивности с изменением угла ротора.
Ms - взаимная индуктивность статора - средняя взаимная индуктивность между обмотками статора.
Поток постоянного магнита, связывающий каждую обмотку статора, следует трапециевидному профилю, показанному на чертеже. Блок реализует трапециевидный профиль с помощью таблиц поиска для вычисления значений потока постоянных магнитов.
Определяющими уравнениями напряжения и крутящего момента для блока являются
]),
NstartiqLq,
NstartidLd,
и
∂ψam∂θr∂ψbm∂θr∂ψcm∂θr],
где:
vd, vq и v0 - напряжения d-оси, q-оси и нулевой последовательности.
P - преобразование парка, определяемое
((,,
N - число пар полюсов постоянных магнитов ротора.
λ - механическая частота вращения ротора.
∂ψam∂θr,∂ψbm∂θr и
являются частными производными мгновенного потока постоянного магнита, связывающего каждую фазную обмотку.
id, iq и i0 - токи d-оси, q-оси и нулевой последовательности, определяемые
iaibic].
Ld = Ls + Ms + 3/2 Lm. Ld - индуктивность d-оси статора.
Lq = Ls + Ms − 3/2 Lm. Lq - индуктивность по оси q статора.
L0 = Ls - 2Ms. L0 - индуктивность нулевой последовательности статора.
T - крутящий момент ротора. Крутящий момент течет от корпуса двигателя (физический порт C блока) к ротору двигателя (физический порт R блока).
Потери железа делятся на два члена, один из которых представляет основную траекторию намагничивания, а другой - поперечную траекторию острия зуба, которая становится активной во время работы с ослабленным полем. Модель потерь железа, которая основана на творчестве Меллера [3].
Термин, представляющий основной путь намагничивания, зависит от индуцированного среднеквадратичного напряжения статора, :
aexk1.5Vmrms1.5
Это доминирующий термин при работе без нагрузки. k - обратная постоянная ЭДС, относящаяся к среднеквадратичным вольтам на Гц. Определяется как Vmrms/f, где f - электрическая частота. Первый член с правой стороны - магнитные гистерезисные потери, второй - вихревые токовые потери и третий - избыточные потери. Три коэффициента, отображаемые на числителях, получаются из значений, которые предоставляются для гистерезиса с разомкнутым контуром, вихревых и избыточных потерь.
Термин, представляющий траекторию поперечной вершины зуба, становится важным, когда установлено поле размагничивания, и может быть определен из теста короткого замыкания на конечно-элементный анализ. Это зависит от среднеквадратичного значения, связанного с потоком наконечника поперечного зуба, *:
bexk1.5Vdrms * 1,5
Три числительных члена получаются из значений, которые вы предоставляете для гистерезиса короткого замыкания, вихревых и избыточных потерь.
Блок имеет четыре дополнительных тепловых порта, по одному для каждой из трех обмоток и по одному для ротора. По умолчанию эти порты скрыты. Чтобы открыть тепловые порты, щелкните правой кнопкой мыши блок в модели, выберите Simscape > Block choices, а затем выберите требуемый вариант блока с тепловыми портами: Composite theral-phase ports | Show thermal port или Expanded threase-phase ports | Show thermal port. Это действие отображает тепловые порты на значке блока и отображает параметры Температурная зависимость (Temperature Dependence) и Тепловой порт (Thermal Port). Эти параметры описаны далее на этой справочной странице.
Используйте тепловые порты для моделирования влияния сопротивления меди и потерь железа, которые преобразуют электроэнергию в тепло. Дополнительные сведения об использовании тепловых портов в блоках привода см. в разделе Моделирование тепловых эффектов во вращательных и поступательных приводах.
Параметры «Переменные» используются для задания приоритетов и начальных целевых значений для переменных блока перед моделированием. Дополнительные сведения см. в разделе Установка приоритета и начальной цели для переменных блока.
[1] Kundur, P. Стабильность и управление энергосистемой. Нью-Йорк, Нью-Йорк: Макгроу Хилл, 1993.
[2] Андерсон, П. М. Анализ неисправных энергосистем. Хобокен, Нью-Джерси: Wiley-IEEE Press, 1995.
[3] Меллер, П. Х., Р. Вробель и Д. Холлидей. «Вычислительно эффективная модель потерь железа для бесщеточных машин переменного тока, которая обеспечивает номинальный поток и ослабленную работу в полевых условиях». Конференция по электрическим машинам и приводам IEEE. Май 2009 года.


