Прогнозирующий контроллер водителя для отслеживания продольной скорости и поперечной траектории
Блок динамики транспортного средства/Сценарии транспортного средства/Водитель
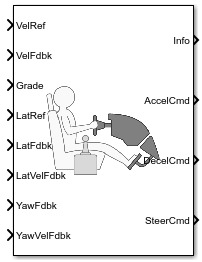
Блок прогнозирующего привода реализует контроллер, который генерирует нормализованные команды управления, ускорения и торможения для отслеживания продольной скорости и бокового опорного смещения. Нормализованные команды могут варьироваться от -1 до 1. Контроллер использует одноколейную (велосипедную) модель для оптимального одноточечного предварительного просмотра.
Параметры External Actions используются для создания входных портов для сигналов, которые можно использовать для моделирования стандартных тестовых маневров. Блок использует этот порядок приоритетов для команд ввода: disable (самый высокий), hold, override.
В этой таблице представлены параметры внешних действий.
| Цель | Параметр внешнего действия | Входные порты | Тип данных |
|---|---|---|---|
Переопределите команду accelerator с помощью команды input acceleration. | Переопределение ускорителя |
| Boolean |
| double | ||
Удерживайте текущее значение команды ускорения. | Удержание ускорителя | AccelHld | Boolean |
Отключите команду ускорения. | Отключение ускорителя | AccelZero | Boolean |
Переопределите команду замедлителя с помощью входной команды замедления. | Переопределение замедлителя |
| Boolean |
| double | ||
Удерживайте команду замедлителя при текущем значении. | Удержание замедлителя | DecelHld | Boolean |
Деактивизируйте команду замедлителя. | Отключение замедлителя | DecelZero | Boolean |
Переопределите команду рулевого управления с помощью входной команды рулевого управления. | Переопределение рулевого управления |
| Boolean |
| double | ||
Удерживайте текущее значение команды рулевого управления. | Удержание рулевого управления | SteerHld | Boolean |
Отключите команду рулевого управления. | Отключение рулевого управления | SteerZero | Boolean |
Используйте параметр Продольный тип элемента управления, cntrlType, чтобы указать одну из этих опций элемента управления.
Настройка | Блокирование реализации |
|---|---|
| Пропорционально-интегральное (PI) управление с подачей сигнала слежения и усилением подачи вперед. |
| Управление PI с отслеживанием усиления и усиления подачи вперед, которые являются функцией скорости транспортного средства. |
| Оптимальная модель управления с одноточечным предварительным просмотром (заглядыванием вперед), разработанная C. C. MacAdam1, 2, 3. Модель представляет поведение управления рулевым управлением водителя во время маневров следования по траектории и избегания препятствий. Предварительный просмотр драйверов (заглядывать вперед) для следования по предопределенному пути. Для реализации модели MacAdam, блок:
|
Для указания типа бокового элемента управления используется параметр Тип бокового элемента управления ControlTypeLat. В таблице указывается реализация блока.
Настройка | Блокирование реализации | ||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Оптимальная модель управления с одноточечным предварительным просмотром (заглядыванием вперед), разработанная C. C. MacAdam1, 2, 3. Модель представляет поведение управления рулевым управлением водителя во время маневров следования по траектории и избегания препятствий. Предварительный просмотр драйверов (заглядывать вперед) для следования по предопределенному пути. | ||||||||||||
| Контроллер, который использует способ Stanley4 для минимизации ошибки положения и ошибки угла текущей позы относительно эталонной позы. На панели Управление привязками (Reference Control) используйте:
|
Используйте параметр Shift Type, ShftType, чтобы задать одну из этих опций смены.
