Привод шагового двигателя
Simscape/Электрические/Электромеханические/Нежелательные и шаговые
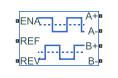
Блок драйвера шагового двигателя представляет драйвер для шагового двигателя. Она создает импульсные последовательности A и B, необходимые для управления двигателем. Этот блок инициирует шаг каждый раз, когда напряжение в порту ENA поднимается выше значения параметра Enable threshold voltage.
Если напряжение в порту REV меньше или равно значению параметра обратного порогового напряжения, импульс A выводит импульс B на 90 градусов. Если напряжение в порту REV больше порогового значения обратного напряжения, импульс B выводит импульс A на 90 градусов, и направление двигателя меняется на обратное.
В момент времени 0 импульс А является положительным, а импульс В - отрицательным.
Если для параметра Stepping mode установлено значение Half steppingблок привода шагового двигателя может вырабатывать выходные сигналы, необходимые для половинной шаговой передачи. В этом режиме существует промежуточное состояние между полными ступенями, в котором запитывается только одна из полуобмоток A или B. В результате размер шага равен половине полного размера шага шагового двигателя. На половине шагов обмотки, которые не питаются, закорачиваются. Это аппроксимирует эффект диода свободного хода, подключенного к обмоткам.
Если для параметра Режим моделирования (Simulation mode) задано значение Averaged, как для блока привода шагового двигателя, так и для подключенного к нему блока шагового двигателя, отдельные шаги не моделируются. Это может быть хорошим способом ускорить моделирование. Averaged режим предполагает, что внешний контроллер обеспечивает требование скорости шага. Потребность в ступенчатой скорости определяется по напряжению, приложенному между портами ENA и REF на блоке драйвера шагового двигателя, путем умножения этого напряжения на значение параметра чувствительности ступенчатой скорости. Направление вращения задается портом REF так же, как для Stepping режим.
Averaged режим должен передавать информацию о требуемой скорости шага, а также информацию об амплитуде выходного напряжения блоку шагового двигателя. Для этого требование шаговой скорости подается в виде эквивалентного напряжения через порты A + и A-. Аналогично, информация об амплитуде выходного напряжения передается путем подачи установившегося напряжения через B + и B- порты со значением, равным параметру амплитуды выходного напряжения.
Использовать Averaged , блок драйвера шагового двигателя должен быть непосредственно соединен с блоком шагового двигателя, также работающим в Averaged режим.
При изменении с Stepping кому Averaged в режиме и обратно необходимо изменить блоки восходящего направления, которые обеспечивают входные напряжения для блока привода шагового двигателя. Одним из способов достижения этой цели является использование различных подсистем Simulink ®.


