Формирование широтно-импульсного модулированного сигнала или формы сигнала
Simscape / Электрический / Контроль / Модуляция Ширины импульса
Блок генератора ШИМ реализует генератор ШИМ. Способ широтно-импульсной модуляции управляет передачей мощности от одного электрического компонента к другому посредством быстрого переключения между полной передачей мощности и отсутствием передачи мощности.
Блок генератора ШИМ выводит либо 1 когда рабочий цикл превышает значение счетчика несущей, или 0 в противном случае. Можно задать период каждого цикла, указав период таймера Tper. Можно изменить начальный выходной сигнал или фазу выходного сигнала ШИМ, указав один из трех типов счетчиков несущих:
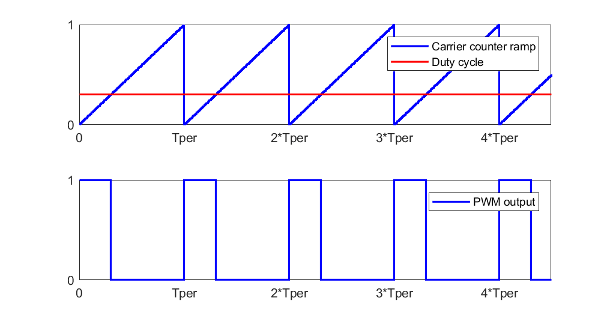
Up counter - выходной сигнал PWM инициализируется в начале on цикл. На этом рисунке показан сигнал счетчика несущей и соответствующий выходной сигнал ШИМ.
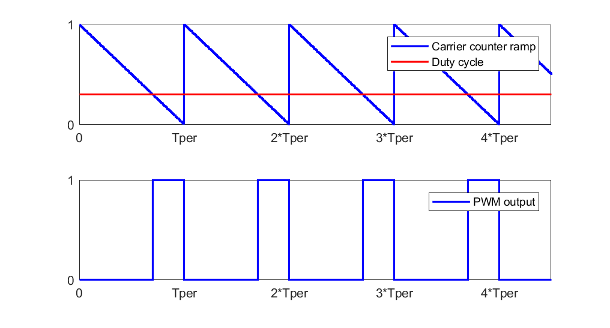
Down counter - выходной сигнал PWM инициализируется в начале off цикл. На этом рисунке показан сигнал счетчика несущей и соответствующий выходной сигнал ШИМ.
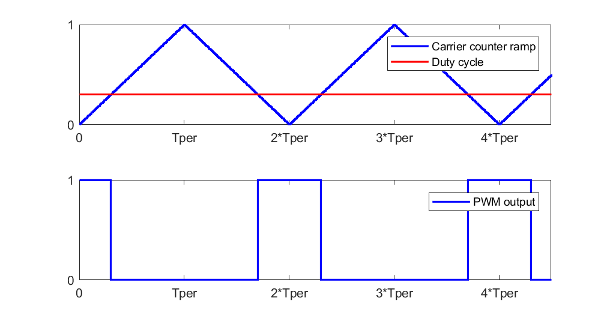
Счетчик «вверх-вниз» - выходной сигнал ШИМ инициализируется на полпути on цикл. На этом рисунке показан сигнал счетчика несущей и соответствующий выходной сигнал ШИМ.