Контроллер дискретного состояния и обратной связи с интегральным действием
Simscape / Электрический / Контроль / Общий Контроль
Блок контроллера состояния-обратной связи реализует контроллер состояния-обратной связи дискретного времени с интегральным действием. Этот блок используется для управления линейными системами с одним или несколькими входами и одним или несколькими выходами. Интегральное действие служит для устранения стационарной ошибки в контролируемых выходах. Можно определить контроллер с помощью предварительно рассчитанного оптимального усиления или использовать модель состояния-пространства системы для генерации этого усиления с помощью размещения полюсов.
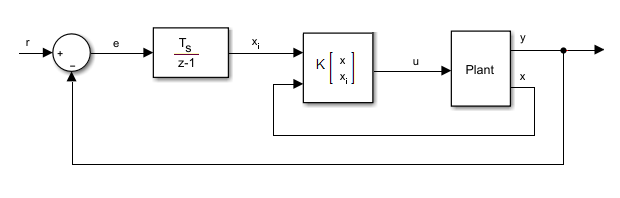
Интеграл ошибки отслеживания, xi, является дополнительным состоянием, которое обеспечивает нулевую ошибку установившегося состояния для системы с замкнутым контуром. Вектор расширенного состояния:
],
Где:
x - вектор состояния.
xi является интегралом ошибки отслеживания.
xe - вектор расширенного состояния.
Следовательно, контрольное действие
Kxe,
Где:
K - матрица обратной связи, то есть размещение полюса.
u - выходной сигнал контроллера.
Измерение и оценка состояния системы происходят вне контроллера.
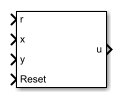
r - Ссылка на заводОпорный сигнал системы установки.
Типы данных: single | double
x - Вектор состоянияИзмеренный или оцененный вектор состояния системы.
Типы данных: single | double
Reset - Перезагрузка интегратораВнешний сигнал сброса (передний фронт) для интегратора.
Типы данных: Boolean
y - Производительность установкиВыходной сигнал системы установки.
Типы данных: single | double
u - Выход контроллераВыходной сигнал системы управления.
Типы данных: single | double
State-feedback design - Генерация контроллераState-feedback gain (по умолчанию) | Desired eigenvaluesВыберите стратегию параметризации усиления контроллера:
State-feedback gain - Укажите коэффициент усиления контроллера напрямую
Desired eigenvalues - Укажите модель установки и требуемые собственные значения, из которых будет генерироваться коэффициент усиления контроллера.
State-feedback parameterization - Параметризация состояния обратной связиDiscrete-time (по умолчанию) | Continuous-timeВыберите стратегию параметризации матриц состояния-пространства и требуемых полюсов для контроллера. Реализация блока дискретна независимо от этой параметризации.
Чтобы включить этот параметр, задайте для конструкции обратной связи состояния значение Desired eigenvalues.
Controller matrix - Матрица контроллераМатрица обратной связи контроллера. Для определения матрицы контроллера при наличии лицензии на Toolbox™ системы управления используйте lqr или lqi функция.
Чтобы включить этот параметр, задайте для конструкции обратной связи состояния значение State-feedback gain.
Discrete-time A matrix - Матрица в дискретное времяМатрица состояний дискретно-временной модели состояния-пространства. Матрица A должна быть квадратной, с числом строк и столбцов, равным порядку системы.
Чтобы включить этот параметр, установите параметризацию состояния-обратной связи в значение Discrete-time.
Discrete-time B matrix - матрица B в дискретное времяВходная матрица дискретно-временной модели состояния-пространства. Матрица B должна иметь количество строк, равное порядку системы, и количество столбцов, равное количеству системных входов.
Чтобы включить этот параметр, установите параметризацию состояния-обратной связи в значение Discrete-time.
Discrete-time C matrix - матрица C в дискретное времяВыходная матрица дискретно-временной модели состояния-пространства. Матрица C должна иметь количество строк, равное количеству выходов системы, и количество столбцов, равное порядку системы.
