Автомобили используют электронику для операций управления, таких как:
Открытие и закрытие окон и люков
Регулировка зеркал и фар
Запирание и отпирание дверей
На эти системы накладываются строгие эксплуатационные ограничения. Сбои могут вызвать опасные и, возможно, опасные для жизни ситуации. В результате перед развертыванием требуется тщательная разработка и анализ.
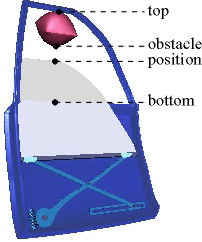
Этот пример фокусируется на конструкции силовой оконной системы автомобиля, в частности окна со стороны пассажира. Критическим аспектом этой системы является то, что она не может оказывать силу более 100 Н на объект, когда окно закрывается. Когда система обнаруживает такой объект, она должна опустить окно примерно на 10 см.
В рамках процесса проектирования в примере рассматривается следующее:
Количественные требования к системе управления окном, такие как требования к времени и силе
Требования к системе, отраженные в схемах деятельности
Определения данных для сигналов, используемых в диаграммах деятельности
Другие аспекты процесса конструирования, содержащиеся в этом примере:
Управление компонентами системы
Построение модели
Проверка результатов моделирования системы
Создание кода
Помимо Simulink в этом примере используются следующие дополнительные продукты MathWorks ®:
Toolbox™ системы DSP
Designer™ с фиксированной точкой
Simscape™ Multibody™
Симскейп Electrical™
Simscape
Simulink ® 3D Animation™
Симулинк Real-Time™
Симулинк Coverage™
Поток данных Stateflow ®
Количественные требования к контролю:
Окно должно полностью открываться и полностью закрываться в течение 4 с.
Если вверх выдается в течение от 200 мс до 1 с, окно должно полностью открыться. Если команда down выдается в течение от 200 мс до 1 с, окно должно быть полностью закрыто.
Окно должно начать движение через 200 мс после ввода команды.
Сила обнаружения, когда объект присутствует, составляет менее 100 Н.
При закрытии окна, если на пути находится объект, прекратите закрывать окно и опустите окно примерно на 10 см.
Диаграммы операций помогают графически зафиксировать спецификацию и понять, как работает система. Иерархическая структура помогает анализировать даже большие системы. На верхнем уровне контекстная диаграмма описывает системную среду и ее взаимодействие с исследуемой системой с точки зрения операций обмена данными и управления. Затем можно разложить систему на схему операций с процессами и контрольными спецификациями (CSPEC).
Процессы управляют иерархической декомпозицией. Каждый процесс задается с помощью другой диаграммы задач или примитивной спецификации (PSPEC). Можно указать PSPEC в ряде представлений с формальной семантикой, таких как блок-схема Simulink. Кроме того, контекстные диаграммы графически отражают контекст работы системы.
На рисунке представлена схема контекста системы окна питания. Квадратные ящики захватывают окружающую среду, в данном случае водителя, пассажира и окно. И водитель, и пассажир могут посылать в окно команды на его перемещение вверх и вниз. Контроллер вырабатывает правильную команду для передачи в оконный исполнительный механизм (например, команда водителя имеет приоритет над командой пассажира). Кроме того, схема контролирует состояние оконной системы, чтобы установить, когда окно полностью открыто и закрыто, и определить, имеется ли объект между окном и рамой.
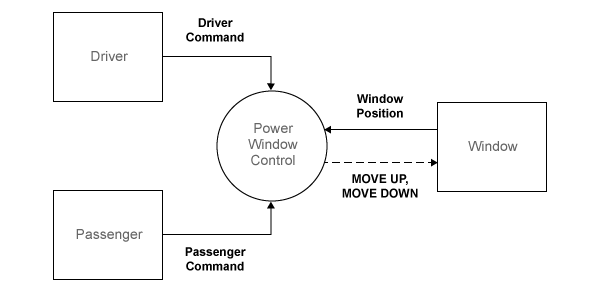
Круг (также известный как пузырь) представляет контроллер окна питания. Круг является графическим обозначением для процесса. Процессы фиксируют преобразование входных данных в выходные данные. Примитивный процесс также может генерироваться. CSPEC обычно состоят из комбинационной или последовательной логики для вывода выходных управляющих сигналов из входного управления.
Сведения о реализации в среде Simulink см. в разделе Реализация контекстной схемы: Система окон питания.
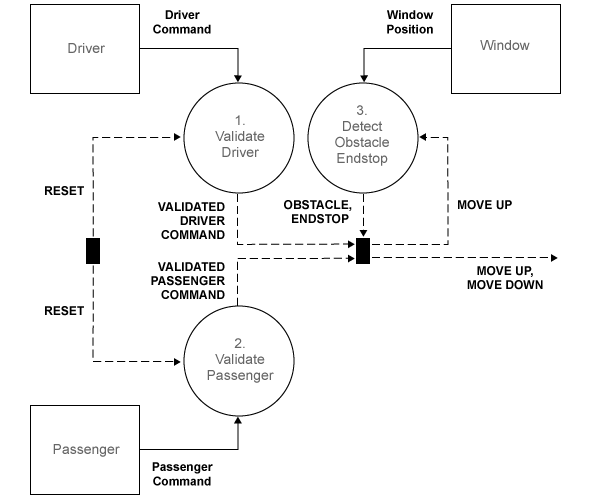
Управление окном питания состоит из трех процессов и CSPEC. Два процесса позволяют удостовериться в том, что вход водителя и пассажира является значимым с учетом состояния системы. Например, если окно открыто полностью, MOVE DOWN команда не имеет смысла. Оставшийся процесс определяет, полностью ли открыто или полностью закрыто окно и присутствует ли объект. CSPEC принимает управляющие сигналы и определяет, следует ли перемещать окно вверх или вниз (например, если объект присутствует, окно перемещается вниз примерно на одну секунду или до тех пор, пока оно не достигнет конечной точки).
Сведения о реализации в среде Simulink см. в разделе Реализация схемы операций: Управление окном питания.
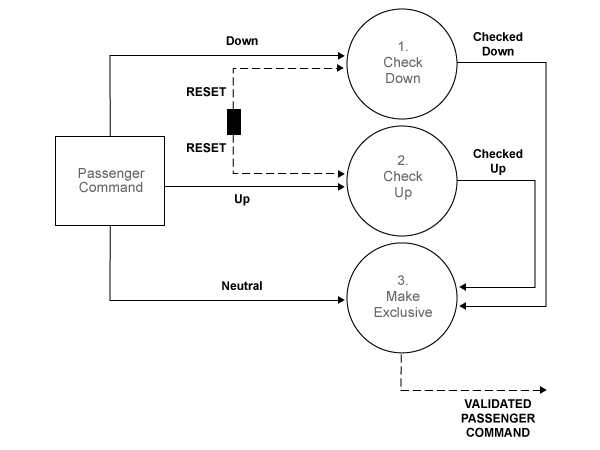
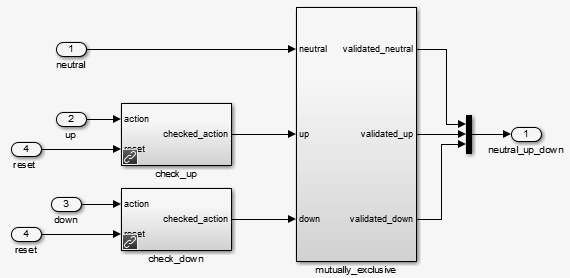
Каждый процесс в диаграмме действий VALIDATE DRIVER является примитивным и определяется следующим PSPEC. В документе MAKE EXCLUSIVE PSPEC по соображениям безопасности DOWN имеет приоритет над командой UP команда.
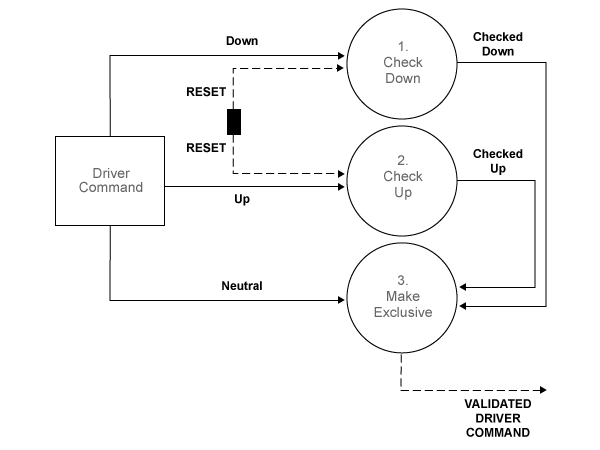
PSPEC 1.1.1: CHECK DOWN CHECKED_DOWN = DOWN and not RESET
PSPEC 1.1.2: CHECK UP CHECKED_UP = UP and not RESET
PSPEC 1.1.3: MAKE EXCLUSIVE
VALIDATED_DOWN = CHECKED_DOWN
VALIDATED_UP = CHECKED_UP and not CHECKED_DOWN
VALIDATED_NEUTRAL = (NEUTRAL and not (CHECKED_UP and not CHECKED_DOWN))
or not (CHECKED_UP or CHECKED_DOWN)Сведения о реализации в среде Simulink см. в разделе Реализация схемы действий: проверка.
