Для использования автотюнинга PID для завода, смоделированного в Simulink ®, необходимо включить в модель блок автотюнера PID. Можно управлять процессом автоматического запуска во время работы модели. После завершения настройки можно проверить настроенные параметры контроллера на соответствие моделируемому заводу. Использование автозапуска PID таким образом может быть полезно для создания начальной конструкции PID, которую позже можно уточнить с помощью автозапуска в реальном времени.
Следующие шаги предоставляют общий обзор рабочего процесса автоматического запуска PID в Simulink с использованием блоков Autotuner PID с замкнутым контуром или Autotuner PID с открытым контуром.
Включите в модель блок автотюнера PID между контроллером PID и установкой.
Сконфигурируйте сигнал запуска/останова, который управляет началом и завершением эксперимента настройки.
Укажите параметры контроллера, например тип контроллера и целевую полосу пропускания для настройки.
Сконфигурируйте параметры эксперимента, такие как амплитуды возмущений, вводимых во время эксперимента с частотной характеристикой.
Запустите модель и запустите настройку. Используйте сигнал запуска/остановки для инициирования процесса автоматического запуска PID. При запуске процесса блок автотюнера вводит тестовые сигналы и измеряет отклик установки.
Остановите эксперимент сигналом запуска/останова. Когда эксперимент прекращается, блок autotuner вычисляет и возвращает настроенные коэффициенты усиления PID. Вы можете изучить настроенные выгоды на предмет разумности.
Передача настроенного выигрыша от блока автотюнера на контроллер PID. Затем можно проверить производительность настроенного контроллера в Simulink.
На следующем рисунке показан один из способов включения блока автозапуска PID с замкнутым контуром между контроллером PID и заводом.
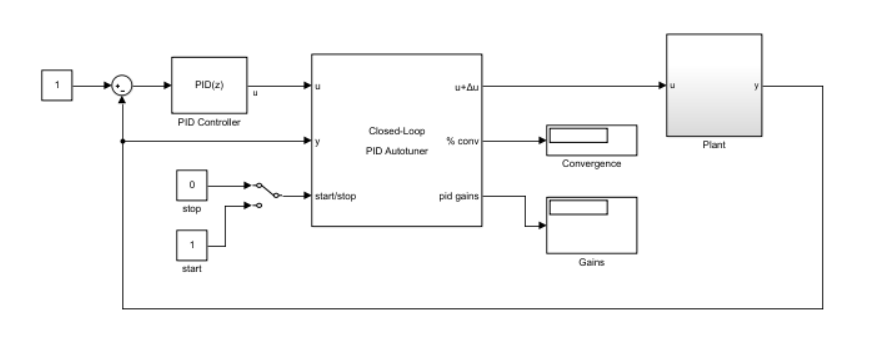
Управляющий сигнал u от контроллера PID подается в порт u блока автотюнера. Порт u + Δu подается на вход установки. Перед началом процесса автозапуска блок автозапуска подает сигнал управления PID непосредственно от u до u + Δu и на вход установки. В этом состоянии блок автотюнера не влияет на поведение установки или контроллера. В процессе автоматического запуска блок вводит тестовые сигналы на вход установки и измеряет отклик наy.
start/stop управление сигналом, когда начинается и заканчивается процесс автоматического запуска (см. Шаг 2. Настройка сигнала запуска/останова). По окончании эксперимента блок вычисляет коэффициенты усиления PID и возвращает их в pid gains порт.
Более подробный пример модели Simulink, настроенной для автозапуска PID с замкнутым контуром, см. в разделе Настройка контроллера PID в режиме реального времени с использованием блока автозапуска PID с замкнутым контуром.
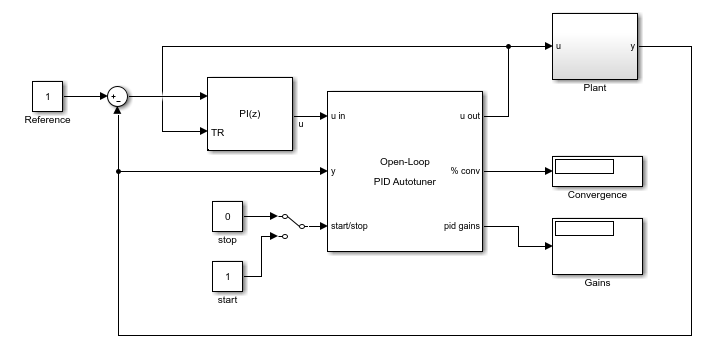
Блок автоотюнера PID с разомкнутым контуром открывает контур между u и u + Δu во время эксперимента оценки. Если ваш контроллер включает интегральное действие, вы можете использовать отслеживание сигналов, чтобы избежать срабатывания интегратора во время размыкания контура. Отслеживание сигналов позволяет ПИД-контроллеру продолжать отслеживать реальный входной сигнал установки, пока он находится вне контура. Без него система может испытать удар, когда контур управления замкнут в конце процесса настройки. В системе, показанной на следующем рисунке, контроллер PID представляет собой блок контроллера Simulink PID с включенным параметром Enable tracking mode. Вход установки поступает на вход отслеживания блока контроллера.
