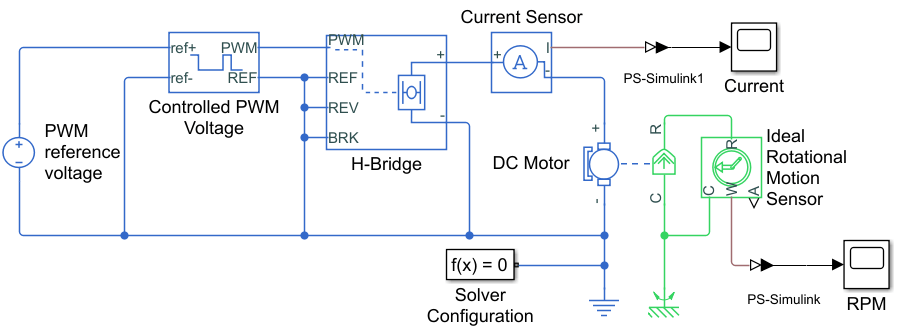
В этом примере моделируется двигатель постоянного тока, приводимый в действие постоянным входным сигналом, который аппроксимирует широтно-импульсный модулированный сигнал, и просматривается текущее и вращательное движение на выходе двигателя.
Для просмотра завершенной модели откройте пример двигателя постоянного тока, управляемого ШИМ.
Выберите блоки для представления входного сигнала, двигателя постоянного тока и выходного сигнала двигателя.
В следующей таблице описывается роль блоков, представляющих компоненты системы.
Блок | Описание |
|---|---|
| Конфигурация решателя | Определение параметров решателя, применяемых ко всем блокам физического моделирования |
| Преобразователь PS-Simulink | Преобразует входной физический сигнал в сигнал Simulink ® |
| Управляемое напряжение ШИМ | Генерирует сигнал, аппроксимирующий входной сигнал двигателя с широтно-импульсной модуляцией |
| H-мост | Приводит в действие двигатель постоянного тока |
| Двигатель постоянного тока | Преобразует входную электрическую энергию в механическое движение |
| Датчик тока | Преобразует электрический ток, который приводит в действие двигатель, в измеряемый физический сигнал, пропорциональный току |
| Источник постоянного напряжения | Генерирует напряжение постоянного тока |
| Эталонное электрическое оборудование | Обеспечивает электрическое заземление |
| Опорная точка механического вращения | Обеспечивает механическое заземление |
| Идеальный датчик вращательного движения | Преобразует вращательное движение двигателя в измеряемый физический сигнал, пропорциональный движению |
| Объем | Отображение тока двигателя и вращательного движения |
Создайте новую модель.
Добавьте в модель блоки, перечисленные в следующей таблице. Столбец «Библиотека» таблицы указывает иерархический путь к каждому блоку.
Блок | Библиотека | Количество |
|---|---|---|
| Конфигурация решателя | Simscape > Утилиты | 1 |
| Преобразователь PS-Simulink | Simscape > Утилиты | 2 |
| Управляемое напряжение ШИМ | Simscape > Электрооборудование > Интегральные схемы | 1 |
| H-мост | Simscape > Electrical > Полупроводники и преобразователи > Преобразователи | 1 |
| Двигатель постоянного тока | Simscape > Electrical > Электромеханические > Щеточные двигатели | 1 |
| Датчик тока | Simscape > Foundation Library > Electrical > Электрические датчики | 1 |
| Источник постоянного напряжения | Simscape > Foundation Library > Electrical > Источники электричества | 1 |
| Эталонное электрическое оборудование | Simscape > Библиотека фундаментов > Electrical > Electrical Elements | 1 |
| Опорная точка механического вращения | Simscape > Библиотека фундаментов > Mechanical > Вращательные элементы | 1 |
| Идеальный датчик вращательного движения | Simscape > Foundation Library > Mechanical > Механические датчики | 1 |
| Объем | Simulink > Часто используемые блоки | 2 |
Примечание
Можно использовать функцию Simscape™ ssc_new с типом домена electrical для создания модели Simscape, содержащей следующие блоки:
Конвертер Simulink-PS
Преобразователь PS-Simulink
Объем
Конфигурация решателя
Эталонное электрическое оборудование
Переименуйте и подключите блоки, как показано на схеме.
Теперь можно задать параметры блока.
Задайте следующие параметры для представления поведения компонентов системы.
Следующие блоки определяют информацию о модели, которая не относится к конкретному блоку:
Конфигурация решателя
Эталонное электрическое оборудование
Опорная точка механического вращения
Как и в моделях Simscape, необходимо включить блок конфигурации решателя в каждую топологически отличную физическую сеть. Этот пример имеет одну физическую сеть, поэтому используйте один блок конфигурации решателя со значениями параметров по умолчанию.
В каждую сеть Electrical™ Simscape необходимо включить блок электрических ссылок. В каждую сеть, включающую электромеханические блоки, необходимо включить блок механической вращательной привязки. Эти блоки не имеют параметров.
Дополнительные сведения об использовании опорных блоков см. в разделе Правила заземления.
Входной сигнал двигателя генерируется с помощью следующих блоков:
Блок источника напряжения постоянного тока (опорное напряжение ШИМ) генерирует постоянный сигнал.