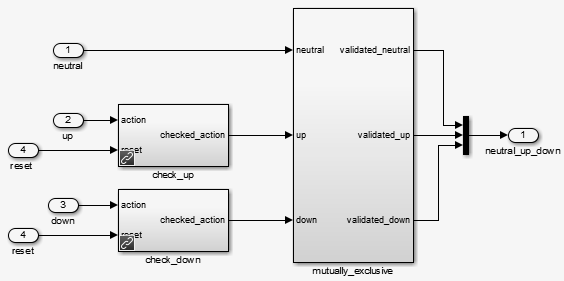
Внутренние компоненты процесса VALIDATE PASSENGER аналогичны процессу VALIDATE DRIVER. Единственным отличием являются различные входные и выходные данные.
PSPEC 1.2.1: CHECK DOWN CHECKED_DOWN = DOWN and not RESET
PSPEC 1.2.2: CHECK UP CHECKED_UP = UP and not RESET
PSPEC 1.2.3: MAKE EXCLUSIVE
VALIDATED_DOWN = CHECKED_DOWN
VALIDATED_UP = CHECKED_UP and not CHECKED_DOWN
VALIDATED_NEUTRAL = (NEUTRAL and not (CHECKED_UP and not CHECKED_DOWN))
or not (CHECKED_UP or CHECKED_DOWN)Сведения о реализации в среде Simulink см. в разделе Схема действий: Проверка пассажира.
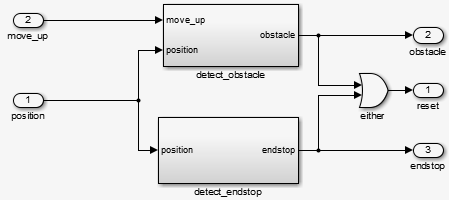
Третий процесс на диаграмме активности POWER WINDOW CONTROL обнаруживает наличие препятствия или когда окно достигает своего верха или низа (ENDSTOP). Механизм обнаружения основан на токе якоря оконного привода. Во время нормальной работы этот ток находится в определенных пределах. Когда окно достигает своего верха или низа, электродвигатель проводит большой ток (более 15 А или менее -15 А), чтобы попытаться поддерживать свою угловую скорость. Аналогично, при нормальной работе ток составляет около 2 А или -2 А (в зависимости от того, открывается или закрывается окно). При наличии объекта происходит небольшое отклонение от этого значения. Для поддержания силы окна на объекте менее 100 Н регулятор переключается на его аварийную работу при обнаружении тока менее -2,5 А. Эти операции необходимы только при накатывании окна, что соответствует отрицательному току в конкретной проводке данной модели. Схема активности DETECT DISPORDER ENDSTOP воплощает эту функциональность.
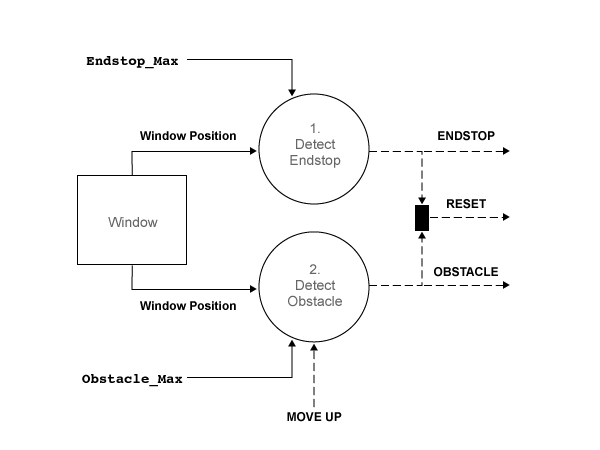
CSPEC 1.3: DETECT OBSTACLE ENDSTOP RESET = OBSTACLE or ENDSTOP
PSPEC 1.3.1: DETECT ENDSTOP ENDSTOP = WINDOW_POSITION > ENDSTOP_MAX
PSPEC 1.3.2: DETECT OBSTACLE OBSTACLE = (WINDOW_POSITION > OBSTACLE_MAX) and MOVE_UP for 500 ms
Сведения о реализации в среде Simulink см. в разделе Схема действий: Обнаружение конца препятствия.
Функциональная декомпозиция однозначно определяет каждый процесс по его декомпозиции или примитивной спецификации (PSPEC). Кроме того, он также должен формально указывать сигналы на диаграммах деятельности. Используйте определения данных для этих спецификаций.
Следующие таблицы являются определениями данных для сигналов, используемых в диаграммах активности.
Для получения информации о связанной схеме действий см. Контекстная диаграмма: Система окна питания.
Контекстная диаграмма: Определения системных данных окна питания
| Сигнал | Тип информации | Непрерывный/ Дискретный | Тип данных | Ценности |
|---|---|---|---|---|
DRIVER_COMMAND | Данные | Дискретный | Совокупность |
|
PASSENGER_COMMAND | Данные | Дискретный | Совокупность |
|
WINDOW_POSITION | Данные | Непрерывный | Реальный | от 0 до 0,4 м |
MOVE_UP | Контроль | Дискретный | Булев |
|
MOVE_DOWN | Контроль | Дискретный | Булев |
|
Для получения информации о связанной схеме действий см. раздел Схема действий: Управление окном питания.
Схема действий: Определения управляющих данных окна управления питанием
| Сигнал | Тип информации | Непрерывный/ Дискретный | Тип данных | Ценности |
|---|---|---|---|---|
DRIVER_COMMAND | Данные | Дискретный | Совокупность |
|
PASSENGER_COMMAND | Данные | Дискретный | Совокупность |
|
WINDOW_POSITION | Данные | Непрерывный | Реальный | от 0 до 0,4 м |
MOVE_UP | Контроль | Дискретный | Булев |
|
MOVE_DOWN | Контроль | Дискретный | Булев |
|
Для получения информации о связанной схеме действий см. раздел Схема действий: Проверка драйвера.
Схема действий: Проверка определений данных драйвера
| Сигнал | Тип информации | Непрерывный/ Дискретный | Тип данных | Ценности |
|---|---|---|---|---|
DRIVER_COMMAND | Данные | Дискретный | Совокупность |
|
PASSENGER_COMMAND | Данные | Дискретный | Совокупность |
|
WINDOW_POSITION | Данные | Непрерывный | Реальный | от 0 до 0,4 м |
MOVE_UP | Контроль | Дискретный | Булев |
|
MOVE_DOWN | Контроль | Дискретный | Булев |
|
Для получения информации о связанной схеме действий см. раздел Схема действий: Проверка пассажира.
Схема действий: Проверка определений данных о пассажирах
| Сигнал | Тип информации | Непрерывный/ Дискретный | Тип данных | Ценности |
|---|---|---|---|---|
НЕЙТРАЛЬНЫЙ | Данные | Дискретный | Булев |
|
Вверх | Данные | Дискретный | Булев |
|
ВНИЗ | Данные | Дискретный | Булев |
|
CHECKED_UP | Данные | Дискретный | Булев |
|
CHECKED_DOWN | Данные | Дискретный | Булев |
|
Для получения информации о связанной схеме действий см. раздел Схема действий: Обнаружение конца препятствия.
Схема действий: Определение данных конечных стоек препятствий
| Сигнал | Тип информации | Непрерывный/ Дискретный | Тип данных | Ценности |
|---|---|---|---|---|
ENDSTOP_MIN | Данные | Постоянный | Реальный | 0,0 м |
ENDSTOP_MAX | Данные | Постоянный | Реальный | 0,4 м |
OBSTACLE_MAX | Данные | Постоянный | Реальный | 0,3 м |
Конструкция модели итерируется при рассмотрении более подробных реализаций. Сведения о том, как модель итерируется при введении дополнительных сведений, см. в разделе Итерация в конструкции.
MATLAB ® и Simulink поддерживают проектирование на основе моделей для встраиваемых систем управления - от первоначальной спецификации до создания кода. Для организации крупных проектов и совместного использования работы с другими пользователями используйте Управление проектами.
В приложении Power Window Control Project показано, как можно использовать инструменты MathWorks и процесс конструирования на основе модели для перехода от концепции к реализации для автомобильной оконной системы. Он использует проекты для организации файлов и других компонентов модели.
Кроме того, в этом примере показано, как связать модели с системной документацией.
Чтобы открыть проект Power Window Controller, в окне команд MATLAB введите:
slexPowerWindowStart
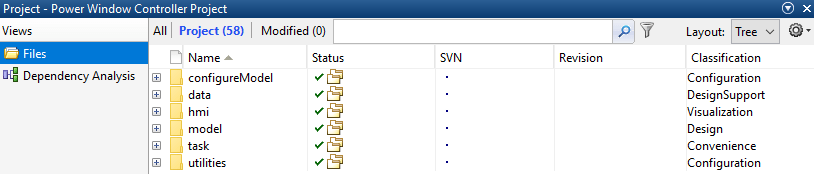
Ознакомьтесь с папками проекта. В частности, обратите внимание на папки задач. Эта папка содержит сценарии, выполняющие частые задачи для модели. Для проекта Power Window Controller выполните следующие действия:
Настройте модель для управления перемещением окна в сети контроллера (CAN).