Настройка | Блокирование реализации |
|---|---|
| Нет передачи. Блок выдает постоянную передачу 1. Эта настройка используется для минимизации количества параметров, необходимых для формирования команд ускорения и торможения для отслеживания движения транспортного средства вперед. Эта настройка не допускает движения транспортного средства в обратном направлении. |
| Блок использует диаграмму Stateflow ® для моделирования планирования обратного, нейтрального и приводного переключения передач. Эта настройка используется для генерации команд ускорения и торможения для отслеживания движения транспортного средства вперед и назад с использованием простого планирования переключения передач в обратном, нейтральном и ведущем направлениях. В зависимости от состояния транспортного средства и обратной связи по скорости транспортного средства блок использует начальную передачу и время, необходимые для переключения транспортного средства вверх в движение или вниз в обратное или нейтральное положение. Для нейтральных передач блок использует команды торможения для управления скоростью транспортного средства. Для передач заднего хода блок использует команду ускорения для генерирования крутящего момента и команду торможения для снижения скорости транспортного средства. |
| Блок использует диаграмму Stateflow для моделирования планирования обратного, нейтрального, стояночного и N-ступенчатого переключения передач. Эта настройка используется для генерации команд ускорения и торможения для отслеживания движения транспортного средства вперед и назад с использованием планирования переключения передач в обратном, нейтральном, стояночном и N-ступенчатом режиме. В зависимости от состояния транспортного средства и обратной связи по скорости транспортного средства блок использует эти параметры для определения:
Для нейтральных передач блок использует команды торможения для управления скоростью транспортного средства. Для передач заднего хода блок использует команду ускорения для генерирования крутящего момента и команду торможения для снижения скорости транспортного средства. |
| Блок использует входную передачу, состояние транспортного средства и обратную связь скорости для формирования команд ускорения и торможения для отслеживания движения транспортного средства вперед и назад. Для нейтральных передач блок использует команды торможения для управления скоростью транспортного средства. Для передач заднего хода блок использует команду ускорения для генерирования крутящего момента и команду торможения для снижения скорости транспортного средства. |
Используйте параметры и Продольные единицы измерения скорости, velUnits и Angular Units, angUnits, чтобы задать единицы измерения для входного и выходного портов.
Используйте параметр выходного сигнала зубчатого колеса для создания GearCmd выходной порт. GearCmd сигнал содержит целое значение управляемой передачи транспортного средства.
Механизм | Целое число |
|---|---|
Парк |
|
Перемена |
|
Нейтральный |
|
Двигатель |
|
Механизм |
|
Используйте параметр «Выходной угол маховика» для задания единиц измерения для рулевых портов.
Настройка | Блокирование реализации | Порт | |
|---|---|---|---|
| Командный угол поворота, нормированный от -1 до 1. Блок использует предел насыщения угла колеса шины Предел угла колеса шины, параметр theta для нормализации команды. |
| |
Переопределяет команду рулевого управления с помощью входной команды рулевого управления, нормализованной от -1 до 1. |
| ||
| Командируемый угол поворота, в единицах, указанных в угловых единицах, angUnits. |
| |
Переопределяет команду рулевого управления с помощью входной команды рулевого управления в единицах измерения, заданных angUnits, angUnits. |
| ||
Если для типа элемента управления задано значение PI или Scheduled PIблок реализует пропорционально-интегральное (PI) управление с подачей сигнала слежения и усилениями прямой передачи. Для Scheduled PI блок использует коэффициенты усиления прямой подачи, которые являются функцией скорости транспортного средства.
Для вычисления выходного сигнала управления скоростью блок использует эти уравнения.
Настройка | Уравнение |
|---|---|
|
+ Kg
|
|
erefdt + Kg (v)
|
Фильтр нижних частот с погрешностью скорости использует эту передаточную функцию.
Для вычисления команд ускорения и торможения блок использует эти уравнения.
Уравнения используют эти переменные.