Более подробный пример модели Simulink, настроенной для автоматического запуска PID с разомкнутым контуром, см. в разделе Настройка контроллера PID в режиме реального времени с использованием блока автоматического запуска PID с разомкнутым контуром.
Чтобы запустить и остановить процесс автоматического запуска, используйте сигнал на start/stop порт. Когда эксперимент не выполняется, блок пропускает сигналы без изменений от u до u + Δu. В этом состоянии блок не влияет на поведение установки или контроллера.
Эксперимент по оценке частотного отклика начинается и заканчивается, когда блок принимает повышающийся или падающий сигнал на start/stop порт, соответственно. В системах, показанных на этапе 1. Включить Autotuner в модель, сигнал запуска/остановки является простым переключателем. Во время работы модели можно использовать переключатель для начала и завершения эксперимента. По завершении эксперимента алгоритм генерирует настроенные коэффициенты усиления PID, и блок возвращает их в pid gains порт.
В качестве альтернативы ручному переключению можно сконфигурировать start/stop сигнал для автоматического начала и завершения эксперимента в определенное время моделирования. Например, можно использовать сумму двух блоков Step: Настроить один блок Step на шаг от 0 до 1 в момент начала эксперимента, и второй блок Step на шаг от 1 до 0 в момент окончания. Подать сумму двух сигналов в start/stop порт блока автозапуска PID.
Вы можете настроить любую другую логику, подходящую для вашего приложения, чтобы контролировать время начала и окончания эксперимента. Дополнительные сведения о том, когда начинать и останавливать эксперимент, см. в разделе Шаг 5. Запустите модель и запустите эксперимент по настройке.
В блоке автотюнера PID укажите конфигурацию настраиваемого контроллера PID, используя следующие параметры блока:
Напечатать
Форма
Временная область
Время выборки контроллера (с)
Метод интегратора
Метод фильтрации
Затем укажите целевую пропускную способность и запас по фазе для настройки с параметрами Целевая пропускная способность (рад/сек) и Целевой запас по фазе (градусы) соответственно.
Целевая полоса пропускания, указанная в градусах/сек, является целевым значением для частоты пересечения 0-dB усиления настроенного отклика CP с разомкнутым контуром, где P - ответ установки, а C - ответ контроллера. Эта частота пересечения приблизительно задает полосу пропускания управления. Для желаемого времени нарастания, (в секундах), хорошее предположение для целевой полосы пропускания составляет 2/( в секундах) рад.
Целевой запас фазы отражает требуемую надежность настроенной системы. Обычно выбирают значение в диапазоне около 45 ° - 60 °. В целом, более высокий запас по фазе улучшает превышение, но может ограничить скорость отклика. Значение по умолчанию, 60 °, стремится сбалансировать производительность и надежность, давая около 5-10% превышения, в зависимости от характеристик вашего завода.
Для получения дополнительной информации об установке этих параметров см. справочные страницы блока автоотюнера PID с замкнутым контуром или автоотюнера PID с открытым контуром.
В эксперименте по оценке частотно-ответной характеристики вводят синусоидальные сигналы на частотах, окружающих целевую ширину полосы λ c:
[1/3, 1, 3, 10]
[1/10,1/3, 1, 3, 10] startc для блока автоматического запуска PID с замкнутым контуром
Используйте параметр Sine Amplitues блоков для задания амплитуд этих сигналов.
Если установка асимптотически стабильна, блок автоотюнера PID с разомкнутым контуром может оценить коэффициент усиления постоянного тока установки с помощью ступенчатого возмущения. Задайте амплитуду этого возмущения с помощью параметра Step Amplitude. Если ваша установка имеет один интегратор, очистите параметр Estimate DC vain with step signal.
Внимание
Не используйте автоматическую установку PID с замкнутым или разомкнутым контуром с нестабильной установкой.
Не используйте автоматическую установку PID с разомкнутым контуром с установкой, имеющей более одного интегратора. Можно использовать автоматическую установку PID с замкнутым контуром на установке с несколькими интеграторами.