Блок управляемого напряжения ШИМ генерирует широтно-импульсный модулированный сигнал.
Блок H-Bridge приводит двигатель в движение.
В этом примере все входные порты блока H-Bridge, за исключением порта PWM, подключены к заземлению. В результате блок H-Bridge ведет себя следующим образом:
Когда двигатель включен, блок H-Bridge соединяет клеммы двигателя с источником питания.
Когда двигатель выключен, блок H-Bridge действует как свободный диод для поддержания тока двигателя.
В этом примере моделируется двигатель с постоянным током, значение которого является средним значением сигнала ШИМ. Используя этот тип сигнала, вы настраиваете быстрое моделирование, которое оценивает поведение двигателя.
Установите параметры блока источника постоянного напряжения следующим образом:
Постоянное напряжение к 2.5
Установите параметры блока управляемого напряжения ШИМ следующим образом:
Частота ШИМ до 4000
Режим моделирования для Averaged
Это значение указывает блоку генерировать выходной сигнал, значение которого является средним значением сигнала ШИМ. Моделирование двигателя усредненным сигналом оценивает поведение двигателя в присутствии сигнала ШИМ. Чтобы проверить это приближение, используйте значение PWM для этого параметра.
Установите параметры блока H-Bridge следующим образом:
Режим моделирования для Averaged
Это значение указывает блоку генерировать выходной сигнал, значение которого является средним значением сигнала ШИМ. Моделирование двигателя усредненным сигналом оценивает поведение двигателя в присутствии сигнала ШИМ. Чтобы проверить это приближение, используйте значение PWM для этого параметра.
Примечание
Режим моделирования для блоков управляемого напряжения ШИМ и H-Bridge должен быть одинаковым.
Настройте блок, моделирующий двигатель.
Установите параметры блока двигателя постоянного тока следующим образом, оставляя значения по умолчанию для установок, где это применимо:
Вкладка «Электрический момент»:
Параметризация модели для By rated power, rated speed & no-load speed
Индуктивность якоря к 0.01
Скорость холостого хода до 4000
Номинальная частота вращения (при номинальной нагрузке) до 2500
Номинальная нагрузка (механическая мощность) 10
Номинальное напряжение питания постоянного тока до 12
Вкладка «Mechanical» (Механи
Инерция ротора до 2000
Демпфирование ротора до 1e-06
Задайте параметры блоков, создающих отображение тока двигателя:
Блок датчика тока
Блок Converter1 PS-Simulink
Текущий объем
Из трех блоков только блок Converter1 PS-Simulink имеет параметры. Установите параметр блока выходного сигнала PS-Simulink Converter1 в значение A для индикации того, что входной сигнал блока имеет единицы ампер.
Задайте параметры блоков, создающих отображение крутящего момента двигателя:
Идеальный блок датчика вращательного движения
Блок преобразователя PS-Simulink
Объем оборотов
Из трех блоков только блок PS-Simulink Converter имеет параметры, которые необходимо настроить для этого примера. Установите параметр блока выходного сигнала PS-Simulink Converter в значение rpm для индикации того, что входной сигнал блока имеет единицы оборотов в минуту.
Примечание
Необходимо ввести это значение параметра. Он недоступен в раскрывающемся списке.
Настройте параметры решателя для использования решателя непрерывного времени, поскольку модели Simscape Electrical работают только с решателем непрерывного времени. Увеличьте максимальный размер шага, который может предпринять решатель, чтобы моделирование выполнялось быстрее.
В окне модели выберите Моделирование (Modeling) > Настройки модели (Model Settings), чтобы открыть диалоговое окно Параметры конфигурации (Configuration Parameters).
Выбрать ode15s (Stiff/NDF) из списка Решатель (Solver).
Разверните «Дополнительные параметры» и введите 1 для значения параметра Max step size.
Нажмите кнопку ОК.
Дополнительные сведения о настройке параметров решателя см. в разделе Моделирование электронной, мехатронной или электрической энергосистемы.
В этой части примера выполняется моделирование и печать результатов.
В окне модели выберите Моделирование (Simulation) > Выполнить (Run), чтобы запустить моделирование.
Для просмотра тока и крутящего момента двигателя в окнах «Область» дважды щелкните на блоках «Область». Это можно сделать до или после запуска моделирования.
Примечание
По умолчанию области отображаются на экране в виде стека друг над другом, поэтому можно увидеть только один из них. Щелкните и перетащите окна, чтобы изменить их положение.
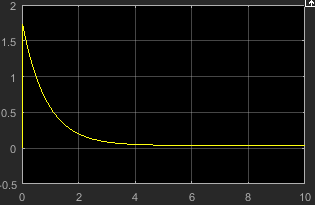
На следующем графике показан ток двигателя.
Ток двигателя
На следующем графике показана частота вращения двигателя.
Частота вращения двигателя
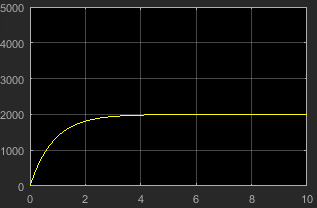
Как и ожидалось, двигатель работает со скоростью около 2000 об/мин, когда приложенное напряжение постоянного тока составляет 2,5 В.
