Шаговый двигатель, подходящий для полно-, полу- и микростеппингового представления
Simscape/Электрические/Электромеханические/Нежелательные и шаговые
Блок шагового двигателя представляет шаговый двигатель. Он использует входные последовательности импульсов A и B для управления механическим выходом в соответствии со следующими уравнениями:
eA )/L
eB )/L
= Te
(Nrθ) −Tdsin (4Nrθ)
λ
где:
eA и eB - обратные электродвижущие силы (emfs), индуцированные в фазных обмотках A и B соответственно.
iA и iB являются токами обмотки фазы А и В.
vA и vB - напряжения обмотки фазы A и B.
Km - постоянный крутящий момент двигателя.
Nr - количество зубьев на каждом из двух полюсов ротора. Параметр Full step size (Полный размер шага) равен (λ/2 )/Nr.
R - сопротивление обмотки.
L - индуктивность обмотки.
Rm - сопротивление намагничиванию.
B - гашение вращения.
J - инерция.
λ - частота вращения ротора.
Δ - угол ротора.
Td - амплитуда крутящего момента фиксатора.
Te - электрический крутящий момент.
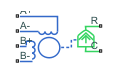
Если начальный ротор равен нулю или является кратным (δ/2 )/Nr, ротор выравнивается с фазной обмоткой импульса A. Это происходит, когда положительный ток течет от A + к A- портам и нет тока, протекающего от B + к B- портам.
Используйте блок привода шагового двигателя, чтобы создать последовательности импульсов для блока шагового двигателя.
Блок шагового двигателя создает положительный крутящий момент, действующий от механических портов C к R, когда фаза импульса A ведет фазу импульса B.
Если для параметра Режим моделирования (Simulation mode) задано значение Averaged, как для блока Stepper Motor, так и для блока Stepper Motor Driver, который управляет им, отдельные шаги не моделируются. Это может быть хорошим способом ускорить моделирование. В режиме «Усредненный» (Averaged) в условиях отсутствия скольжения двигатель и привод представлены линейной системой второго порядка, отслеживающей заданную скорость шага. Требуемая ступенчатая скорость определяется непосредственно по напряжению на A + и A-. Так, например, напряжение + 10 В на клеммах A + и A- интерпретируется как требование скорости шага 10 шагов в секунду. Для получения дополнительной информации о подключении блока привода к контроллеру угла шага см. справочную страницу блока привода шагового двигателя.
Усредненный режим включает в себя блок оценки проскальзывания для прогнозирования того, проскальзывал ли бы шаговый двигатель при работе в режиме моделирования степпинга. Проскальзывание прогнозируют, если крутящий момент двигателя превышает вектор значения параметра максимальных значений крутящего момента в течение более чем одного периода шага, причем период шага определяют из текущей требуемой скорости шага. После обнаружения проскальзывания моделирование будет продолжено или остановлено с ошибкой в соответствии со значением параметра Action on slipping. Если выбрано действие, позволяющее продолжить моделирование, обратите внимание, что результаты моделирования могут быть неверными. При проскальзывании крутящий момент, создаваемый двигателем, обычно не является максимально доступным крутящим моментом; максимальный крутящий момент достигается только в том случае, если шаговый контроллер обнаруживает проскальзывание и соответственно регулирует команду скорости шага.
Динамика эквивалентной системы второго порядка определяется из значений, заданных для параметров команды Приблизительная суммарная инерция нагрузки (Approximate total load inertia) и Максимальная скорость шага (Maximum step rate). Важно установить как можно более точные значения для этих параметров, чтобы команда скорости шага отслеживалась, а блок не генерировал ложных предупреждений о проскальзывании или ошибок.
Если двигатель работает в усредненном режиме с открытыми дополнительными тепловыми портами (см. раздел Тепловые порты и эффекты), то тепло добавляется к тепловым портам при условии, что обмотки всегда питаются, даже если команда скорости шага равна нулю. Блок выполняет регулировку на половину ступенчатого перемещения и на пониженный крутящий момент (и токи обмотки) при более высоких скоростях. Чтобы эти регулировки были правильными, вектор максимальных значений параметров крутящего момента должен быть верным. Для половинной ступенчатой обработки при нулевой скорости теплота, генерируемая блоком, представляет собой среднее значение теплоты, генерируемой при остановке на половинной ступени и на полной ступени.
