Узнайте о функциональном поведении примерной модели.
Узнайте о роли примера тестового электрического жгута и его компонентах.
Выполните тесты моделирования для модели.
Возможность открывать и изменять модели и подсистемы Simulink ®.
Понимание подсистем и способов просмотра сведений о подсистемах.
Понимание ссылочных моделей и способов просмотра сведений о ссылочных моделях.
Возможность установки параметров конфигурации модели.
Прежде чем использовать каждый файл модели, поместите копию в доступное для записи расположение и добавьте ее в путь MATLAB.
rtwdemo_throttlecntrl файл модели
rtwdemo_throttlecntrl_testharness файл модели
В этом примере используется простая, но функционально полная модель контроллера дросселя. Модель имеет избыточные алгоритмы управления. Модель выделяет стандартную структуру модели и набор основных блоков в проекте алгоритма.
Открытый rtwdemo_throttlecntrl и сохраните копию как throttlecntrl в доступном для записи расположении на пути MATLAB.
Примечание
В этой модели используется программное обеспечение Stateflow ®.
Верхний уровень модели состоит из следующих элементов:
| Подсистемы | PI_ctrl_1PI_ctrl_2Define_Throt_ParamPos_Command_Arbitration |
| Вход верхнего уровня | pos_rqstfbk_1fbk_2 |
| Выходные данные верхнего уровня | pos_cmd_onepos_cmd_twoThrotComm1 |
| Маршрутизация сигналов | |
| Пропускают блоки, изменяющие значение сигнала, например Sum и Integrator |
Компоновка использует базовый архитектурный стиль для моделей:
Разделение расчетов от маршрутизации сигналов (линии и шины)
Разделение на подсистемы
Этот стиль можно применить к широкому кругу моделей.
Изучите две подсистемы в верхней модели.
Если он еще не открыт, откройте throttlecntrl.
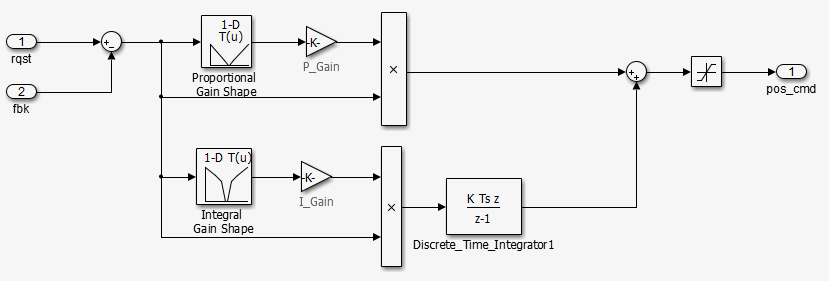
Две подсистемы в верхней модели представляют собой пропорционально-интегральные (PI) контроллеры, PI_ctrl_1 и PI_ctrl_2. На данном этапе эти идентичные подсистемы используют идентичные данные.
Откройте окно PI_ctrl_1 подсистема.
Контроллеры PI в модели принадлежат библиотеке, группе связанных блоков или моделей для повторного использования. Библиотеки предоставляют один из двух методов включения и повторного использования моделей. Второй метод, ссылка на модель, описан в разделе Среда тестирования моделирования (Simulation Test Environment). Нельзя редактировать блок, добавляемый в модель из библиотеки. Отредактируйте блок в библиотеке таким образом, чтобы экземпляры блока в различных моделях оставались согласованными.
Откройте окно Pos_Command_Arbitration подсистема. Эта диаграмма Stateflow выполняет базовую проверку ошибок для двух командных сигналов. Если командные сигналы находятся слишком далеко друг от друга, диаграмма Stateflow устанавливает выходной сигнал в fail_safe позиция.
Закрыть throttlecntrl.
Чтобы проверить алгоритм контроллера дроссельной заслонки, включите его в тестовый жгут. Тестовый жгут - это модель, которая оценивает алгоритм управления и предлагает следующие преимущества:
Отделяет тестовые данные от алгоритма управления.
Отделяет установку или модель обратной связи от алгоритма управления.
Предоставляет среду многократного использования для нескольких версий алгоритма управления.
Модель тестового кабеля для этого примера реализует общую среду имитационного тестирования, состоящую из следующих частей:
Испытываемый блок
Источник тестового вектора
Оценка и ведение журнала
Установка или система обратной связи
Масштабирование ввода и вывода
Изучите среду тестирования моделирования.
Открытие модели тестового электрического жгута rtwdemo_throttlecntrl_testharness и сохраните копию как throttlecntrl_testharness в доступном для записи расположении на пути MATLAB.
Настройте throttlecntrl модель в качестве алгоритма управления тестовым жгутом.
Откройте окно Unit_Under_Test блокировать и просматривать алгоритм управления.
Просмотрите параметры привязки модели, щелкнув правой кнопкой мыши значок Unit_Under_Test и выберите Параметры блока (Model Reference).
rtwdemo_throttlecntrl отображается как имя ссылочной модели.
Изменение значения имени модели на throttlecntrl.
