В этом примере показано, как обрабатывать и извлекать элементы из сегментированных данных, которые содержат признаки ухудшения неисправности вала, и как выполнять прогностическое ранжирование, чтобы определить, какие элементы лучше всего подходят для определения оставшегося срока службы (RUL). Разработка функции RUL основана на данных от запуска до отказа, а не на условно сгруппированных данных.
В примере предполагается, что вы уже знакомы с основными операциями приложения. Для получения учебного пособия по использованию приложения см. раздел Определение индикаторов условий для разработки алгоритма предиктивного обслуживания.
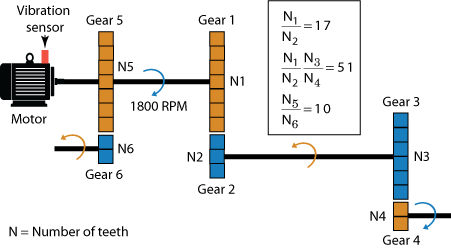
На следующем рисунке показана трансмиссия с шестью зубчатыми колесами. Двигатель привода снабжен датчиком вибрации. Трансмиссия не имеет тахометра. Двигатель приводит в действие постоянную скорость вращения 1800 об/мин без изменений. В этом приводе:
Шестерня 1 на валу двигателя входит в зацепление с шестерней 2 с передаточным отношением 17:1.
Конечное передаточное число, или отношение между шестернями 1 и 2 и шестернями 3 и 4, составляет 51:1.
Шестерня 5, также на валу двигателя, входит в зацепление с шестерней 6 с передаточным отношением 10:1.
Десять моделируемых машин используют этот привод. Все машины имеют разлом, развивающийся на валу шестерни 6. Эта ошибка становится все хуже с каждым днем. Скорость прохождения отказа фиксирована для каждой машины, но изменяется в зависимости от набора машин.
Данные регистрировались в течение одного периода 0,21 с каждый день в течение 15 дней. Для каждой машины эти ежедневные сегменты хранятся в соседних положениях в пределах одной переменной. Временные метки отражают время записи данных и непрерывно увеличиваются. Например, если временная метка на последней выборке дня 1 равна tf, а время выборки равно Ts, то временная метка на первой выборке дня 2 равна tf + Ts.
Для запуска загрузите данные в рабочую область MATLAB ® и откройте Diagnostic Feature Designer.
load(fullfile(matlabroot, 'toolbox', 'predmaint', 'predmaintdemos', ... 'motorDrivetrainDiagnosis', 'machineDataRUL3'), 'motor_rul3') diagnosticFeatureDesigner
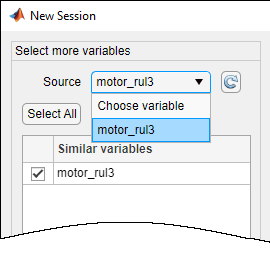
Импортируйте данные. Для этого на вкладке Конструктор элементов (Feature Designer) щелкните Создать сеанс (New Session). Затем в области Выбрать дополнительные переменные окна Создать сеанс выберите motor_rul3 в качестве исходной переменной.

