С помощью PID-тюнера можно настроить блоки PID-контроллера с двумя степенями свободы (2DOF) и дискретного PID-контроллера (2DOF) для достижения как хорошего отслеживания уставок, так и хорошего отклонения возмущений.
Компенсатор PID с двумя степенями свободы, обычно известный как компенсатор ISA-PID, эквивалентен компенсатору обратной связи и компенсатору обратной связи, как показано на следующем рисунке.
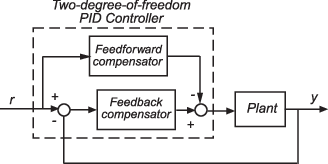
Компенсатором обратной связи является PD, а компенсатором обратной связи - PID. В блоках PID Controller (2DOF) и Discrete PID Controller (2DOF) вес уставки b и c определяют силу пропорционального и производного действия в компенсаторе прямой связи. Для получения дополнительной информации см. справочные страницы блоков PID Controller (2DOF) и Discrete PID Controller (2DOF).
Тюнер PID настраивает прирост PID P, I, D, и N. Для блоков PID Controller (2DOF) тюнер также автоматически настраивает веса уставок b и c. Можно использовать те же методы для уточнения и анализа конструкции, которая используется для настройки одностепенных ПИД-контроллеров.
Настроить диспетчера PID с 2 финансовыми департаментами блок в модели Simulink®:
Дважды щелкните блок. В диалоговом окне параметров блока нажмите «Настройка».
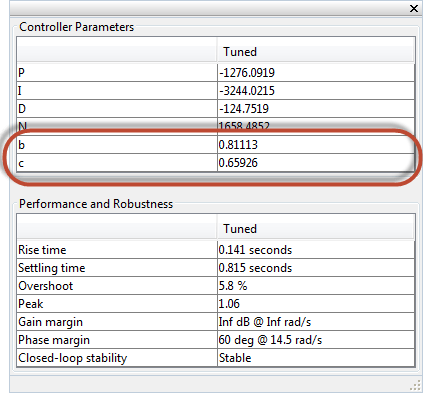
PID-тюнер открывает, линеаризует модель в начальных условиях модели и автоматически вычисляет начальную конструкцию контроллера, которая уравновешивает производительность и надежность. В этой конструкции PID-тюнер корректирует веса уставок b и c при необходимости, а также прирост PID. Чтобы просмотреть настроенные значения всех коэффициентов, щелкните![]() Показать параметры (Show Parameters).
Показать параметры (Show Parameters).
Проанализируйте и уточните начальную конструкцию, как описано в разделе Анализ конструкции в тюнере МТС. Весь одинаковый сюжеты ответа, регуляторы дизайна и варианты доступны для настройки диспетчеров PID с 2 финансовыми департаментами как в единственном случае степени свободы.
Проверьте конструкцию контроллера, как описано в разделе «Проверка конструкции МТС в модели Simulink».
При настройке блока PID Controller (2DOF) в PID Tuner в меню Type отображаются дополнительные опции для указания типа контроллера. Эти опции включают контроллеры с фиксированными значениями уставки, например, контроллеры, описанные в разделе Specify PI-D and I-PD Controllers.
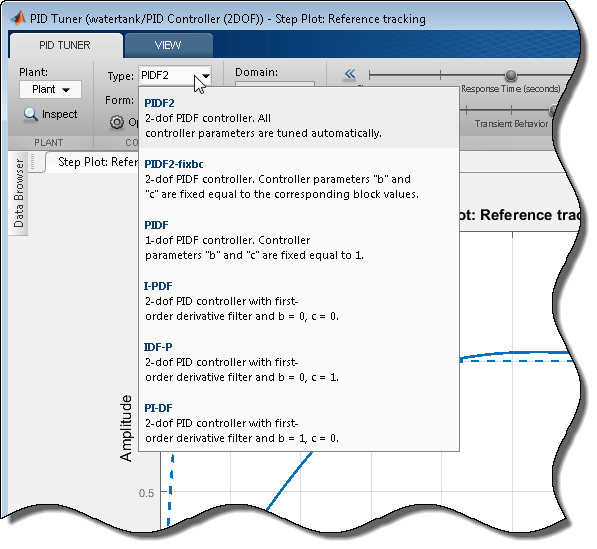
Доступность некоторых опций типа зависит от настроек контроллера в диалоговом окне блока PID Controller (2DOF).
| Напечатать | Описание | Настройка контроллера в блоке |
|---|---|---|
PIDF2 | 2-DOF ПИД-контроллер с фильтром по термину производной. Тюнер PID настраивает все параметры контроллера, включая веса уставок. | PID |
PIDF2-fixbc | 2-DOF ПИД-контроллер с фильтром по термину производной. PID-тюнер фиксирует вес уставок на значениях, указанных в блоке контроллера. | PID |
PIDF | Контроллер 2-DOF с действием, эквивалентным 1-DOF контроллеру PIDF, с фиксированным b = 1 и c = 1. | PID |
I-PDF | 2-DOF PID контроллер с фильтром на деривативе, с фиксированным b = 0 и c = 0. | PID |
IDF-P | 2-DOF PID контроллер с фильтром на деривативе, с фиксированным b = 0 и c = 1. | PID |
PI-DF | 2-DOF PID контроллер с фильтром на деривативе, с фиксированным b = 1 и c = 0. | PID |
PI2 | 2-DOF Контроллер PI. PID Тюнер настраивает все параметры контроллера, включая вес уставки на пропорциональном сроке, b. | PI |
PI2-fixbc | 2-DOF контроллер PI с фильтром на деривате. PID-тюнер фиксирует вес уставки b по значению, указанному в блоке контроллера. | PI |
PI | 2-DOF контроллер с действием, эквивалентным 1-DOF PI-контроллеру, с фиксированным b = 1. | PI |
PDF2 | 2-DOF контроллер ПД с фильтром на деривате (без интегратора). Тюнер PID настраивает все параметры контроллера, включая веса уставок. | PD |
PDF2-fixbc | 2-DOF контроллер ПД с фильтром по термину производной. PID-тюнер фиксирует вес уставок на значениях, указанных в блоке контроллера. | PD |
PD | Диспетчер с 2 финансовыми департаментами с действием, эквивалентным диспетчеру ФУНТА с 1 финансовым департаментом, с фиксированным b = 1 и c = 1. | PD |
