Расстояние между сигналами с использованием динамического искажения времени
dist = dtw(x,y)x и y, на общий набор моментов, таких, что dist, сумма евклидовых расстояний между соответствующими точками, является наименьшей. Чтобы растянуть входные данные, dtw повторяет каждый элемент x и y столько раз, сколько необходимо. Если x и y являются матрицами, то dist растягивает их, повторяя их столбцы. В этом случае x и y должно иметь одинаковое количество строк.
[ возвращает общий набор моментов, или путь деформации, такой, что dist,ix,iy] = dtw(x,y)x(ix) и y(iy) имеют наименьшее возможное dist между ними.
Векторы ix и iy имеют одинаковую длину. Каждая содержит монотонно возрастающую последовательность, в которой индексы к элементам соответствующего сигнала, x или y, повторяются необходимое количество раз.
Когда x и y - матрицы, ix и iy таковы, что x(:,ix) и y(:,iy) минимально разделены.
dtw(___) без выходных аргументов строит график исходного и выровненного сигналов.
Если сигналы являются действительными векторами, функция отображает два исходных сигнала на субплоте и выровненные сигналы на субплоте ниже первого.
Если сигналы являются комплексными векторами, функция отображает исходные и выровненные сигналы на трехмерных графиках.
Если сигналы являются вещественными матрицами, функция использует imagesc для отображения исходного и выровненного сигналов.
Если сигналы представляют собой комплексные матрицы, функция строит график их действительной и мнимой частей в верхней и нижней половине каждого изображения.
Генерируют два реальных сигнала: чирп и синусоида.
x = cos(2*pi*(3*(1:1000)/1000).^2); y = cos(2*pi*9*(1:399)/400);
Используйте динамическую деформацию по времени для выравнивания сигналов таким образом, чтобы сумма евклидовых расстояний между их точками была наименьшей. Отображение выровненных сигналов и расстояния.
dtw(x,y);

Измените частоту синусоиды в два раза больше ее начального значения. Повторите вычисления.
y = cos(2*pi*18*(1:399)/400); dtw(x,y);

Добавьте мнимую часть к каждому сигналу. Восстановите начальную частоту синусоиды. Используйте динамическую временную деформацию для выравнивания сигналов путем минимизации суммы возведенных в квадрат евклидовых расстояний.
x = exp(2i*pi*(3*(1:1000)/1000).^2);
y = exp(2i*pi*9*(1:399)/400);
dtw(x,y,'squared');
Разработайте шрифт, напоминающий выходные данные ранних компьютеров. Используйте его для записи слова MATLAB ®.
chr = @(x)dec2bin(x')-48; M = chr([34 34 54 42 34 34 34]); A = chr([08 20 34 34 62 34 34]); T = chr([62 08 08 08 08 08 08]); L = chr([32 32 32 32 32 32 62]); B = chr([60 34 34 60 34 34 60]); MATLAB = [M A T L A B];
Повреждайте слово, повторяя случайные столбцы букв и изменяя интервал. Отображение исходного слова и трех поврежденных версий. Сбросьте генератор случайных чисел для воспроизводимых результатов.
rng('default') c = @(x)x(:,sort([1:6 randi(6,1,3)])); subplot(4,1,1,'XLim',[0 60]) spy(MATLAB) xlabel('') ylabel('Original') for kj = 2:4 subplot(4,1,kj,'XLim',[0 60]) spy([c(M) c(A) c(T) c(L) c(A) c(B)]) xlabel('') ylabel('Corrupted') end

Создайте еще две поврежденные версии слова. Выровняйте их с помощью динамического искажения по времени.
one = [c(M) c(A) c(T) c(L) c(A) c(B)]; two = [c(M) c(A) c(T) c(L) c(A) c(B)]; [ds,ix,iy] = dtw(one,two); onewarp = one(:,ix); twowarp = two(:,iy);
Отображение неориентированных и выровненных слов.
figure subplot(4,1,1) spy(one) xlabel('') ylabel('one') subplot(4,1,2) spy(two,'r') xlabel('') ylabel('two') subplot(4,1,3) spy(onewarp) xlabel('') ylabel('onewarp') subplot(4,1,4) spy(twowarp,'r') xlabel('') ylabel('twowarp')