Настройте модель для использования программного обеспечения Stateflow и Simulink для моделирования реактивного поведения с дискретными событиями и непрерывного временного поведения с помощью модели завода низкого порядка.
Настройте модель с помощью более подробной модели установки, которая включает силовые эффекты в электрической и механической областях. Модель завода проверяет силу, оказываемую окном на захваченный объект.
Настройте модель с моделью, которая включает другие эффекты, которые могут изменить модель, например квантование измерений.
Примечание
Эти сценарии также моделируют модель. Чтобы настроить только модель, см. сценарии в папке configureModel.
Используйте модель увеличения покрытия для создания отчета о покрытии модели.
Раздел «Ярлыки проекта» содержит команды быстрого доступа, которые можно дважды щелкнуть для выполнения общих задач, таких как:
Добавление проектов в пути MATLAB.
Выполните интерактивное тестирование.
Проверка тестирования модели с покрытием модели.
Откройте главную модель.
Моделирование модели с различными конфигурациями.
Создание отчета о покрытии модели для увеличения покрытия модели.
Откройте модель, используемую для увеличения покрытия модели.
В этом разделе описывается высокоуровневая спецификация управления дискретными событиями для управления окном мощности.
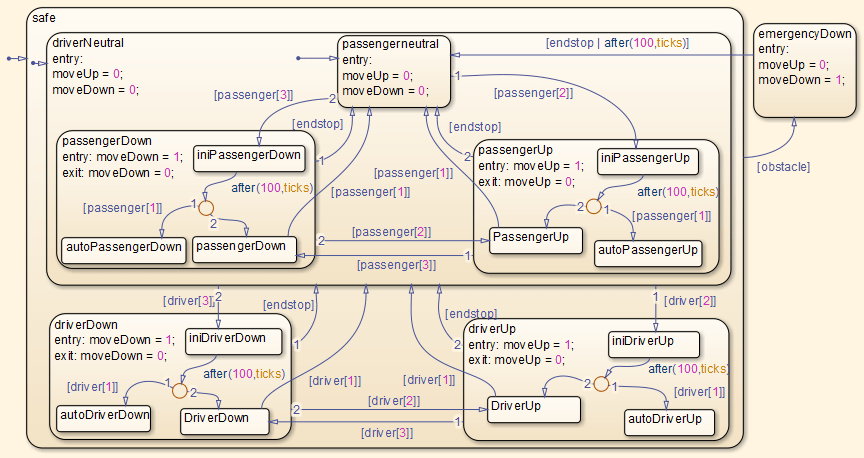
Управление дискретными событиями окна можно моделировать с помощью диаграммы Stateflow. Диаграмма Stateflow - это конечный автомат с иерархией и параллелизмом. Этот конечный автомат содержит основные состояния системы окна питания: up, auto-up, down, auto-down, rest и emergency. Он моделирует переходы состояний и учитывает приоритет команд водителя над командами пассажира. Это также включает аварийное поведение, которое активируется, когда программное обеспечение обнаруживает объект между окном и рамкой при движении вверх.
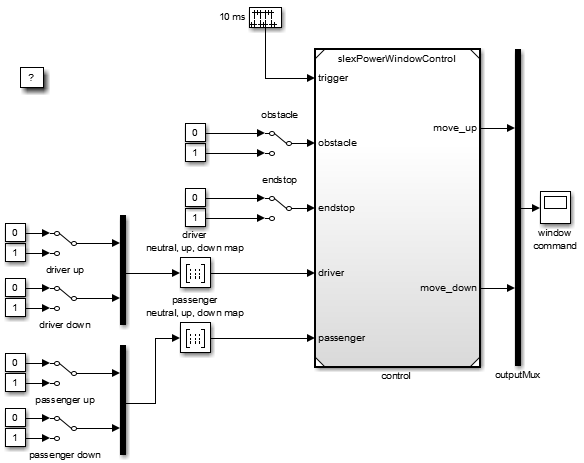
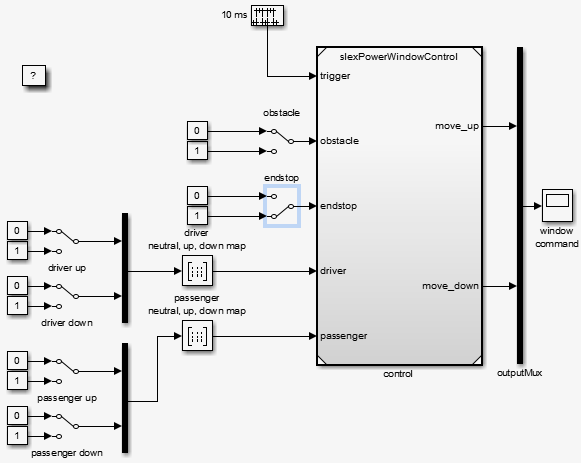
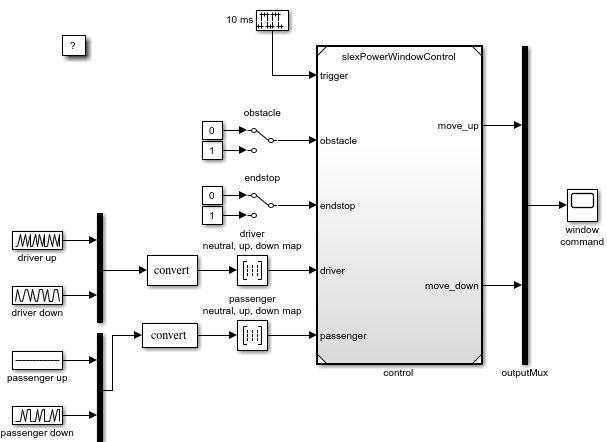
Начальная модель Simulink для управления окном мощности, slexPowerWindowControl, является контроллером дискретных событий, который работает с заданной частотой дискретизации.
В этой реализации откройте подсистему управления окном мощности и убедитесь, что диаграмма Stateflow с управлением дискретными событиями формирует CSPEC, представленный наклонной толстой полосой в правом нижнем углу. Подсистема detect_obstacle_endstop инкапсулирует механизмы обнаружения пороговых значений.
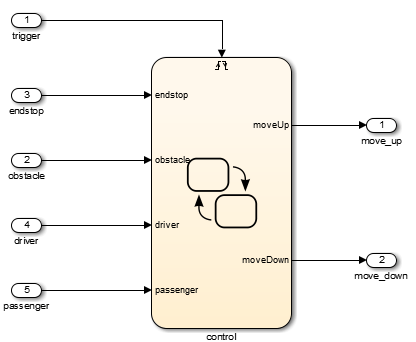
Управление дискретными событиями представляет собой модель Stateflow, которая расширяет понятие диаграммы перехода состояний иерархией и параллелизмом. Изменения состояния из-за команд пассажира инкапсулируются в суперсостояние, которое не соответствует команде активного драйвера.
Рассмотрим управление пассажирским окном. Пассажир или водитель может перемещать это окно вверх и вниз.
Этот конечный автомат содержит основные состояния системы окна питания: up, auto-up, down, auto-down, rest и emergency.
Управляющий вход. slexPowerWindowCntlInteract модель включает этот управляющий вход в качестве переключателей. Дважды щелкните эти переключатели, чтобы управлять ими вручную.
Протестируйте конечный автомат, который управляет окном питания, запустив входные тестовые векторы и проверив, что он достигает требуемого внутреннего состояния и генерирует выходной сигнал. Окно питания имеет следующие внешние входы:
Ввод пассажиров
Вход драйвера
Окно вверх или вниз
Препятствие в окне
Каждый вход состоит из вектора с этими входами.
Пассажирский ввод
| Элемент | Описание |
|---|---|
neutral | Переключатель управления пассажиром не нажат. |
up | Переключатель управления пассажиром формирует сигнал «вверх». |
down | Переключатель управления пассажиром формирует сигнал «вниз». |
Вход драйвера
| Элемент | Описание |
|---|---|
neutral | Переключатель управления драйвером не нажат. |
up | Переключатель управления драйвером генерирует сигнал «вверх». |
down | Переключатель управления драйвером генерирует сигнал «вниз». |
Окно вверх или вниз
| Элемент | Описание |
|---|---|
0 | Окно свободно перемещается между верхней или нижней частью окна. |
1 | Окно застряло вверху или внизу из-за физических ограничений. |
Препятствие в окне
| Элемент | Описание |
|---|---|
0 | Окно свободно перемещается между верхней или нижней частью окна. |
1 | Окно имеет препятствие в кадре. |
Формирование входных сигналов пассажира и водителя путем отображения сигналов вверх и вниз в соответствии со следующей таблицей:
| Исходные данные | Продукция | |||
|---|---|---|---|---|
| вверх | вниз | вверх | вниз | нейтральный |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Входные данные явно генерируют neutral событие из up и down события, генерируемые нажатием переключателя управления окном мощности. Входные данные вводятся в виде таблицы истинности в нейтральную, восходящую, нисходящую карту и нейтральную, восходящую, нисходящую карту водителя.
