Для использования автозапуска PID настройте и разверните один из блоков автозапуска PID, Autotuner PID с замкнутым контуром или Autotuner PID с открытым контуром.
Блок автозапуска PID блокирует работу, выполняя эксперимент по оценке частотного отклика. Блоки вводят тестовые сигналы в установку и настраивают коэффициенты усиления PID на основе расчетной частотной характеристики.
Следующая принципиальная схема в целом иллюстрирует, как блок автотюнера PID вписывается в систему управления.
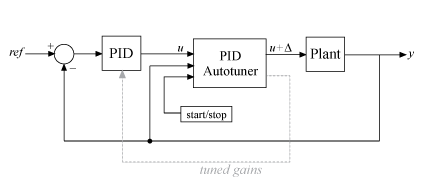
Пока не начнется процесс автоматического запуска, блок автоматического запуска передает управляющий сигнал непосредственно от u на вход установки при u + Δu. В этом состоянии модуль не влияет на производительность системы.
Когда начинается процесс автоматического запуска, блок вводит тестовый сигнал в u out сбор данных ввода-вывода установки и оценка частотной характеристики в реальном времени.
Если используется блок автоотюнера PID с разомкнутым контуром, блок открывает цикл обратной связи между u и u + Δu на время эксперимента оценки. Он вводит в u + Δu суперпозицию синусоидальных сигналов на частотах [1/3, 1, 3, 10] Для неинтегрирующих установок блок может также вводить сигнал шага для оценки усиления постоянного тока установки. Все тестовые сигналы вводятся поверх номинального входного сигнала установки, который является значением сигнала при u, когда начинается эксперимент.
Если используется блок автозапуска PID с замкнутым контуром, то установка остается под контролем контроллера PID с текущим усилением во время эксперимента. При настройке по замкнутому контуру используются синусоидальные контрольные сигналы на частотах [1/10,1/3, 1, 3, 10]
Когда эксперимент завершается, блок использует оцененную частотную характеристику для вычисления коэффициентов усиления PID. Алгоритм настройки стремится сбалансировать производительность и надежность при одновременном достижении заданной полосы пропускания и запаса по фазе. Можно сконфигурировать логику для передачи настроенного выигрыша от блока на ПИД-контроллер, что позволит проверить производительность по замкнутому циклу в реальном времени.
Ниже приведен общий обзор рабочего процесса автоматического запуска PID.
Включите в систему блок автотюнера PID, как показано на принципиальной схеме.
Сконфигурируйте сигнал запуска/останова, который управляет началом и завершением эксперимента настройки. Этот сигнал можно использовать для инициирования процесса автоматического запуска PID в любое время. При остановке эксперимента блок возвращает настроенные коэффициенты усиления PID.
Укажите параметры контроллера, например тип контроллера и целевую полосу пропускания для настройки.
Сконфигурируйте параметры эксперимента, такие как амплитуды возмущений, вводимых во время эксперимента с частотной характеристикой.
Запустите процесс автоматического запуска с использованием сигнала запуска/остановки и дайте ему возможность работать достаточно долго, чтобы завершить эксперимент по оценке частотного отклика.
Остановите процесс автоматического запуска. Когда эксперимент прекращается, autotuner вычисляет и возвращает настроенные коэффициенты усиления PID.
Перенесите настроенные коэффициенты усиления из блока на ПИД-контроллер. Затем можно проверить производительность настроенного контроллера в Simulink ® или в режиме реального времени.
Для получения подробной информации о выполнении каждого из этих шагов см.:
Автоматический запуск PID с замкнутым контуром | Автоматический запуск PID с разомкнутым контуром