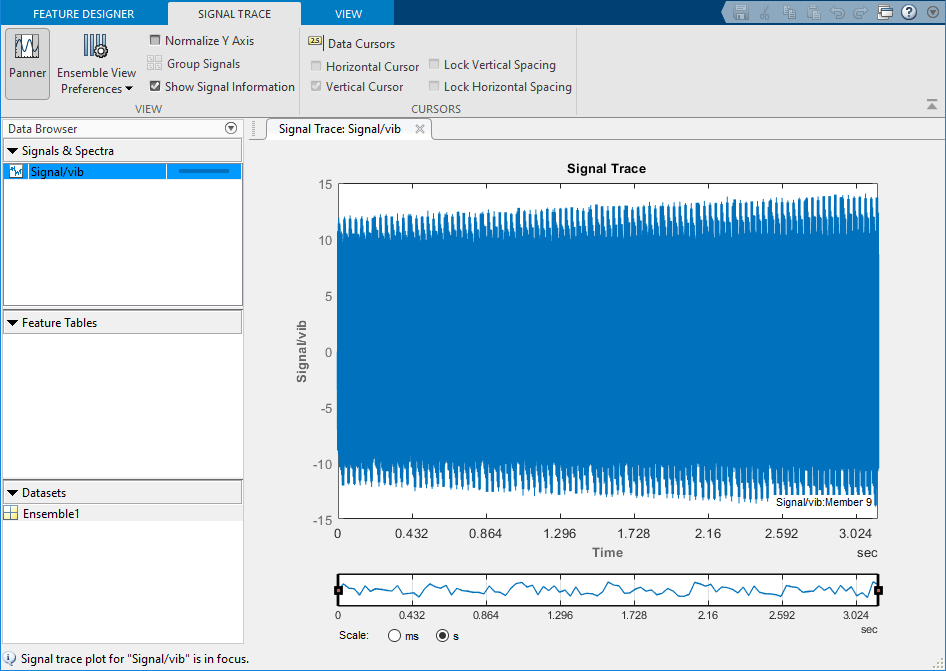
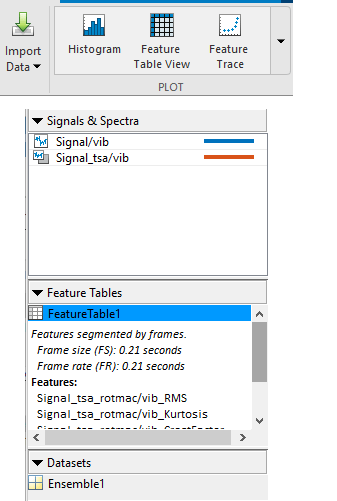
Завершите процесс импорта, приняв конфигурацию и переменные по умолчанию. Ансамбль состоит из одной переменной данных Signal/vib, который содержит сигнал вибрации. Переменные условия отсутствуют.
Просмотрите сигнал вибрации. Для этого в браузере данных выберите сигнал и постройте его график с помощью функции «Трассировка сигнала». Амплитуда сигнала непрерывно увеличивается по мере развития дефекта.
При разработке функций для использования RUL вы заинтересованы в отслеживании прогрессирования деградации, а не в выделении определенных неисправностей. Временная хронология полезной функции RUL обеспечивает видимость скорости деградации и в конечном итоге позволяет прогнозировать время до отказа.
Обработка на основе кадров позволяет отслеживать прогрессию сегмента деградации по сегментам. Небольшие или резкие изменения фиксируются в том сегменте, в котором они происходят. Сегментные признаки передают более точную запись ухудшения, чем могут обеспечить признаки, извлеченные из полного сигнала. Для прогнозирования RUL скорость прогрессии деградации так же важна, как и величина дефекта в данный момент времени.
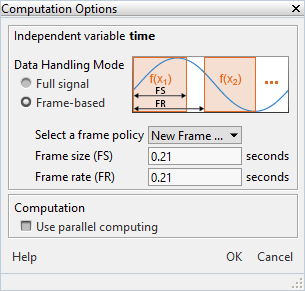
Набор данных для каждой машины поддерживает сегментированную обработку, предоставляя сегмент данных для каждого дня. Укажите обработку на основе кадров, чтобы каждый из этих сегментов обрабатывался отдельно. Так как данные собраны в сегментах 0,21 с, разделите данные для обработки на кадры 0,21 с.
Щелкните Опции расчета (Computation Options). В диалоговом окне установите для параметра «Режим обработки данных» значение «На основе кадра». Сегменты данных являются смежными, поэтому установите как размер кадра, так и частоту кадров на 0.21 секунд.
Синхронное усреднение по времени (TSA) усредняет сигнал по одному повороту, существенно уменьшая шум, который не когерентен с поворотом. Сигналы, отфильтрованные с помощью TSA, служат основой для анализа вращательного механизма, включая генерацию характеристик.
В этом примере скорость вращения устанавливается равной 1800 об/мин для каждой машины.
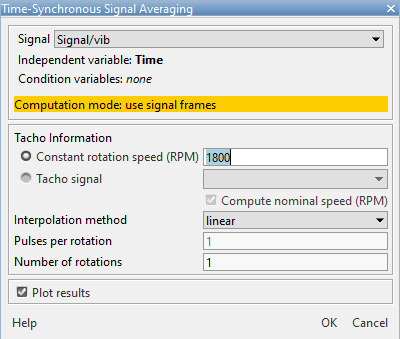
Для вычисления сигнала TSA выберите Filtering & Averaging > Time-Synchronous Signal Averaging (Фильтрация и усреднение). В диалоговом окне:
Подтвердите выбор в поле Signal.