Чтобы проверить конфигурации модели усредненного режима, в которых прогнозируется проскальзывание, сравните результаты с тем же моделированием, которое выполняется в шаговом режиме.
Блок имеет три дополнительных тепловых порта, по одному для каждой из двух обмоток и по одному для ротора. По умолчанию эти порты скрыты. Чтобы открыть тепловые порты, щелкните правой кнопкой мыши блок в модели, а затем в контекстном меню выберите «Simscape» > «Block choices» > «Show thermal port». Это действие отображает тепловые порты на значке блока и добавляет вкладки Температурная зависимость (Temperature Dependence) и Тепловой порт (Thermal Port) в диалоговое окно блока. Эти вкладки описаны далее на этой справочной странице.
Используйте тепловые порты для моделирования влияния сопротивления меди и потерь железа, которые преобразуют электроэнергию в тепло. При открытии этих портов предполагается, что сопротивление обмотки линейно зависит от температуры и задается следующим образом:
| R = R0 (1 + α (T - T0)) | (1) |
где:
R - сопротивление при температуре T.
R0 - сопротивление при измеренном (или эталонном) температурном T0. Укажите исходную температуру с помощью параметра Температура измерения (Measurement temperature).
α - температурный коэффициент сопротивления, который задается параметром «Температурные коэффициенты сопротивления» [alpha_A alpha_B]. Типичным значением для меди является 0.00393/K.
Блок рассчитывает температуру каждой из обмоток и ротора по
Q
где
M - тепловая масса. Задайте это значение для обмоток с помощью параметра «Тепловая масса обмотки» [M_A M_B] и для ротора с помощью параметра «Тепловая масса ротора».
T - температура. Укажите начальные значения для обмоток с помощью параметра «Начальная температура обмотки» [T_A T_B] и для ротора с помощью параметра «Начальная температура ротора».
Q - тепловой поток, который рассчитывается по потерям железа обмоток:
αm/100) + QB (αm/100)
где αm - процент сопротивления намагничиванию, связанный с ротором. Укажите этот процент, используя процентное значение сопротивления намагничиванию, связанное с параметром ротора.
Для блока шагового двигателя имеется несколько встроенных параметризаций.
Эти данные предварительной параметризации позволяют настроить блок для представления определенного компонента поставщика. Чтобы загрузить предопределенную параметризацию, щелкните гиперссылку «Select a defined parameterization» в маске блока «Stepper Motor» и выберите конкретную деталь, которую требуется загрузить, из списка доступных компонентов.
Примечание
Предопределенные параметризации компонентов Simscape используют доступные источники данных для предоставления значений параметров. Для заполнения недостающих данных используются инженерные суждения и упрощающие допущения. В результате следует ожидать отклонения между моделируемым и фактическим физическим поведением. Для обеспечения требуемой точности необходимо проверить смоделированное поведение на соответствие экспериментальным данным и при необходимости уточнить модели компонентов.
Модель основана на следующих допущениях:
В этой модели игнорируются эффекты магнитного насыщения и любая магнитная связь между фазами.
При установке флажка Начать моделирование из стационарного состояния (Start simulation from steading state) в блоке Конфигурация (Configuration) Simscape™Solver этот блок не инициализирует значение угла начального ротора между -δ и δ.
Чтобы использовать усредненный режим, блок шагового двигателя должен быть непосредственно соединен с блоком драйвера шагового двигателя, также работающим в усредненном режиме.
Усредненный режим является аппроксимацией, и точного отслеживания шага по сравнению со степпингом не следует ожидать.
Обнаружение проскальзывания в усредненном режиме является приблизительным и зависит от хорошей оценки инерции нагрузки и максимальной скорости шага. Неправильные значения могут привести к обнаружению ложного проскальзывания.
При моделировании проскальзывания в усредненном режиме предполагается, что контроллер шагового двигателя регулирует команду скорости шага так, чтобы достичь максимально возможного крутящего момента.
[1] М. Бодсон, Ж. Н. Чиассон, Р. Т. Новотнак и Р. Б. Рековски. «Высокопроизводительное нелинейное управление обратной связью шагового двигателя постоянного магнита». IEEE Transactions on Control Systems Technology, том 1, № 1, март 1993 года.
[2] П. П. Акарнли. Stepping Motors: Руководство по современной теории и практике. Нью-Йорк: Перегрин, 1982.
[3] С. Е. Лышевски. Электромеханические системы, электрические машины и прикладная мехатроника. КПР, 1999 ГОД.