Повторите вычисления, используя встроенные функциональные возможности dtw.
dtw(one,two);

Генерировать два сигнала, состоящих из двух различных пиков, разделенных впадинами разной длины. Постройте график сигналов.
x1 = [0 1 0 0 0 0 0 0 0 0 0 1 0]*.95; x2 = [0 1 0 1 0]*.95; subplot(2,1,1) plot(x1) xl = xlim; subplot(2,1,2) plot(x2) xlim(xl)

Выровняйте сигналы без ограничений на пути деформации. Чтобы обеспечить идеальное выравнивание, функция должна повторять только одну выборку более короткого сигнала.
figure dtw(x1,x2);

Постройте график пути деформации и прямой посадки между двумя сигналами. Для достижения выравнивания функция щедро расширяет желоб между пиками.
[d,i1,i2] = dtw(x1,x2);
figure
plot(i1,i2,'o-',[i1(1) i1(end)],[i2(1) i2(end)])
Повторите вычисления, но теперь ограничьте траекторию деформации отклонением максимум трех элементов от прямолинейной посадки. Постройте график растянутых сигналов и траектории деформации.
[dc,i1c,i2c] = dtw(x1,x2,3); subplot(2,1,1) plot([x1(i1c);x2(i2c)]','.-') title(['Distance: ' num2str(dc)]) subplot(2,1,2) plot(i1c,i2c,'o-',[i1(1) i1(end)],[i2(1) i2(end)])

Ограничение исключает чрезмерную концентрацию деформации на небольшом подмножестве образцов за счет качества выравнивания. Повторите расчет с ограничением в один образец.
dtw(x1,x2,1);

Загрузите речевой сигнал, дискретизированный при 7418 Гц. Файл содержит запись женского голоса, говорящего слово «MATLAB ®».
load mtlb % To hear, type soundsc(mtlb,Fs)
Извлеките два сегмента, которые соответствуют двум экземплярам//фонемы. Первый происходит приблизительно между 150 мс и 250 мс, а второй - между 370 мс и 450 мс.
a1 = mtlb(round(0.15*Fs):round(0.25*Fs)); a2 = mtlb(round(0.37*Fs):round(0.45*Fs)); subplot(2,1,1) plot((0:numel(a1)-1)/Fs+0.15,a1) title('a_1') subplot(2,1,2) plot((0:numel(a2)-1)/Fs+0.37,a2) title('a_2') xlabel('Time (seconds)')

% To hear, type soundsc(a1,Fs), pause(1), soundsc(a2,Fs)Деформируйте временные оси так, чтобы евклидово расстояние между сигналами было сведено к минимуму. Вычислите общую «длительность» искаженных сигналов и постройте их график.
[d,i1,i2] = dtw(a1,a2); a1w = a1(i1); a2w = a2(i2); t = (0:numel(i1)-1)/Fs; duration = t(end)
duration = 0.1297
subplot(2,1,1) plot(t,a1w) title('a_1, Warped') subplot(2,1,2) plot(t,a2w) title('a_2, Warped') xlabel('Time (seconds)')

% To hear, type soundsc(a1w,Fs), pause(1), sound(a2w,Fs)Повторите эксперимент с полным словом. Загрузите файл, содержащий слово, «сильное», произнесенное женщиной и мужчиной. Сигналы выбраны на уровне 8 кГц.
load('strong.mat') % To hear, type soundsc(her,fs), pause(2), soundsc(him,fs)
Деформировать временные оси так, чтобы абсолютное расстояние между сигналами было сведено к минимуму. Постройте график исходных и преобразованных сигналов. Вычислите общую деформированную «длительность».
dtw(her,him,'absolute'); legend('her','him')

[d,iher,ihim] = dtw(her,him,'absolute');
duration = numel(iher)/fsduration = 0.8394
% To hear, type soundsc(her(iher),fs), pause(2), soundsc(him(ihim),fs)Файлы MATLAB1.gif и MATLAB2.gif содержат два рукописных образца слова «MATLAB ®». Загрузите файлы и выровняйте их по оси X с помощью динамического временного искажения.
samp1 = 'MATLAB1.gif'; samp2 = 'MATLAB2.gif'; x = double(imread(samp1)); y = double(imread(samp2)); dtw(x,y);