В поле Tacho Information (Тахо-информация) выберите Константа частоты вращения (RPM) и задайте значение 1800.
Примите все остальные настройки.
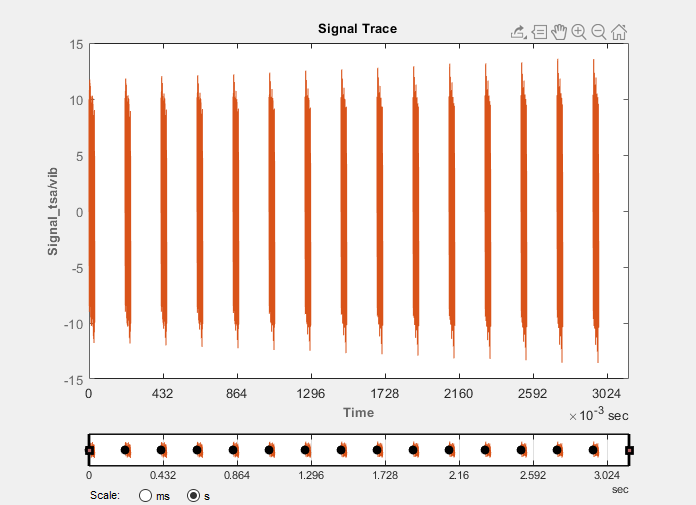
Приложение вычисляет сигнал TSA для каждого сегмента отдельно и по умолчанию строит график первого сегмента.
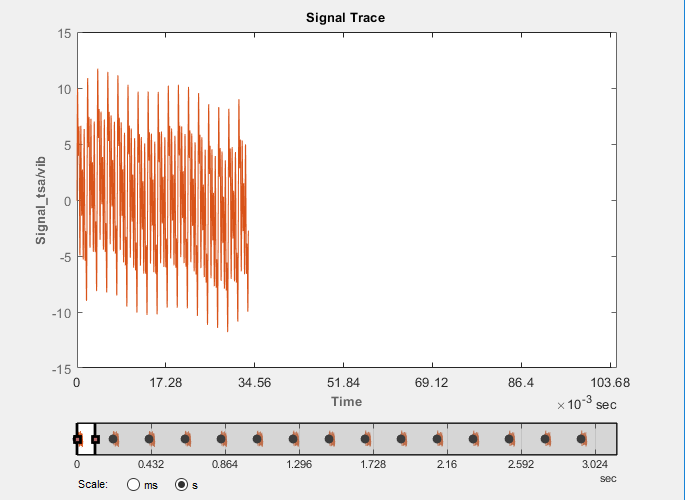
Используйте панорамирование, чтобы развернуть график на все сегменты. На графике показана немного увеличивающаяся амплитуда.
Используйте сигнал TSA для вычисления параметров вращающегося оборудования во временной области.
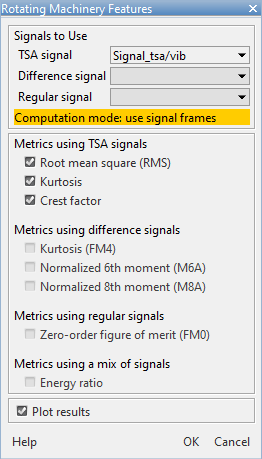
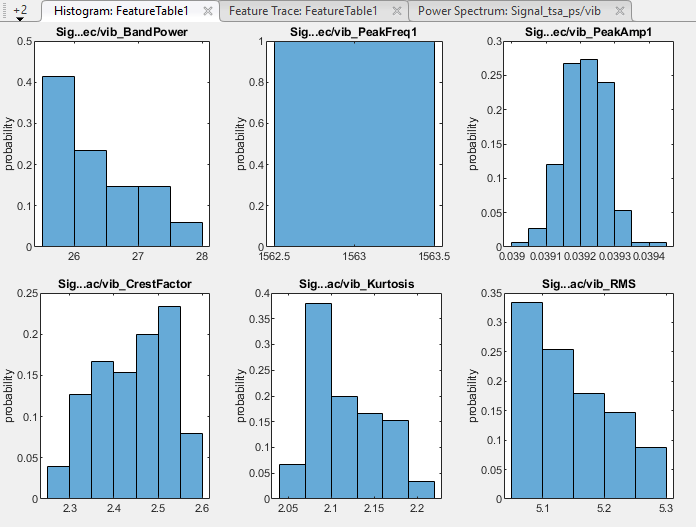
Поскольку переменные условия отсутствуют, в результирующих гистограммах отображается только распределение значений элементов по сегментам.