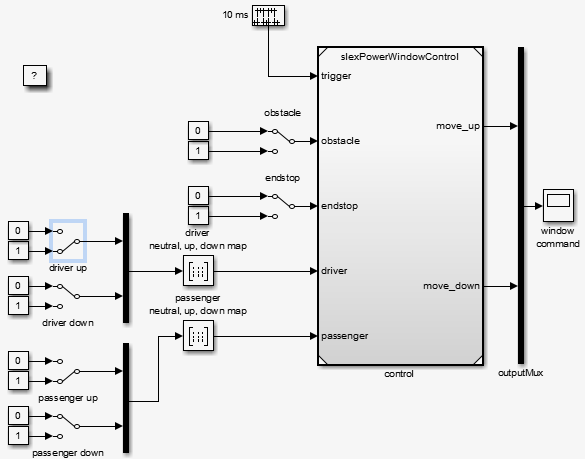
Случай 1: Окно вверх. Для наблюдения за поведением конечного автомата:
Откройте окно slexPowerWindowCntlInteract модель.
Запустите моделирование, а затем дважды щелкните переключатель пассажира вверх.
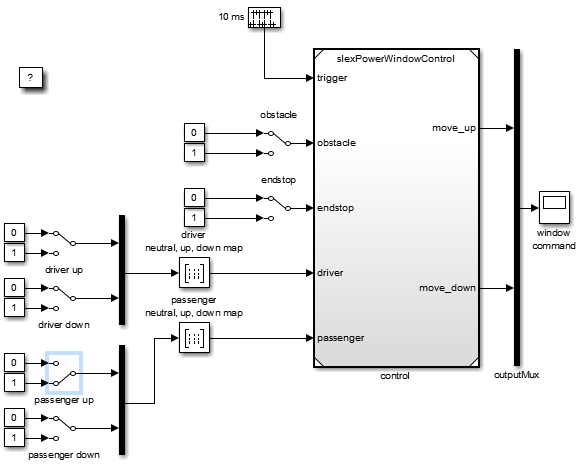
При нажатии физического переключателя окна в течение более одной секунды окно перемещается вверх до тех пор, пока переключатель вверх не будет отпущен (или не будет достигнута верхняя часть оконной рамы и endstop генерируется событие).
Дважды щелкните по выбранному пассажиру, чтобы отпустить его.
Моделирование модели.
Установка коммутатора endstop генерирует событие endstop.
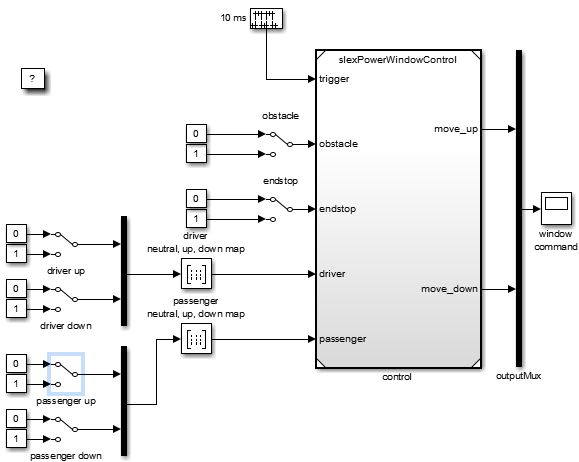
Случай 2: Окно Auto-Up. Если в течение короткого промежутка времени (менее секунды) нажать переключатель вверх физического окна пассажира, программное обеспечение активирует режим автоматического включения, и окно продолжает перемещаться вверх.
В течение короткого периода времени (менее секунды) нажимайте переключатель вверх физического окна пассажира.
В конечном счете окно достигает верхней части кадра, и программное обеспечение генерирует endstop событие. Это событие возвращает конечный автомат в нейтральное состояние.
Моделирование модели.
Случай 3: Приоритет на стороне драйвера. Переключатель водителя для окна пассажира имеет приоритет над командами водителя. Для наблюдения за поведением конечного автомата в этом случае:
Запустите моделирование, а затем переместите систему в passenger up путем двойного щелчка на переключателе вверх окна пассажира.
Дважды щелкните переключатель драйвера вниз.
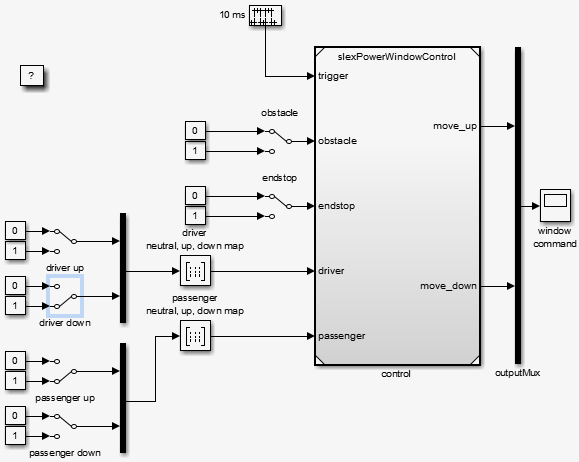
Моделирование модели.
Обратите внимание на то, как конечный автомат перемещается в управляющую часть драйвера для создания вывода окна вниз вместо вывода окна вверх.
Дважды щелкните элемент управления драйвером, чтобы запустить драйвер. Дважды щелкните переключатель драйвера вниз.
Достигается состояние «окно вверх» драйвера, которое снова генерирует выходной сигнал «окно вверх», т.е. windowUp = 1.
Чтобы наблюдать за состоянием объекта между окном и рамой, дважды щелкните переключатель препятствий.
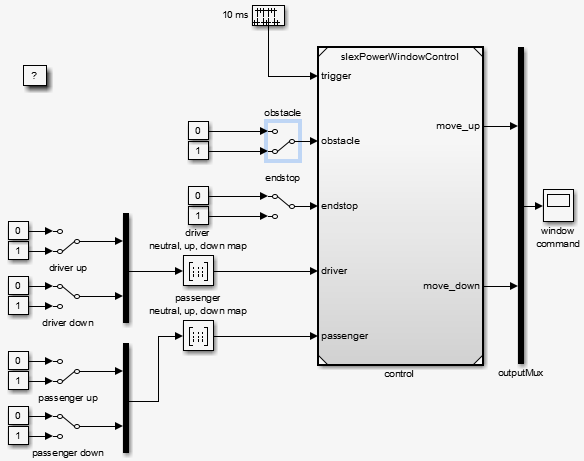
Моделирование модели.
При следующем примере времени конечный автомат перемещается к своему emergencyDown состояние для опускания окна на несколько дюймов. Насколько программное обеспечение опускает окно, зависит от того, как долго конечный автомат находится в emergencyDown состояние. Это поведение является частью следующей фазы анализа.
Если переключатель окна водителя или пассажира все еще активен, конечный автомат переходит в состояние «вверх» или «вниз» в следующее время выборки после выхода из аварийного состояния. Если переключатель препятствий также остается активным, программное обеспечение снова активирует аварийное состояние в следующее время выборки.
Проверка подсистемы управления. Проверьте управление дискретными событиями окна с помощью инструмента покрытия модели. Этот инструмент помогает определить степень, в которой в тестовом примере модели выполняются условные ветви контроллера. Это помогает оценить, приняты ли все переходы в управлении дискретными событиями, учитывая тестовый случай, и все ли предложения в условии, которое допускает конкретный переход, стали истинными. Несколько предложений могут разрешить один переход, например, переход от аварийной ситуации обратно к нейтральной происходит, когда произошло либо 100 засечек, либо если достигнут конечный стоп.
Для достижения полного покрытия каждое предложение получает значение true и false для используемых тестовых случаев. Процент переходов, которые выполняет тестовый случай, называется его модельным охватом. Охват модели - это показатель того, насколько тщательно тест выполняет модель.
С помощью программного обеспечения Simulink Coverage можно применить следующий тест к контроллеру окна питания.
| Положение | Шаг | ||||||
|---|---|---|---|---|---|---|---|
| 0 | 1 | 2 | 3 | 4 | 5 | 6 | |
| Пассажир вверх | 0 | 0 | 0 | 0 | 0 | 0 | 0 |
| Пассажир вниз | 0 | 0 | 0 | 1 | 0 | 1 | 1 |
| Драйвер вверх | 0 | 0 | 1 | 0 | 1 | 0 | 1 |
| Водитель вниз | 0 | 1 | 0 | 0 | 1 | 1 | 0 |
В этом тесте все коммутаторы неактивны в момент времени 0. На обычных шагах 1 с изменяется состояние одного или нескольких переключателей. Например, через 1 с активизируется переключатель вниз драйвера. Для автоматического запуска этих входных векторов замените ручные переключатели заданными последовательностями ввода. Для просмотра предварительно структурированной модели:
В окне команды MATLAB введите:
slexPowerWindowCntlCoverage
Смоделировать модель для создания отчета о покрытии Simulink Coverage.
