Пакетная линеаризация относится к извлечению нескольких линеаризаций из модели для различных комбинаций операций ввода-вывода, рабочих точек и значений параметров. Пакетная линеаризация позволяет анализировать характеристики временной области, частотной области и стабильности модели Simulink ® или ее частей в различных рабочих условиях и диапазонах параметров. Результаты линеаризации партий можно использовать для проектирования контроллеров, устойчивых к изменениям параметров, или для проектирования контроллеров, запланированных по коэффициенту усиления, для различных рабочих условий. Результаты пакетной линеаризации можно также использовать для реализации аппроксимаций линейных параметров (LPV) нелинейных систем с помощью системного блока LPV Toolbox™ системы управления.
Чтобы понять различные типы линеаризации партий, рассмотрим модель левитации магнитного шара, magball. Дополнительные сведения об этой модели см. в разделе Модель симулятора magball.
Можно выполнить пакетную линеаризацию этой модели путем изменения любой комбинации следующих параметров:
Наборы ввода-вывода - линеаризация модели с использованием различных операций ввода-вывода для получения любой функции передачи по замкнутому или разомкнутому контуру.
Для magball некоторые функции переноса, которые можно извлечь, указав различные наборы ввода-вывода, включают:
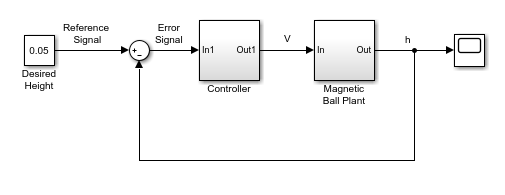
Модель установки магнитных шариков, модель контроллера
Функция передачи с замкнутым контуром из Reference Signal к выходу установки, h
Функция передачи с разомкнутым контуром для контроллера и магнитной шаровой установки; то есть передаточная функция из Error Signal кому h с разомкнутым контуром обратной связи
Модель отклонения выходного возмущения или функция передачи чувствительности, полученная на выходе Magnetic Ball Plant блок
Рабочие точки - в нелинейных моделях динамика модели изменяется в зависимости от условий эксплуатации. Нелинейную модель можно линеаризовать в различных рабочих точках для изучения изменения динамики модели или для проектирования контроллеров для различных рабочих условий.
В качестве примера динамики модели, изменяющейся в зависимости от рабочей точки, рассмотрим простой невынужденный висячий маятник с угловым положением и скоростью в качестве состояний. Эта модель имеет две точки равновесия, одна, когда маятник висит вниз, что стабильно, и другая, когда маятник указывает вверх, что нестабильно. Линеаризация, близкая к стабильной рабочей точке, создает стабильную модель, в то время как линеаризация, близкая к нестабильной рабочей точке, создает нестабильную модель.
Для magball модель, которая использует высоту шара в качестве состояния, можно получить несколько линеаризаций для изменения начальной высоты шара.
Параметры - параметры конфигурируют модель Simulink несколькими способами. Например, можно использовать параметры для задания коэффициентов модели или времени выборки контроллера. Можно также использовать дискретный параметр, например, управляющий вход в блок многопортового коммутатора, для управления трактом данных в модели. Поэтому изменение параметра может служить целому ряду целей в зависимости от того, как параметр вносит вклад в модель.
Для magball модель, можно изменять параметры блока PID Controller, Controller/PID Controller. Линеаризации, полученные путем изменения этих параметров, показывают, как контроллер влияет на динамику системы управления. Кроме того, можно изменять значения параметров установки магнитного шарика для определения надежности контроллера в зависимости от изменений в модели установки. Можно также изменять параметры блока ввода. Desired Heightи изучить влияние различных входных уровней на отклик модели.
Если параметры влияют на рабочую точку модели, можно выполнить пакетную обрезку модели с использованием образцов параметров, а затем выполнить пакетную линеаризацию модели в результирующих рабочих точках.