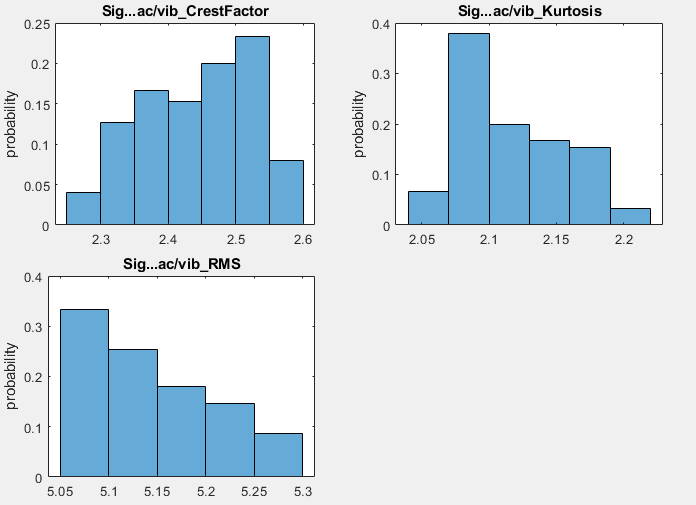
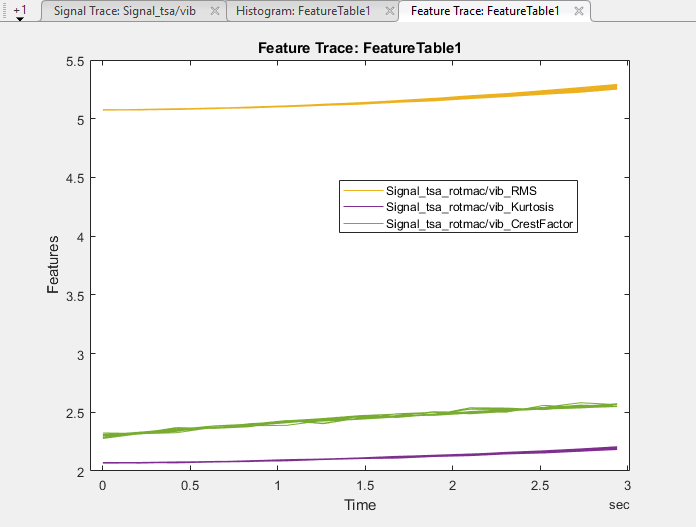
Можно также просмотреть графики трассировки элементов, чтобы увидеть, как элементы изменяются с течением времени. Для этого в окне «Таблицы элементов» выберите FeatureTable1. В галерее печати выберите «Трассировка элементов».
На графике трассировки элементов все три элемента показывают наклон вверх, соответствующий продолжающейся деградации. Значения элементов относительно друг друга не имеют значения, так как элементы представляют различные метрики, которые не нормализованы.
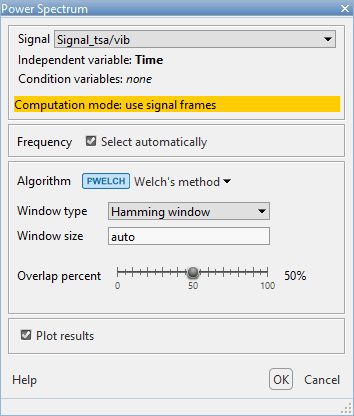
Спектральные характеристики обычно хорошо работают, когда дефект приводит к периодическим колебаниям. Извлеките спектральные характеристики из сигнала TSA. Начните с вычисления спектра мощности. Для этого выберите Спектральная оценка > Спектр мощности. Выберите сигнал TSA и измените алгоритм на Welch's method.