Для slexPowerWindowCntlCoverage модель, отчет показывает, что этот тест обрабатывает 100% результатов решения от нейтрального, восходящего, нисходящего блока карты драйвера. Тем не менее, тест достигает только 50% покрытия для нейтрального, восходящего и нисходящего блока карты пассажира. Это покрытие означает общее покрытие для slexPowerWindowCntlCoverage составляет 45%, в то время как общий охват для slexPowerWindowControl модель составляет 42%. К числу факторов, влияющих на уровни охвата, относятся:
Блок пассажира вверх не меняется.
Блоки конечных стоков и препятствий не изменяются.
Увеличение покрытия модели. Чтобы увеличить общий охват до 100%, нужно учитывать все возможные комбинации настроек водителя, пассажира, препятствия и конечной остановки. Когда вы удовлетворены поведением управления, вы можете создать систему окна питания. Дополнительные сведения см. в разделе Создание модели с использованием конструкции на основе модели.
В этом примере увеличивается охват модели для проверки управления дискретными событиями окна. Для запуска в примере используются входные данные из slexPowerWindowCntlCoverage в качестве базовой линии для покрытия модели. Затем для дальнейшего управления дискретными событиями в окне создается больше наборов входных данных. Файл электронной таблицы, inputCntlCoverageIncrease.xlsxсодержит эти наборы ввода с использованием одного набора ввода на лист.
В примере, slexPowerWindowSpreadsheetGeneration утилита, которая создает шаблон электронной таблицы из модели контроллера, slexPowerWindowControl, создает inputCntlCoverageIncrease.xlsx. В inputCntlCoverageIncrease.xlsx, функция использует имена блоков в модели контроллера в качестве имен сигналов. slexPowerWindowSpreadsheetGeneration определяет имена листов. slexWindowSpreadsheetAddInput утилита заполняет inputCntlCoverageIncrease.xlsx с данными сигнала.
Имена листов этих наборов ввода и их описания:
| Наименование листа | Описание |
|---|---|
| Входы, зарегистрированные из |
| Входы, зарегистрированные из |
| Входы, зарегистрированные из |
| Входы, зарегистрированные из |
| Входы, зарегистрированные из |
| Водитель опускает окно, а пассажир не предпринимает никаких действий |
| Водитель выставляет окно, а пассажир не предпринимает никаких действий |
| Водитель опускает окно на одну секунду (auto-down) и пассажир не предпринимает никаких действий |
| Водитель выставляет окно на одну секунду (auto-up) и пассажир не предпринимает никаких действий |
| Пассажир опускает окно на одну секунду (auto-down) и водитель не предпринимает никаких действий |
| Пассажир выставляет окно на одну секунду (auto-up) и водитель не предпринимает никаких действий |
Для автоматического запуска этих входных векторов замените входные данные элемента управления дискретным событием на блок «Из электронной таблицы» с помощью файла. inputCntlCoverageIncrease.xlsx. Этот файл содержит несколько наборов входных данных. Для просмотра предварительно структурированной модели:
В окне команды MATLAB введите:
slexPowerWindowCntlCoverageIncrease
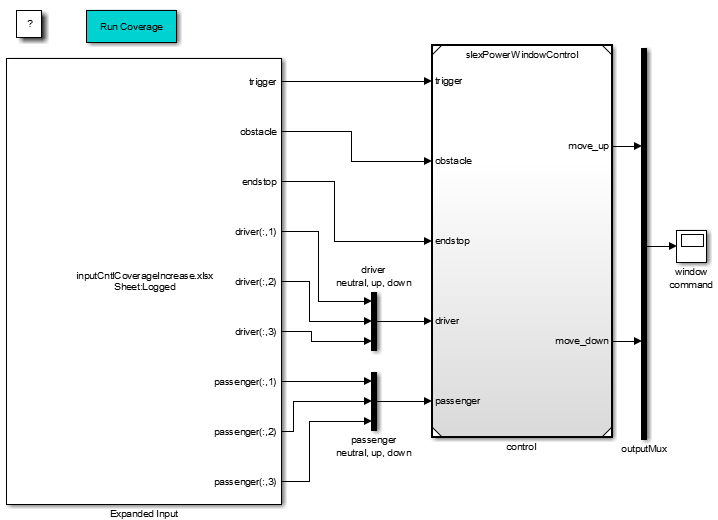
Чтобы создать отчет о покрытии Simulink Coverage для нескольких входных наборов, дважды щелкните подсистему Run Coverage в модели.
Для slexPowerWindowCntlCoverageIncrease модель, отчет показывает, что использование нескольких наборов ввода успешно повысило общий охват для slexPowerWindowControl модель от 42% до 78%. Уровень покрытия составляет менее 100% из-за отсутствия входных наборов для:
Состояние пассажира
Состояние драйвера вверх и вниз
Автоматическое выключение и автоматическое включение пассажиров
В конструировании на основе модели системная модель находится в центре процесса разработки - от разработки требований до реализации проекта и тестирования. Использование конструкции на основе модели для:
Использование общей среды проектирования для всех проектных групп.
Связать проекты непосредственно с требованиями.
Интеграция тестирования с проектированием для непрерывного выявления и исправления ошибок.
Уточнение алгоритмов с помощью многооменного моделирования.
Автоматическое создание встроенного программного кода.
Разработка и повторное использование наборов тестов.
Автоматическое создание документации для модели.
Повторное использование проектов для развертывания систем на нескольких процессорах и аппаратном обеспечении.
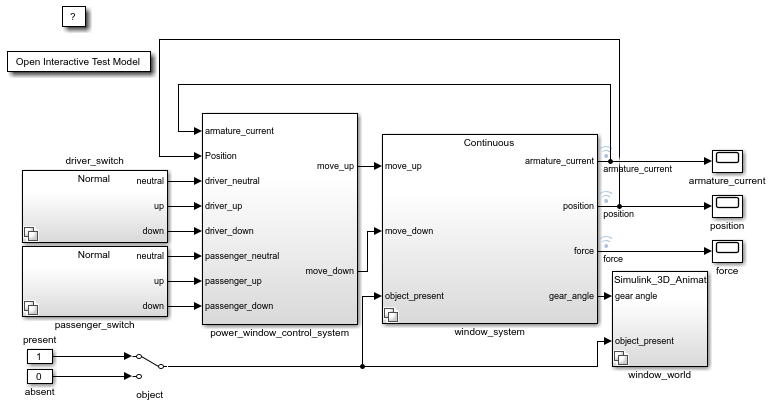
Требования, представленные в виде контекстной диаграммы, см. в разделе Контекстная диаграмма: Система окна питания.
Создайте модель Simulink, напоминающую схему контекста.
Поместите поведение установки в одну подсистему.
Создайте две подсистемы, содержащие водительский и пассажирский переключатели.
Добавьте механизм управления для удобного переключения между наличием и отсутствием объекта.
Поместите управление в одну подсистему.
Подключите новые подсистемы.
Для просмотра реализации этой модели в окне команд MATLAB введите:
slexPowerWindowStart
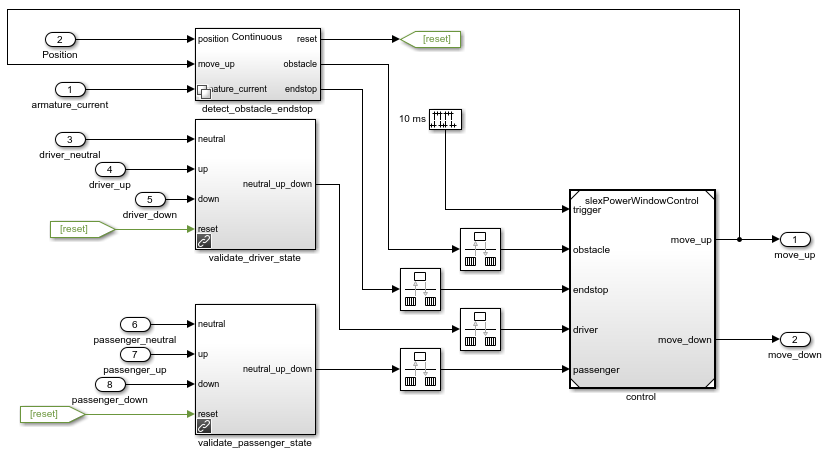
Можно использовать диаграмму операций управления окном мощности (Схема операций: Управление окном мощности) для разложения контроллера окна мощности контекстной диаграммы на части. На этой диаграмме показаны входные и выходные сигналы, представленные на схеме контекста, для упрощения трассировки их источников.
Чтобы удовлетворить всем требованиям, управление окном питания должно работать с проверкой правильности ввода данных водителем и пассажиром и обнаруживать оконечное устройство.
Требования, представленные в виде диаграммы активности, см. в разделе Диаграмма активности: Управление окном питания.
Дважды щелкните блок slexPowerWindowExample/power_window_control_system, чтобы открыть следующую подсистему:
Требования, представленные в виде диаграмм активности, см. в разделе Схема активности: Проверка драйвера и схема активности: Проверка пассажира.
