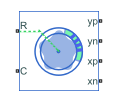
Индуктивный датчик положения ротора с четырьмя индуктивными катушками
Simscape/Электрические/Датчики и преобразователи
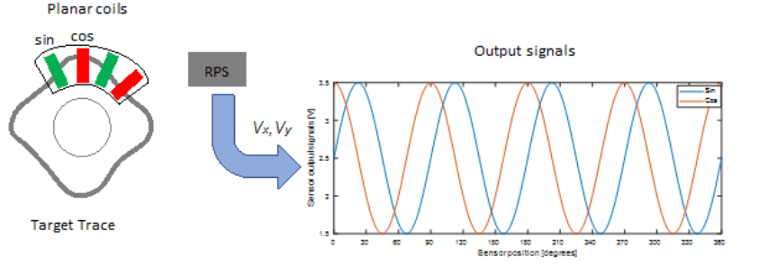
Блок индуктивного датчика положения ротора использует теорию потерь вихревого тока для получения положения ротора. Он состоит из четырех плоских катушек и целевого следа, которые определяют положение ротора. Целевая дорожка выполнена синусоидальной формы из проводящего материала. Расстояние между четырьмя плоскими катушками эквивалентно 90 градусам одного цикла.
Напряжения между элементами датчика описываются уравнениями:
где:
vx - косинусное напряжение.
vy - синусоидальное напряжение.
Ax и Ay - амплитуды напряжения для осей x и y, которые отражают несоответствие чувствительности.
Vx0 и Vy0 - смещения напряжения для осей x и y.
N - число пар полюсов.
λ - механическое положение.
β - квадратурная ошибка.
K - фактор падения.
Блок использует это уравнение для декодирования угла:
vyvx).
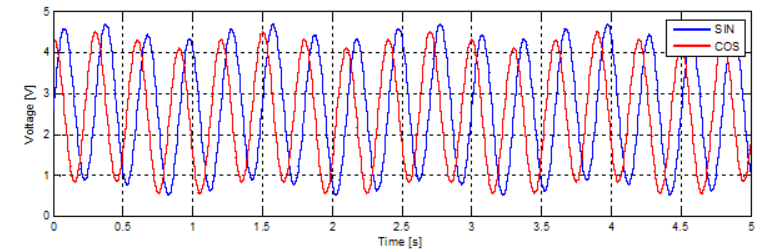
На этом рисунке показаны эффекты фактора падения:
Параметры «Переменные» используются для задания приоритетов и начальных целевых значений для переменных блока перед моделированием. Дополнительные сведения см. в разделе Установка приоритета и начальной цели для переменных блока.