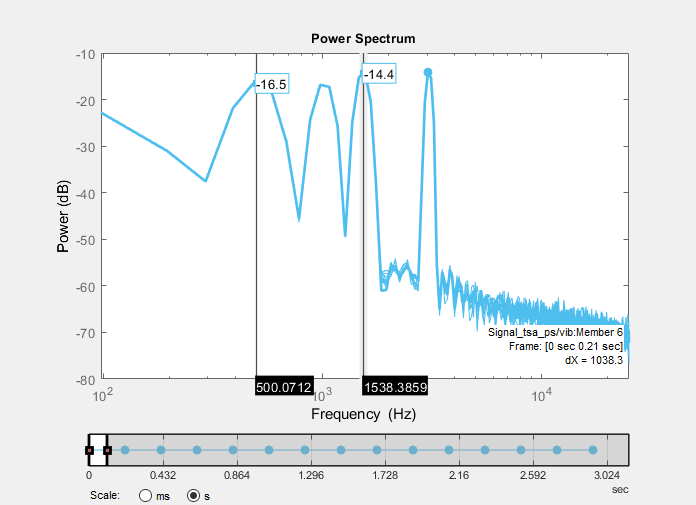
Спектр для первого сегмента включает отдельные пики при приблизительно 500 Гц и 1540 Гц. Частота вращения 1800 об/мин или 30 Гц. Отношения между этими пиковыми частотами приблизительно равны 17 и 51, что соответствует передаточным числам. Промежуточные пики являются дополнительными гармониками этих частот.
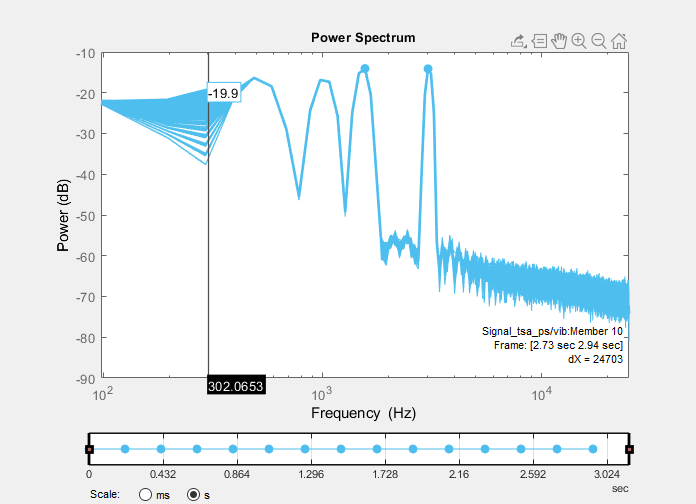
В области порядка и частоты спектры сегментов накладываются друг на друга. Панорамное устройство позволяет выбирать несколько сегментов так же, как и во временной области. Установите панорамирование для покрытия всех сегментов. При увеличении числа сегментов мощность увеличивается на 300 Гц. Эта частота соответствует порядку 10 относительно частоты вращения 30 Гц и представляет увеличивающийся дефект.
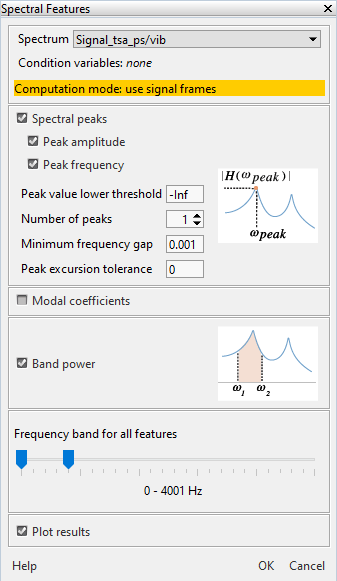
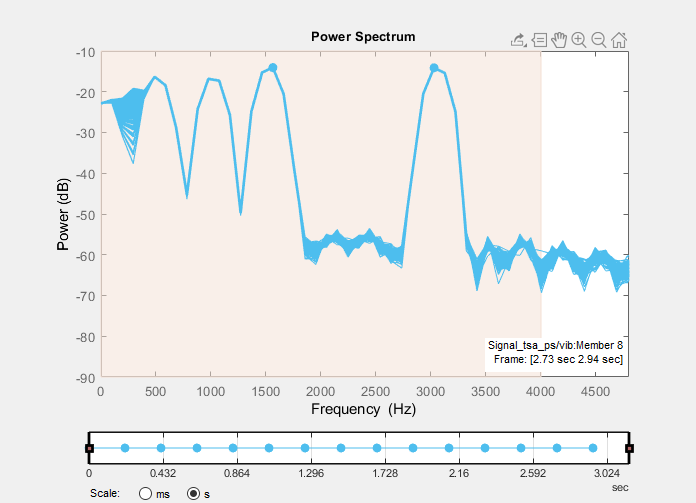
Извлеките спектральные характеристики. Для этого щелкните Спектральные функции (Spectral Features) и подтвердите, что в поле Спектр (Spectrum) установлен спектр мощности. С помощью ползунка ограничьте диапазон примерно 4000 Гц, чтобы связать область с пиками. График энергетического спектра автоматически изменяется с журнала на линейный масштаб и масштабируется до выбранного диапазона.