Диаграмма действий добавляет функциональные возможности проверки данных для команд драйвера и пассажира для обеспечения правильной работы. Например, когда окно достигает верхней части, программное обеспечение блокирует up команда. Реализация разлагает каждый процесс проверки в новых подсистемах. Рассмотрим валидацию команд водителя (валидация команд пассажира аналогична). Проверьте, может ли модель выполнять up или down команды, в соответствии со следующим:
Модель позволяет down только в том случае, если окно открыто не полностью.
Модель позволяет up команда только в том случае, если окно закрыто не полностью и объект не обнаружен.
Третий процесс схемы операций проверяет, что программа посылает только одну из трех команд (neutral, up, down) к контроллеру. В фактической реализации оба up и down может быть одновременно истинным (например, из-за эффектов переключения).
Из подсистемы power_window_control_system это подсистема validate_driver_state:
Из подсистемы power_window_control_system это подсистема validate_passenger_state:
Требования, представленные в виде диаграммы действий, см. в разделе Диаграмма действий: Обнаружение конца препятствия.
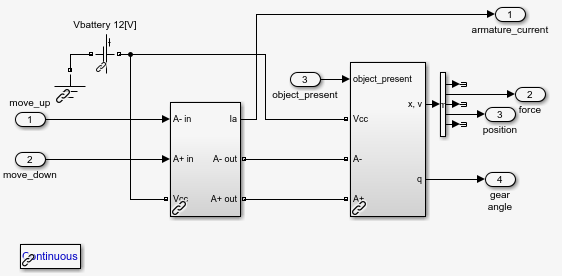
В slexPowerWindowExample power_window_control_system/detect_obstacle_endstop блок реализует эту схему действий в непрерывном варианте блока «Variant Subsystem». Во время итераций конструкции можно добавить дополнительные исполнения.

Дважды щелкните значок slexPowerWindowExample блок power_window_control_system/detect_obstacle_endstop/Continuous/verify_position модели:
Разработав и проверив систему управления дискретными событиями, интегрируйте ее с непрерывным поведением предприятия. Этот шаг является первой итерацией конструкции с простейшей версией растения.
В проекте перейдите в папку «Файлы» и нажмите «Проект». В папке configureModel выполните команду slexPowerWindowContinuous для открытия и инициализации модели.
Блок window_system использует блок Variant Subsystem для обеспечения различных уровней точности при моделировании завода. Дважды щелкните по блоку window_system/Continuous/2nd_order_window_system, чтобы увидеть непрерывный вариант.
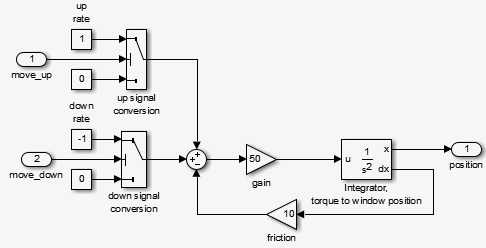
Растение моделируется как дифференциальное уравнение второго порядка с пошаговыми изменениями на его входе:
При создании диаграммы Stateflow windowUp, вход равен 1.
При создании диаграммы Stateflow windowDown, входной сигнал равен -1.
В противном случае входное значение равно 0.
Эта фаза позволяет анализировать взаимодействие между поведением состояния дискретного события, частотой его выборки и непрерывным поведением движения окна. Существуют пороговые значения для формирования верхней и нижней частей оконной рамы:
endStop
Событие, когда препятствие присутствует, то есть obstacle
Другие события
Дважды щелкните значок slexPowerWindowExample модель power_window_control_system/detect_obstacle_endstop/Continuous/verify_position блок, чтобы увидеть непрерывный вариант.
При запуске slexPowerWindowContinuous configureModel utility, в модели используется постоянный решатель времени ode23 (Bogacki-Shampine).
Структурный анализ системы приводит к:
Функциональное разложение системы
Определения данных со спецификой системных сигналов
Ограничения по времени
Структурный анализ может также включать архитектуру внедрения (за рамками данного обсуждения).
Реализация также добавляет механизм управления для удобного переключения между наличием и отсутствием объекта.
Ожидаемый ответ контроллера. Для просмотра перемещения окна в окне «Ярлыки проекта» дважды щелкните SimHybridPlantLowOrder. Кроме того, можно запустить задачу. slexPowerWindowContinuousSim.
Область положения показывает ожидаемый результат от контроллера. Через 30 см модель генерирует obstacle событие и диаграмма Stateflow переходит в emergencyDown состояние. В этом состоянии, windowDown выводится до тех пор, пока окно не опустится примерно на 10 см. Поскольку переключатель пассажирского окна вверх все еще включен, окно снова начинает движение вверх, и этот процесс повторяется. Остановите моделирование и откройте область расположения для наблюдения за колебательным процессом. В случае аварийной ситуации управление дискретными событиями опускается вниз по окну приблизительно на 10 см.
После первоначального анализа управления дискретными событиями и непрерывной динамики можно использовать подробную модель завода для оценки производительности в более реалистичной ситуации. Лучше всего проектировать модели на таком уровне детализации в области мощности, иными словами, как потоки энергии. В этом могут помочь несколько доменных блоков MathWorks.
Чтобы учесть энергетические потоки, добавьте более подробный вариант, состоящий из силовой электроники и многофюзеляжной системы, в подсистему вариантов window_system.
Чтобы открыть модель и изучить более подробный вариант завода, в проекте выполните команду configureModel slexPowerWindowPowerEffects.
Дважды щелкните значок slexPowerWindowExampleмодель window_system/Power Эффекты - блок Visualization/detailed_window_system.
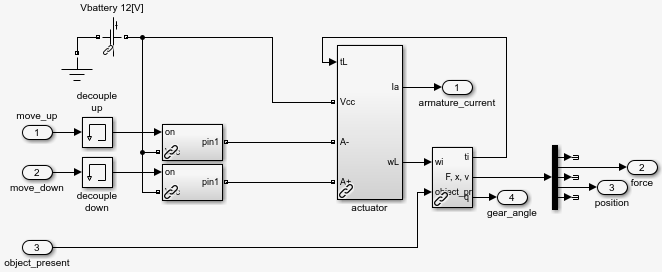
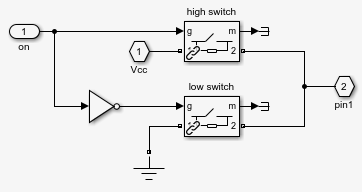
Подсистема силовой электроники. Модель должна усиливать управляющие сигналы, генерируемые контроллером дискретных событий, чтобы быть достаточно мощной для привода двигателя постоянного тока, который перемещает окно.
Модули усиления моделируют это поведение. Они показывают, что переключатель либо подключает двигатель постоянного тока к напряжению батареи, либо заземляет. Подключив батарею в обратном направлении, система генерирует отрицательное напряжение, и окно может двигаться вверх, вниз или оставаться неподвижным. Окно всегда управляется с максимальной мощностью. Другими словами, ни один контроллер двигателя постоянного тока не применяет заданную скорость.
Для просмотра внедрения дважды щелкните значок slexPowerWindowExampleмодель window_system/Power Эффекты - блок Visualization/detailed_window_system/amplification_up.
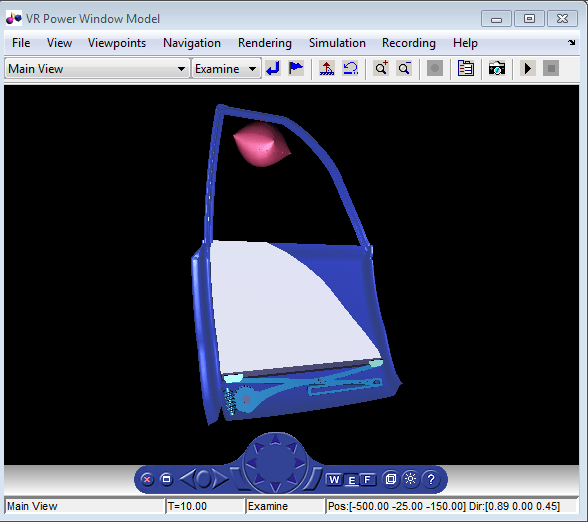
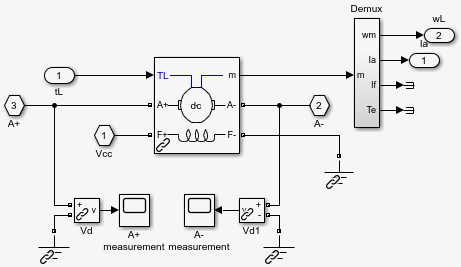
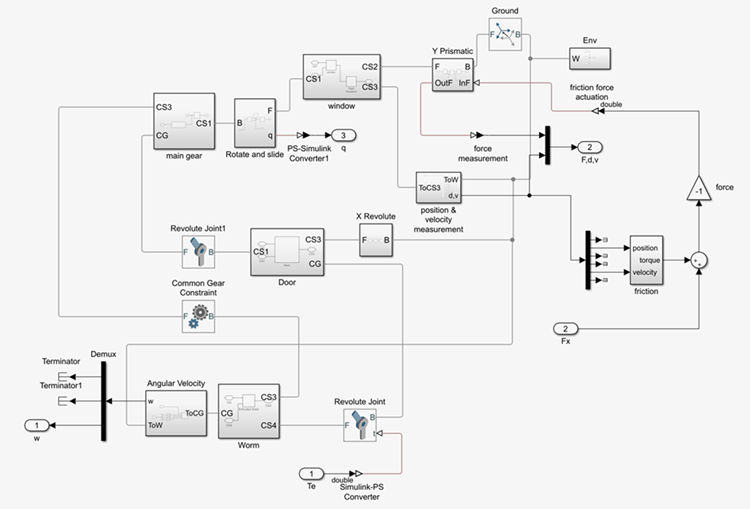
Многожильная система. Эта реализация моделирует окно с использованием блоков Simscape Multibody.