Обновите схему модели тестового кабеля, щелкнув Моделирование > Обновить схему.
Алгоритм управления - тестируемый блок, обозначаемый наименованием блока Model, Unit_Under_Test.
Блок «Модель» предоставляет метод повторного использования компонентов. Из верхней модели она позволяет ссылаться на другие модели (прямо или косвенно) как на скомпилированные функции. По умолчанию программа Simulink перекомпилирует модель при изменении ссылочных моделей. Скомпилированные функции имеют следующие преимущества перед библиотеками:
Время моделирования для больших моделей увеличивается.
Можно непосредственно моделировать скомпилированные функции.
Для моделирования требуется меньше памяти. В памяти находится только одна копия скомпилированной модели, даже если на модель ссылаются несколько раз.
Откройте источник тестового вектора, реализованный в этом тестовом жгуте как Test_Vectors подсистема.
Подсистема использует блок построителя сигналов для источника тестового вектора. Блок содержит данные, управляющие моделированием (PosRequest) и предоставляет ожидаемые результаты, используемые Verification подсистема. В этом примере тестовый жгут использует только один набор тестовых данных. Как правило, необходимо создать набор тестов, полностью выполняющий требования системы.
Откройте подсистему оценки и регистрации, реализованную в этом тестовом жгуте как подсистема Verification.
Тестовый жгут сравнивает результаты моделирования алгоритма управления с золотыми данными - результаты тестирования, которые демонстрируют желаемое поведение алгоритма управления, сертифицированное экспертом. В Verification подсистема, блок Assertion сравнивает моделируемое положение дроссельной заслонки от установки с золотым значением от тестового жгута. Если разность между этими двумя сигналами превышает 5%, тест завершается неуспешно, и блок подтверждения останавливает моделирование.
Кроме того, можно проанализировать данные моделирования после того, как моделирование завершит выполнение. Выполните оценку с помощью сценариев MATLAB ® или сторонних инструментов. Оценка после исполнения обеспечивает большую гибкость при анализе данных. Однако требуется дождаться завершения выполнения. Объединение этих двух методов может обеспечить очень гибкую и эффективную среду тестирования.
Откройте установку или систему обратной связи, реализованную в этом тестовом жгуте как Plant подсистема.
Plant подсистема моделирует динамику дросселя с передаточной функцией в каноническом виде. Можно создавать модели растений с различными уровнями точности. На различных этапах тестирования обычно используются различные модели растений.
Откройте подсистемы масштабирования ввода и вывода, реализованные в этом тестовом жгуте как Input_Signal_Scaling и Output_Signal_Scaling.

Подсистемы масштабирования ввода и вывода выполняют следующие основные функции:
Выберите входные сигналы для направления к контролируемому блоку.
Выберите выходные сигналы для маршрутизации на завод.
Перепродайте сигналы между техническими блоками и блоками, которые могут быть записаны для тестируемого блока.
Управляйте переходами скоростей между установкой и проверяемым блоком.
Сохранить и закрыть throttlecntrl_testharness.
Убедитесь, что для рабочей папки установлена папка с возможностью записи, например папка, в которую помещены копии файлов модели.
Откройте копию модели тестового электрического жгута, throttlecntrl_testharness.
Запустите моделирование модели тестового электрического жгута. После завершения моделирования появятся следующие результаты.
Нижний правый график показывает разницу между ожидаемым (золотым) положением дросселя и положением дросселя, которое вычисляет установка. Если разница между этими двумя значениями больше ± 0,05, моделирование прекращается.
Сохранение и закрытие моделей контроллера дроссельной заслонки и тестовых кабелей.
Архитектура базовой модели отделяет вычисления от маршрутизации сигналов и разделяет модель на подсистемы
Два варианта повторного использования модели включают библиотеки блоков и ссылки на модели.
Если алгоритм управления в тестовом кабеле представлен как блок модели, укажите имя модели алгоритма управления в диалоговом окне Параметры привязки модели (Model Reference Parameters).
Тестовый электрический жгут - это модель, которая оценивает алгоритм управления. Обычно жгут состоит из тестируемого блока, источника тестового вектора, оценки и регистрации, установки или системы обратной связи, а также компонентов масштабирования ввода и вывода.
Тестируемый блок является тестируемым алгоритмом управления.
Источник тестового вектора предоставляет данные, которые управляют моделированием, которое генерирует результаты, используемые для проверки.
Во время проверки тестовый жгут сравнивает результаты моделирования алгоритма управления с золотыми данными и регистрирует результаты.
Растение или компонент обратной связи тестового электрического жгута моделирует контролируемую среду.
При разработке тестового жгута,
Масштабирование входных и выходных компонентов.
Выберите входные сигналы для направления к контролируемому блоку.
Выберите выходные сигналы для маршрутизации на завод.
Перепродайте сигналы между техническими блоками и блоками, которые могут быть записаны для тестируемого блока.
Управляйте переходами скоростей между установкой и проверяемым блоком.
Перед запуском моделирования или завершением проверки рекомендуется проверить модель с помощью Model Advisor.