Полученный график гистограммы теперь включает в себя спектральные признаки.
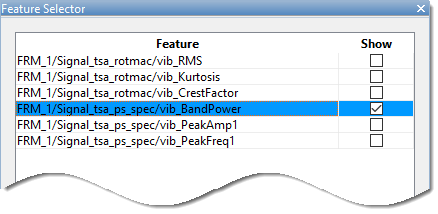
Постройте график зависимости мощности диапазона, чтобы увидеть, как она сравнивается со спектром мощности для всех сегментов. Используйте команду Выбрать элементы (Select Features), чтобы очистить другие трассировки элементов.
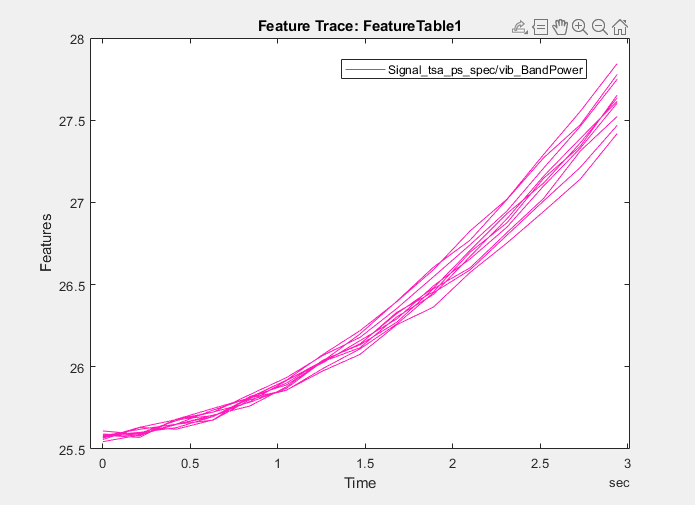
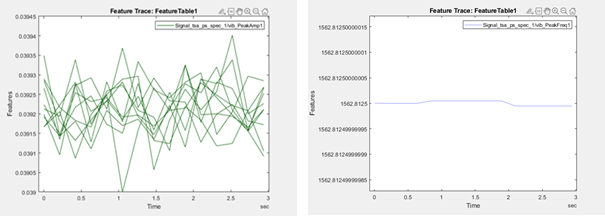
Функция полосовой мощности фиксирует прогрессию дефектов в каждой машине. Следы двух других спектральных признаков не отслеживают прогрессирование дефекта.
Ранжируйте функции, чтобы увидеть, какие из них лучше всего подходят для прогнозирования RUL. Приложение предоставляет три прогностических метода ранжирования:
Монотонность характеризует тенденцию того или иного признака по мере развития системы к отказу. По мере постепенного приближения системы к отказу подходящий индикатор состояния имеет монотонный положительный или отрицательный тренд. Дополнительные сведения см. в разделе monotonicity.
Изменчивость обеспечивает меру сходства между траекториями элемента, измеренными в нескольких экспериментах от пробега до сбоя. Изменчивость индикатора условия-кандидата определяется как наименьшая абсолютная корреляция между измерениями. Дополнительные сведения см. в разделе trendability.
Прогнозируемость - мера изменчивости признака при отказе относительно диапазона между его начальным и конечным значениями. Более прогнозируемый признак имеет меньшую вариацию при отказе относительно диапазона между его начальным и конечным значениями. Дополнительные сведения см. в разделе prognosability.