Чтобы увидеть реализацию привода, дважды щелкните значок slexPowerWindowExampleмодель window_system/Power Эффекты - блок Visualization/detailed_window_system/actuator.
Для просмотра реализации окна дважды щелкните значок slexPowerWindowExampleмодель window_system/Power Эффекты - блок Visualization/detailed_window_system/plant.

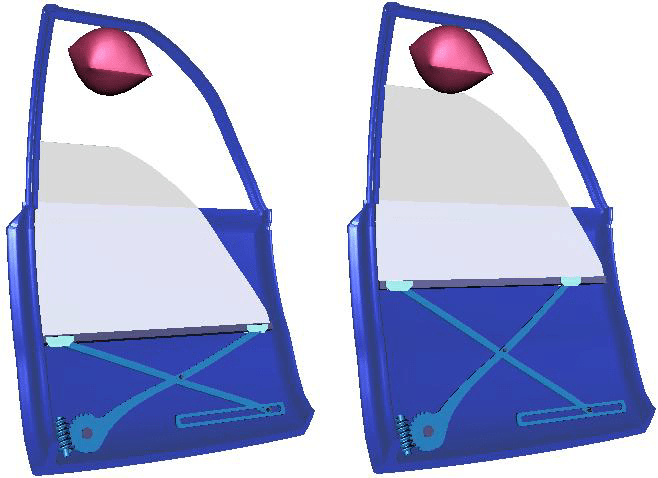
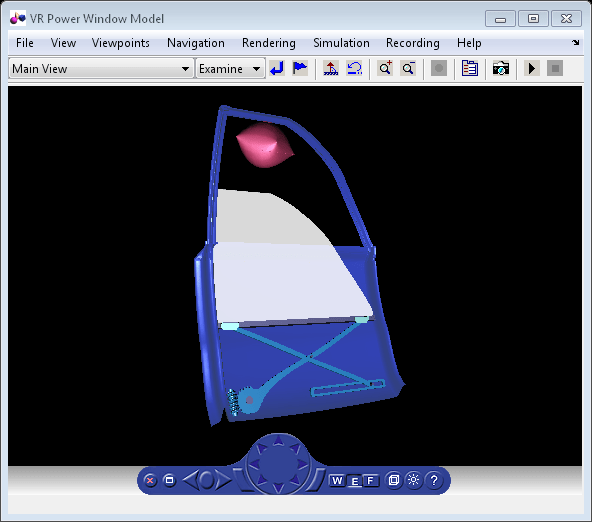
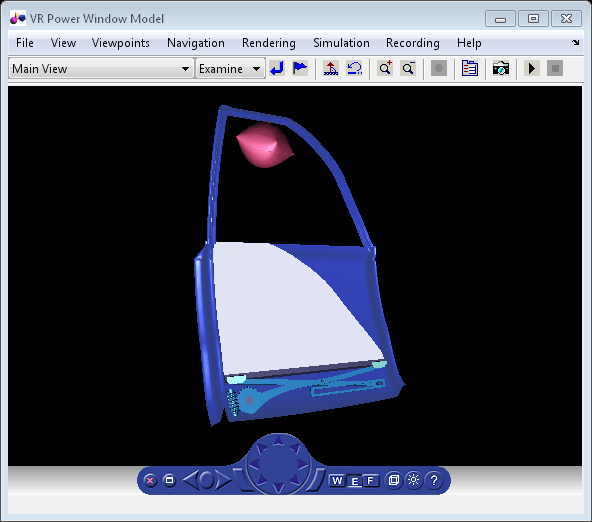
В этой реализации используются блоки Simscape Multibody для корпусов, соединений и исполнительных механизмов. Модель окна состоит из:
Червячная передача
Рычаг для перемещения держателя окна в вертикальном направлении
На рисунке показано перемещение механических деталей.
Выполнить итерацию в конструкторе. Важным результатом более детальной реализации является отсутствие измерения положения окна. Вместо этого модель измеряет постоянный ток двигателя и использует его для обнаружения конечных стоек и проверки наличия препятствия. На следующем этапе проектирования системы анализируется управление, чтобы убедиться, что оно не вызывает чрезмерную силу при наличии препятствия.
В исходной системе конструкция удаляет обнаружение препятствий и конечных остановов на основе положения окна и заменяет его реализацией на основе тока. Он также соединяет процесс с контроллером и измеряет положение и силу. Для отражения различных используемых сигналов необходимо изменить определение данных. Кроме того, обратите внимание, что из-за влияния мощности блоки теперь являются амперами.
PSPEC 1.3.1: DETECT ENDSTOP ENDSTOP = ARMATURE_CURRENT > ENDSTOP_MAX
PSPEC 1.3.2: DETECT OBSTACLE OBSTACLE = (ARMATURE_CURRENT > OBSTACLE_MAX) and MOVE_UP for 500 ms
PSPEC 1.3.3: ABSOLUTE VALUE ABSOLUTE_ARMATURE_CURRENT = abs(ARMATURE_CURRENT)
В этой таблице перечислены дополнительные сигналы для определений данных контекстной диаграммы: Система окна питания.
Контекстная диаграмма: изменения в определении системных данных окна питания
| Сигнал | Тип информации | Непрерывный/ Дискретный | Тип данных | Ценности |
|---|---|---|---|---|
ARMATURE_CURRENT | Данные | Непрерывный | Реальный | от -20 до 20 А |
В этой таблице перечислены измененные сигналы для определений данных «Схема активности: Обнаружение конца препятствия».
Схема действий: Обнаружение изменений в определении данных конца препятствия
| Сигнал | Тип информации | Непрерывный/ Постоянный | Тип данных | Ценности |
|---|---|---|---|---|
ABSOLUTE_ARMATURE_CURRENT | Данные | Непрерывный | Реальный | от 0 до 20 А |
ENDSTOP_MAX | Данные | Постоянный | Реальный | 15 A |
OBSTACLE_MAX | Данные | Постоянный | Реальный | 2,5 А |
Для просмотра оконной подсистемы дважды щелкните значок slexPowerWindowExampleмодель window_system/Power Эффекты - блок Visualization/detailed_window_system/plant/window.
Реализация использует таблицу подстановки и добавляет шум для оценки надежности управления. Чтобы увидеть реализацию подсистемы трения, дважды щелкните значок slexPowerWindowExampleмодель window_system/Power Эффекты - блок Visualization/detailed_window_system/plant/window/friction.
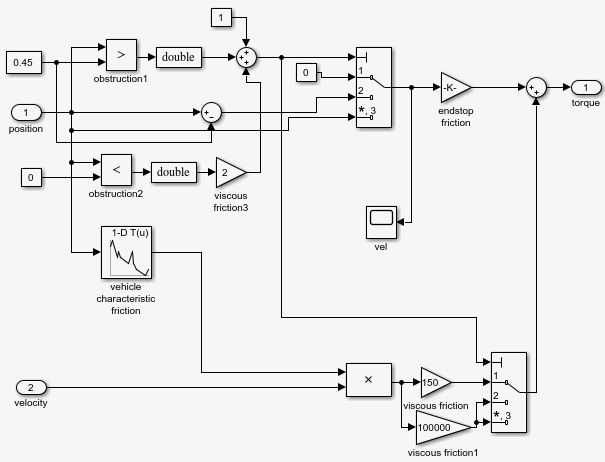
Идеализированная непрерывная установка обеспечивает доступ к позиции окна для endStop и obstacle формирование события. В более реалистичной реализации модель должна генерировать эти события из доступных физических переменных. Для систем с окнами питания эта физическая переменная обычно является током якоря, Ia, двигателя постоянного тока, который приводит в действие червячную передачу.
Когда окно движется, этот ток имеет приблизительное значение 2 А. При включении окна модель рисует переходный ток, который может достигать значения приблизительно 10 А. Когда ток превышает 15 А, модель активирует обнаружение конечных остановов. Модель проводит этот ток, когда угловая скорость двигателя поддерживается на уровне почти 0, несмотря на положительное или отрицательное входное напряжение.
Обнаружить присутствие объекта в этой настройке сложнее. Поскольку соображения безопасности ограничивают силу окна не более чем 100 Н, ток якоря гораздо менее 10 А должен обнаруживать объект. Однако это поведение вступает в противоречие с переходными значениями, достигнутыми при нормальной работе.