Чтобы включить этот параметр, установите параметризацию состояния-обратной связи в значение Discrete-time.
Discrete-time D matrix - D-матрица в дискретное времяМатрица прохождения дискретно-временной модели состояния-пространства. Матрица D должна иметь количество строк, равное количеству системных выходов, и количество столбцов, равное количеству системных входов.
Чтобы включить этот параметр, установите параметризацию состояния-обратной связи в значение Discrete-time.
Continuous-time A matrix - Матрица в непрерывном времениМатрица состояний модели непрерывного времени «состояние-пространство». Матрица A должна быть квадратной, с числом строк и столбцов, равным порядку системы.
Чтобы включить этот параметр, установите параметризацию состояния-обратной связи в значение Continuous-time.
Continuous-time B matrix - Матрица B в непрерывном режимеВходная матрица модели состояния-пространства непрерывного времени. Матрица B должна иметь количество строк, равное порядку системы, и количество столбцов, равное количеству системных входов.
Чтобы включить этот параметр, установите параметризацию состояния-обратной связи в значение Continuous-time.
Continuous-time C matrix - матрица C в непрерывном режимеВыходная матрица модели состояния-пространства непрерывного времени. Матрица C должна иметь количество строк, равное количеству выходов системы, и количество столбцов, равное порядку системы.
Чтобы включить этот параметр, установите параметризацию состояния-обратной связи в значение Continuous-time.
Continuous-time D matrix - D-матрица в непрерывном времениМатрица прохождения модели состояния-пространства непрерывного времени. Матрица D должна иметь количество строк, равное количеству системных выходов, и количество столбцов, равное количеству системных входов.
Чтобы включить этот параметр, установите параметризацию состояния-обратной связи в значение Continuous-time.
Discretization sample time - Время дискретизации выборкиЗначение, используемое для дискретизации матриц пространства состояний и аппроксимации собственных значений дискретного времени.
Чтобы включить этот параметр, установите параметризацию состояния-обратной связи в значение Continuous-time и время выборки (-1 для унаследованных) -1.
Desired eigenvalues (discrete) - Собственные значения наблюдателяУкажите местоположение собственных значений, лежащих в пределах единичной окружности. Затем на основе этих собственных значений вычисляется коэффициент усиления контроллера. Размер вектора должен быть равен системному порядку плюс количество выходов.
Control action upper limit - умакс5 (по умолчанию) | скаляр больше значения параметра нижнего предела действия ControlВерхний предел для управляющего выходного сигнала.
Control action lower limit - умин0 (по умолчанию) | скалярНижний предел для управляющего выходного сигнала.
Sample time (-1 for inherited) - Интервал отбора проб-1 (по умолчанию) | значение по умолчанию или положительное числоИнтервал времени между выборками. Если блок находится внутри запускаемой подсистемы, наследуйте время выборки, установив для этого параметра значение -1. Если этот блок находится в модели непрерывного шага переменной, укажите время выборки явным образом. Дополнительные сведения см. в разделе Что такое время образца? и Укажите время образца.
1. Если смысл перевода понятен, то лучше оставьте как есть и не придирайтесь к словам, синонимам и тому подобному. О вкусах не спорим.
2. Не дополняйте перевод комментариями “от себя”. В исправлении не должно появляться дополнительных смыслов и комментариев, отсутствующих в оригинале. Такие правки не получится интегрировать в алгоритме автоматического перевода.
3. Сохраняйте структуру оригинального текста - например, не разбивайте одно предложение на два.
4. Не имеет смысла однотипное исправление перевода какого-то термина во всех предложениях. Исправляйте только в одном месте. Когда Вашу правку одобрят, это исправление будет алгоритмически распространено и на другие части документации.
5. По иным вопросам, например если надо исправить заблокированное для перевода слово, обратитесь к редакторам через форму технической поддержки.


