Силовые характеристики линейного пьезоэлектрического волнового двигателя
Simscape/Электрические/Электромеханические/Мехатронные приводы
Блок линейного привода пьезо представляет характеристики силы и скорости линейного пьезоэлектрического волнового двигателя. Блок представляет соотношение силы и скорости двигателя на уровне, подходящем для моделирования на уровне системы. Для моделирования двигателя блок использует следующие модели:
Двигатель не питается, когда вход v физического сигнала равен нулю. Это соответствует подаче нулевых среднеквадратичных вольт на двигатель. В этом сценарии блок моделирует двигатель с использованием следующих элементов:
Масса, значение параметра Масса плунжера (Plunger mass).
Трение, характеристики которого задаются с помощью значений параметров на вкладке Трение двигателя (Motor-Off Friction).
Блок использует блок Трения Simscape™Translational, чтобы смоделировать компонент трения. Дополнительные сведения о модели трения см. на странице вхождения блока поступательного трения.
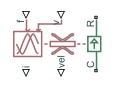
Когда двигатель активен, блок линейного привода Пьезо представляет характеристики двигателя с использованием следующей эквивалентной модели цепи.
На предыдущем рисунке:
Источник напряжения переменного тока представляет вход физического сигнала блока частотой f и величиной v.
Резистор R является основным элементом электрического и механического демпфирования.
Индуктор L представляет собой инерцию вибрации ротора.
Конденсатор С представляет собой пьезокристаллическую жесткость.
Конденсатор Cp представляет фазовую емкость. Это электрическая емкость, связанная с каждой из двух фаз двигателя.
Постоянная силы kf связывает среднеквадратичный ток i с результирующей механической силой.
Квадратичный элемент механического демпфирования, , формирует кривую сила-скорость преимущественно при скоростях, близких к максимальным оборотам в минуту. - линейная скорость.
Термин обозначает инерцию плунжера.
При инициализации модели блок вычисляет параметры модели R, L, C, kt и λ для обеспечения соответствия установившейся кривой сила-скорость значениям для следующих заданных пользователем параметров:
Номинальное усилие
Номинальная скорость
Максимальная скорость без нагрузки
Максимальная (остановочная) сила
Эти значения параметров определяются для значений параметров номинального среднеквадратичного напряжения и собственной частоты двигателя (или номинальной частоты).
Квадратичный элемент механического демпфирования создает квадратичную кривую сила-скорость. Кривые силы и скорости пьезоэлектрических двигателей обычно можно аппроксимировать более точно, используя квадратичную функцию, чем линейную, поскольку градиент силы и скорости становится круче, когда двигатель приближается к максимальной скорости.
Если масса плунжера М не указана в листе данных, можно выбрать значение, обеспечивающее хорошее соответствие времени отклика в кавычках. Время срабатывания часто определяется как время достижения ротором максимальной скорости при старте из покоя, в условиях холостого хода.
Коэффициент качества, заданный с помощью параметра Коэффициент качества резонанса (Resonance quality factor), относится к параметрам эквивалентной модели цепи следующим образом.
1RLC
Этот термин обычно не указывается в спецификации. Можно рассчитать его значение, сопоставив чувствительность силы с частотой возбуждения.
Для изменения направления работы двигателя на обратное сделайте вход физического сигнала v отрицательным.
При питании двигателя модель действительна только между нулевой и максимальной скоростью по следующим причинам:
Листы технических данных не содержат информации для работы вне нормального диапазона.
Пьезоэлектрические двигатели не предназначены для работы в области торможения и генерации.
Блок ведет себя следующим образом за пределами допустимой рабочей области:
При скорости ниже нуля модель сохраняет постоянную силу с нулевым значением скорости. Нулевое значение скорости - это значение параметра максимальной (остановочной) силы, если входное напряжение среднеквадратичной частоты равно значению параметра номинального среднеквадратичного напряжения, а входное значение частоты равно значению параметра собственной частоты двигателя.
Выше максимальной скорости модель создает отрицательную силу, предсказанную моделью эквивалентной цепи, но ограничивает абсолютное значение силы максимальной силой нулевой скорости.
Характеристики силы и скорости наиболее характерны при работе модели вблизи номинального напряжения и резонансной частоты.