Реализация закона управления, который отключает обнаружение объектов во время достижения переходных значений. Теперь, когда система обнаруживает ток якоря более 2 А, она считает объект присутствующим и входит в emergencyDown состояние дискретного управления событиями. Откройте окно области действия силы (измерения находятся в ньютонах), чтобы проверить, что приложенная сила остается меньше 100 Н, когда объект присутствует и окно меняет свою скорость.
В действительности возможны и осуществляются гораздо более сложные законы о контроле. Например, вы можете реализовать нейронно-сетевые методы управления обучением для эмуляции фрикционной характеристики каждого отдельного транспортного средства и изменений во времени.
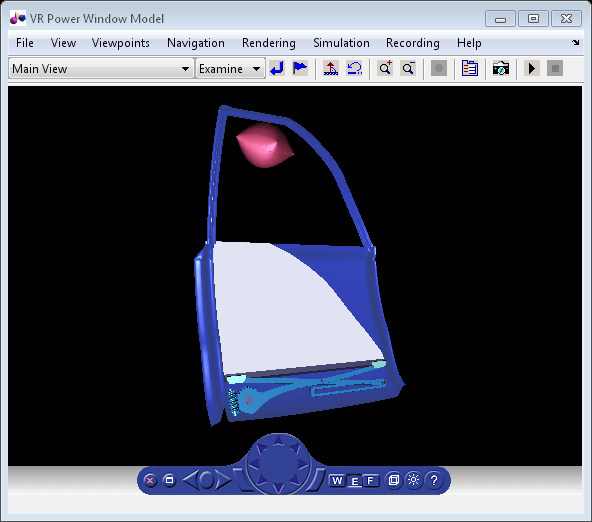
Если установлено программное обеспечение Simulink 3D Animation, можно просматривать геометрию системы в движении через мир виртуальной реальности. Если блок VR Sink еще не открыт, в slexPowerWindowExample/window_world/Simulink_3D_Animation View дважды щелкните на блоке VR Sink.
Для моделирования модели с помощью жесткого решателя:
В проекте выполните задачу, slexPowerWindowPowerEffectsSim. Это пакетное задание устанавливает решатель ode23tb (жесткая/TR-BDF2).
В slexPowerWindowExample модель passenger_switch/Normal блок, включите выключатель пассажира.
В slexPowerWindowExample модель driver_switch/Normal блок, выключите драйвер.
Моделирование модели.
Между 10 мс и 1 с во время моделирования, выключите пассажира блока slexPowerWindowExample/passenger_switch/Normal, переключаются на новичка авто поведение.
Наблюдайте, как держатель окна начинает перемещаться вертикально, чтобы закрыть окно. Когда модель сталкивается с объектом, она поворачивает окно вниз.
Дважды щелкните значок slexPowerWindowExample model passenger_switch/Normal block driver down switch, чтобы полностью свернуть окно и затем смоделировать модель. В этом блоке, менее чем за одну секунду моделирования, выключите переключатель отключения драйвера, чтобы инициировать режим автоматического отключения.
Когда окно достигнет нижней части рамки, остановите моделирование.
Посмотрите на измерение положения (в метрах) и на измерение тока якоря (Ia) (в амперах).
Примечание
Абсолютное значение переходного тока якоря при нормальном поведении не превышает 10 А. Модель обнаруживает препятствие, когда абсолютное значение тока якоря, необходимого для перемещения окна вверх, превышает 2,5 А (на самом деле оно меньше -2,5 А). Во время нормальной работы это примерно 2 А. Возможно, потребуется увеличить область, чтобы увидеть это измерение. Модель обнаруживает конечный упор окна, когда абсолютное значение тока якоря превышает 15 А.
Изменение тока якоря при нормальной работе обусловлено трением, включаемым в себя измерением скоростей и положений шарниров и применением коэффициентов, специфичных для окна.
Ток якоря, используемый в управлении окном питания, является идеальным значением, которое доступно из-за использования модели привода. В более реалистичной ситуации компоненты сбора данных должны измерять это текущее значение.
Чтобы включить компоненты сбора данных, добавьте более реалистичный вариант измерения в подсистему вариантов window_system. Этот реалистичный вариант измерения содержит блок формирования сигнала, в котором ток выводится на основе измерения напряжения.
Чтобы открыть модель и настроить реалистичное измерение, в проекте выполните задание configureModel slexPowerWindowRealisticArmature.
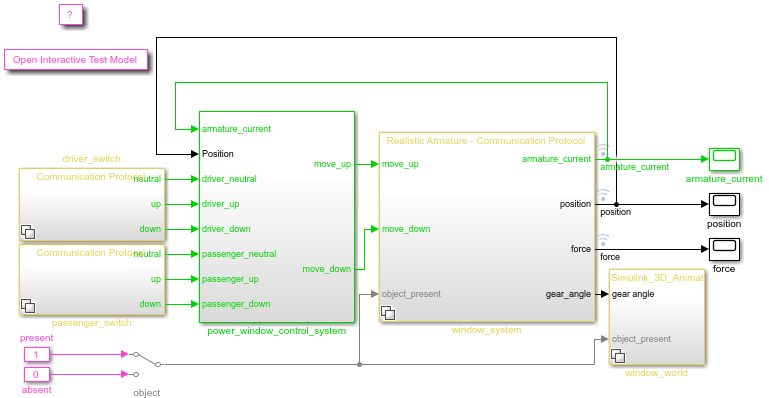
Чтобы просмотреть содержимое блока «Реалистичный каркас - коммуникационный протокол», дважды щелкните значок SlexPowerWindowExample модель window_system/Realistic Арматура - связь Protocol/detailed_window_system_with_DAQ.
Измерительное напряжение находится в диапазоне аналого-цифрового преобразователя (АЦП), который дискретизирует на основе заданного числа битов. Необходимо масштабировать результирующее значение на основе значения резистора и диапазона АЦП.
Включите эти операции как вычисления с фиксированной точкой. Для достижения необходимого разрешения с заданным диапазоном требуется 16 бит вместо 8.
Изучите тот же сценарий:
В блоке slexPowerWindowExample/passenger_switch/Normal установите переключатель пассажира.
Запустите моделирование.
Через некоторое время в блоке slexPowerWindowExample/passenger_switch/Normal выключите выключатель пассажира вверх.
После того, как окно будет развернуто вниз, нажмите кнопку «slexPowerWindowExample/passenger_switch/Normal block driver down».
Через некоторое время выключите выключатель драйвера блока slexPowerWindowExample/passenger_switch/Normal.
Когда окно достигнет нижней части рамки, остановите моделирование.
Увеличьте изображение окна области armature_current и обратите внимание на дискретизированный внешний вид.
Аналогично управлению выводом окна мощности, аппаратные средства должны генерировать входные события. В этом случае аппаратными средствами являются оконные переключатели на дверных и центральных панелях управления. Локальные процессоры генерируют эти события и затем передают их контроллеру окон по шине CAN.
Чтобы включить эти события, добавьте вариант, содержащий входные данные от шины CAN и компонентов коммутатора, которые генерируют события, доставляемые по шине CAN, к подсистемам переключения драйвера и переключения пассажира. Чтобы открыть модель и настроить коммуникационные протоколы CAN, запустите задачу configureModel, slexPowerWindowCommunicationProtocolSim.
Чтобы видеть внедрение подсистемы выключателя, дважды щелкните по slexPowerWindowExample/driver_switch/Communication блоку выключателя контроля за окном Протокола/водителя.
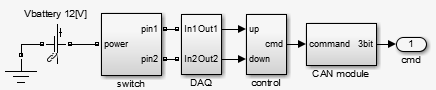
Обратите внимание на структуру, которая очень похожа на систему управления окнами. Эта структура содержит:
Модель установки, представляющая управляющий переключатель
Подсистема сбора данных, включающая, помимо прочего, компоненты обработки сигналов
Модуль управления для отображения команд от физического коммутатора в логические команды
Модуль CAN для отправки событий на шину данных транспортного средства
Можно добавить эффекты связи, например, другие системы, использующие шину CAN, и больше реализма, подобного описанным фазам. Каждая фаза позволяет анализировать контроллер дискретных событий во все более реалистичной ситуации. При наличии достаточно подробной информации можно автоматически генерировать код контроллера для любой конкретной целевой платформы.
Можно создать код для разработанной модели управления. slexPowerWindowExample.
Отображение частоты дискретизации контроллера. В редакторе Simulink на вкладке Debug выберите Information Overlays > Sample Time > Colors. Убедитесь, что контроллер работает с равномерной частотой дискретизации.
Щелкните правой кнопкой мыши блок power_window_control_system и выберите «Код C/C + +» > «Построить эту подсистему».
Мостерман, Питер Дж., Янош Штипановиц и Себастьян Энгелл, «Компьютерно-автоматизированное многопарадигмное моделирование в технологии систем управления», IEEE Transactions on Control Systems Technology, Vol. 12, Number 2, 2004, pp. 223-234.
