Угол выпаса надводной цели
grazAng = grazingang(H,R)
grazAng = grazingang(H,R,MODEL)
grazAng = grazingang(H,R,MODEL,Re)
grazAng = grazAng = grazingang(___,'TargetHeight',TGTHT)
grazAng = grazingang(H,R)H метров над поверхностью, до надводных целей R в метрах. Расчет предполагает криволинейную модель земли с эффективным радиусом земли, приблизительно в 4/3 раза превышающим действительный радиус земли.
grazAng = grazingang(H,R,MODEL)MODEL является либо 'Flat' или 'Curved'.
grazAng = grazingang(H,R,MODEL,Re)MODEL является 'Flat', функция игнорирует Re.
grazAng = grazAng = grazingang(___,'TargetHeight',TGTHT)TGTHT над поверхностью в виде скаляра или вектора. Если какая-либо комбинация ht, R, и TGTHT являются векторами, то размеры должны быть равны. R должно быть больше или равно абсолютному значению разности HT и TGTHT.
|
Высота датчика над поверхностью, в метрах. Этот аргумент может быть скаляром или вектором. Если оба |
|
Расстояние в метрах от датчика до надводной цели. Этот аргумент может быть скаляром или вектором. Если оба |
|
Модель Земли, как одна из | По умолчанию: |
|
Эффективный радиус земли в метрах. Этот аргумент должен быть положительным скалярным значением. Можно использовать По умолчанию: |
|
Высота цели над поверхностью, заданная как скаляр или вектор. Если какая-либо комбинация По умолчанию: |
|
Угол выпаса, в градусах. Размер |
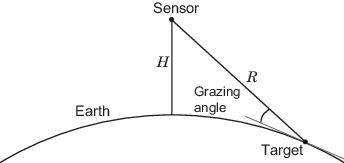
Угол выпаса - это угол между линией от датчика до поверхностной цели и касательной к земле в месте этой цели.
Для модели искривленной земли с эффективным радиусом земли Re угол выпаса составляет:
R22RRe)
Для модели плоской земли угол выпаса составляет:
HR)
[1] Лонг, Морис У. Радиолокационная отражательная способность Земли и моря, 3-й ред. Бостон: Artech House, 2001.
[2] Уорд, J. «Пространственно-временная адаптивная обработка для бортовых радиолокационных систем данных», Технический отчет 1015, Лаборатория Линкольна, MIT, декабрь 1994.