Щелкните Ранговые характеристики (Rank Features) и выберите FeatureTable1. Поскольку у вас нет переменных условий, приложение по умолчанию использует методику прогностического ранжирования Monotonicity.
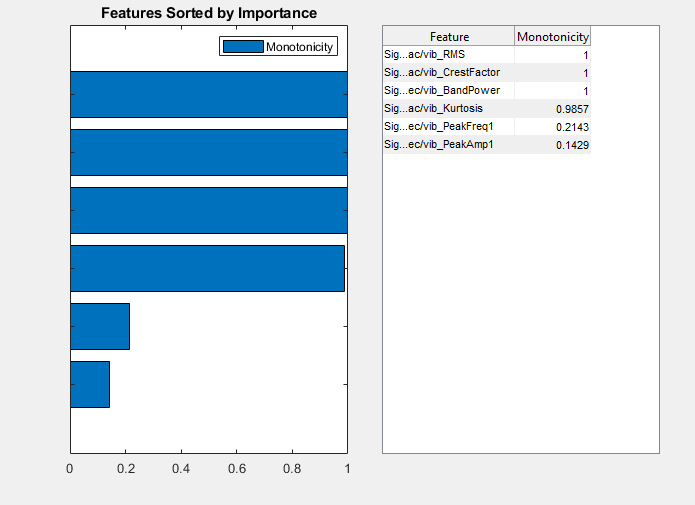
Четыре из этих функций оцениваются по максимуму или близко к нему. Две функции, PeakAmp1 и PeakFreq1, имеют значительно более низкие баллы.
Добавьте рейтинг для двух других прогностических методов. Щелкните Прогностическое ранжирование и выберите Trendability. Щелкните Применить (Apply), а затем Закрыть (Close) Изменчивость (Trend
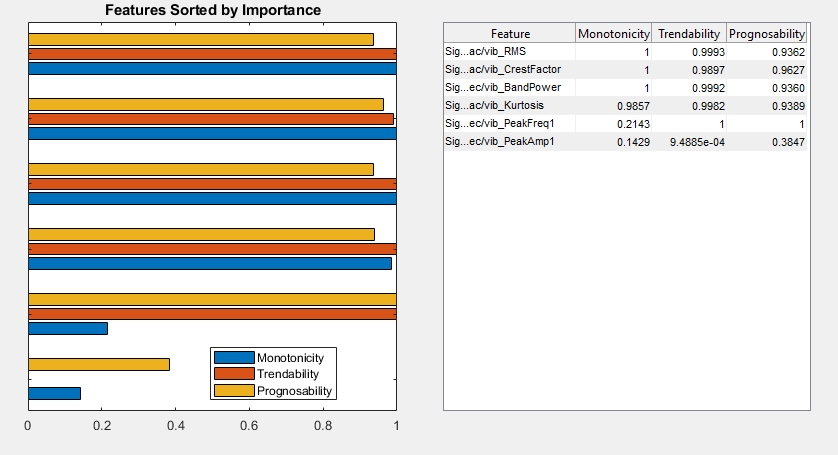
Повторить предыдущий шаг для Prognosability. Теперь график ранжирования содержит результаты всех трех методов ранжирования.
Результаты ранжирования согласуются с трассировками элементов, нанесенными на график в разделе Извлечение спектральных элементов.
Функции, отслеживающие ухудшение неисправности, имеют высокие оценки для Monotonicity. Эти особенности также имеют высокие оценки для двух других методов.
PeakFreq1, который имеет второе наименьшее ранжирование Monotonicity балл, имеет высокие баллы для обоих Trendability и Prognosability. Эти высокие оценки обусловлены тесным согласованием траекторий признаков и низкой изменчивостью в конце моделирования, где разлом является наибольшим.
PeakAmp1 имеет низкие баллы для всех рейтингов, отражающие как нечувствительность этой функции к прогрессии дефекта, так и изменение значений машины для этой функции.
Поскольку у вас есть четыре функции, которые были хорошо оценены во всех категориях, выберите эти функции в качестве набора функций для продвижения вперед в алгоритме RUL.
Конструктор диагностических функций | monotonicity | prognosability | trendability