Все амплитуды возмущений должны быть:
Достаточно большой, чтобы возмущение преодолело любую зону нечувствительности в приводе установки и генерировало отклик выше уровня шума.
Достаточно мало, чтобы поддерживать работу установки в пределах приблизительно линейной области вблизи номинальной рабочей точки, и чтобы избежать насыщения ввода или вывода установки.
Для получения дополнительной информации об установке параметров эксперимента см. справочные страницы блоков Autotuner PID с замкнутым контуром и Autotuner PID с открытым контуром.
После настройки всех параметров настройки запустите модель.
Если настроено руководство start/stop сигнал, начните эксперимент, когда ваш завод достигнет стационарного состояния.
Если вы настроили start/stop сигнал, чтобы начать и завершить процесс настройки в определенное время, позволяют моделированию работать достаточно долго, чтобы начать эксперимент.
Эксперимент по оценке частотной характеристики заканчивается, когда start/stop сигнал падает.
Если настроено руководство start/stop сигнал, завершите эксперимент, когда сигнал на % conv выход стабилизируется около 100%.
Если вы настроили start/stop сигнал, чтобы начать и завершить процесс настройки в определенное время, позволяют моделированию проходить до конца эксперимента.
В любом случае консервативная оценка для времени эксперимента составляет 200/λ c для настройки по замкнутому контуру или 100/λ c для настройки по разомкнутому контуру, где startc - целевая полоса пропускания.
Когда вы прекращаете эксперимент, блок вычисляет новые коэффициенты усиления PID на основе расчетной частотной характеристики системы и заданных целей настройки. Проверь их на благоразумие. Например, если у вас есть начальный ПИД-контроллер, вы можете ожидать, что настроенные коэффициенты усиления будут приблизительно такими же, как и коэффициенты усиления первоначальной конструкции. Существует несколько способов просмотра настроенных выигрышей:
Просмотр выходных данных pid gains порт блока autotuner. Одним из способов просмотра этих выходных данных является подключение выходных данных к блоку Simulink Display.
В блоке на вкладке «Блок» нажмите кнопку «Экспорт в MATLAB». Блок создает структуру в рабочем пространстве MATLAB ® ,OnlinePIDTuningResult. Для получения дополнительной информации о содержимом этой структуры см. справочные страницы блока Autotuner PID с замкнутым контуром или Autotuner PID с открытым контуром.
Блок автотюнера может записывать настроенные параметры контроллера непосредственно в блок контроллера PID, если ваш контроллер PID:
Блок контроллера PID Simulink.
Пользовательский контроллер PID, для которого выполняются следующие условия:
Пользовательский контроллер является маскированной подсистемой.
Коэффициенты усиления PID являются параметрами маски P, I, D, и N. (Нет необходимости использовать все четыре параметра. Например, при использовании пользовательского PI-контроллера требуются только параметры маски P и I.)
Чтобы настроить блок автотюнера на запись настроенных коэффициентов усиления в контроллер, назначьте контроллер соответствующим блоком PID в параметрах блока автотюнера PID. (Для получения дополнительной информации см. справочные страницы блока Autotuner PID с замкнутым контуром или Autotuner с открытым контуром.) Затем обновите контроллер, нажав Обновить блок PID. Можно обновить прирост PID во время выполнения моделирования. Это полезно для немедленной проверки настроенного усиления PID.
Примечание
В любое время во время моделирования можно изменить параметры настройки или эксперимента, запустить эксперимент еще раз и переместить новый настроенный коэффициент усиления в блок PID. Затем можно наблюдать за поведением завода, так как моделирование продолжается с новыми выигрышами.
Если пользовательский контроллер PID не удовлетворяет условиям прямого обновления, необходимо передать настроенный выигрыш контроллеру каким-либо другим способом, например вручную или с помощью собственной логики.
При изучении этих коэффициентов усиления и передаче их на собственный контроллер следует иметь в виду значение этих коэффициентов усиления в блоках автотюнера PID. За дискретное время блоки принимают следующую функцию передачи контроллера PID:
+ NFd (z)],
в параллельной форме или в идеальной форме,
+ NFd (z))].
Fi (z) и Fd (z) зависят от значений, заданных для формул метода интегратора и метода фильтра соответственно. Дополнительные сведения см. на страницах ссылок на блоки автозапуска PID с замкнутым контуром или автозапуска PID с открытым контуром.
Автоматический запуск PID с замкнутым контуром | Автоматический запуск PID с разомкнутым контуром