Два сигнала с эквивалентными признаками, расположенные в одном и том же порядке, могут казаться очень разными из-за различий в длительности их сечений. Динамическое искажение по времени искажает эти длительности так, что соответствующие признаки появляются в одном и том же месте на общей оси времени, тем самым выделяя сходства между сигналами.
Рассмотрим два K-мерных сигнала
и
которые имеют M и N образцов соответственно. Учитывая dmn (X, Y), расстояние между m-м образцом X и n-м образцом Y, указанным вmetric, dist растягивает X и Y на общий набор моментов, так что измерение глобального расстояния сигнал-сигнал является наименьшим.
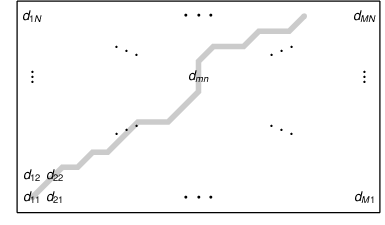
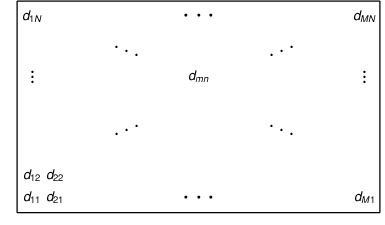
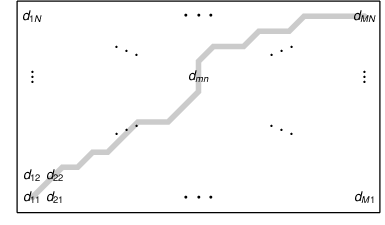
Первоначально функция упорядочивает все возможные значения dmn (X, Y) в решетку вида
Тогда dist ищет путь через решетку, параметризованный двумя последовательностями одинаковой длины,ix и iy- такое, что
Y)
минимально. Приемлемый dist пути начинаются на d11 (X, Y), заканчиваются на dMN (X, Y) и представляют собой комбинации ходов «шахматного короля»:
Вертикальные перемещения: (m, n ) → ( m + 1, n)
Горизонтальные перемещения: (m, n ) → (m, n + 1)
Диагональные ходы: (м, н ) → ( м + 1, н + 1)
Эта структура гарантирует, что любой приемлемый путь выравнивает полные сигналы, не пропускает выборки и не повторяет признаки сигнала. Кроме того, желательный путь проходит близко к диагональной линии, проходящей между d11 (X, Y) и dMN (X, Y). Это дополнительное ограничение, скорректированное maxsamp , гарантирует, что деформация сравнивает сечения одинаковой длины и не переопределяет элементы отклонения.
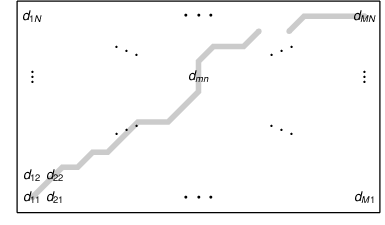
Это возможный путь через решетку:
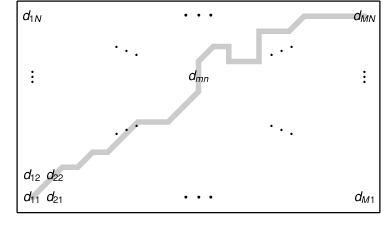
Следующие пути не разрешены:
|
|
|
| Не выравнивает все сигналы | Пропускает образцы | Возврат к самому себе, повторяя элемент |
[1] Паливал, К. К., Анант Агарвал и Сарваджит С. Синха. «Модификация алгоритма динамического искажения времени Сакоэ и Тибы для изолированного распознавания слов». Обработка сигналов. т. 4, 1982, стр. 329-333.
[2] Сакоэ, Хироаки и Сейби Тиба. «Оптимизация алгоритма динамического программирования для распознавания разговорных слов». Транзакции IEEE ® для обработки акустики, речи и сигналов. т. ASSP-26, № 1, 1978, стр. 43-49.
alignsignals | edr | finddelay | findsignal | xcorr