| vnom | Номинальная скорость транспортного средства |
| Kp | Пропорциональный коэффициент усиления |
| Ки | Интегральное усиление |
| Kaw | Усиление защиты от навивки |
| Kff | Коэффициент усиления при движении вперед по скорости |
| Kg | Коэффициент усиления при подаче под углом уклона |
| θ | Угол уклона |
| τerr | Ошибка при фильтрации константы времени |
| y | Номинальная выходная величина управления |
| ysat | Величина насыщенного выходного сигнала управления |
| eref | Ошибка скорости |
| eout | Разность между насыщенными и номинальными выходами управления |
| yacc | Сигнал ускорения |
| ydec | Сигнал торможения |
| v | Сигнал обратной связи по скорости |
| vref | Опорный сигнал скорости |
Если для параметра Тип продольного элемента управления (Longental control type), Тип cntrlType (cntrlType) или Тип бокового элемента управления (Lateral control type) задано значение Predictiveблок реализует оптимальную модель управления одноточечным предварительным просмотром (заглядыванием вперед), разработанную C. C. MacAdam1, 2, 3. Модель представляет поведение управления рулевым управлением водителя во время маневров следования по траектории и избегания препятствий. Предварительный просмотр драйверов (заглядывать вперед) для следования по предопределенному пути. Для реализации модели MacAdam, блок:
Представляет динамику в виде линейного однопутного (велосипедного) транспортного средства
Минимизирует предварительный просмотр сигнала ошибки в одной точке на T * секунд вперед по времени
Счета отставания водителя от перцепционных и нервно-мышечных механизмов
Для бокового движения и движения рыскания блок реализует эти линейные динамические уравнения.
(2aCαFI) δFψ˙=r
В матричной нотации:
u¯=u− m2Kptgsin (γ)
Модель с одной точкой предполагает минимальный предварительный просмотр сигнала ошибки в одной точке на T * секунд вперед по времени. a * - способность водителя прогнозировать будущую реакцию транспортного средства на основе текущего входного сигнала управления рулевым управлением. b * - способность водителя прогнозировать будущую реакцию транспортного средства на основе текущего состояния транспортного средства. Блок использует эти уравнения.
nn!] mT = [111000]
Уравнения используют эти переменные.
| a, b | Расположение шины вперед и назад, соответственно |
| m | Масса транспортного средства |
| Я | Инерция вращения транспортного средства |
| CɑF | Коэффициент поворота передней шины |
| CɑR | Коэффициент поворота задней шины |
| a *, b * | Скаляр прогнозирования драйвера и коэффициент усиления вектора соответственно |
| x | Прогнозируемый вектор состояния транспортного средства |
| v | Поперечная скорость |
| r | Скорость рыскания |
| Ψ | Угол курса переднего колеса |
| y | Боковое смещение |
| F | Системная матрица |
| δ, δF | Угол поворота и угол поворота передней оси соответственно |
| γ | Угол уклона |
| g | Вектор коэффициента управления |
| U | Прямая (продольная) скорость транспортного средства |
| Т * | Окно времени предварительного просмотра |
| (t + T *) | Предварительный просмотр входного сигнала тракта T * секунд вперед |
| u | Тяговая сила |
| mT | Вектор постоянного наблюдателя; обеспечивает боковое положение транспортного средства |
| площадь | Статическое сопротивление качению и трансмиссии |
| br | Линейное сопротивление качению и трансмиссии |
| cr | Аэродинамическое сопротивление качению и трансмиссии |
| Франк | Сопротивление качению |
Одноточечная модель, реализованная блоком, находит команду управления, которая минимизирует локальный индекс производительности J за текущий интервал предварительного просмотра (t, t + T).
] 2dstart
Чтобы минимизировать J относительно команды рулевого управления, это условие должно быть выполнено.
0
Вы можете выразить оптимальное решение управления с точки зрения текущей неоптимальной и соответствующей ненулевой выходной ошибки предварительного просмотра T * сек ahead1, 2, 3.
t + T *) a *
Блок использует расстояние предварительного просмотра и продольную скорость транспортного средства для определения временного окна предварительного просмотра.
ЛОГИЧЕСКАЯ ЕДИНИЦА
Уравнения используют эти переменные.
| Т * | Окно времени предварительного просмотра |
| (t + T *) | Предварительный просмотр входного сигнала тракта T * сек вперед |
| y (t + T *) | Предварительный просмотр выхода установки T * сек вперед |
| e (t + T *) | Предварительный просмотр сигнала ошибки T * сек вперед |
| u (t), uo (t) | Угол поворота и оптимальный угол поворота соответственно |
| L | Расстояние предварительного просмотра |
| J | Индекс производительности |
| U | Прямая (продольная) скорость транспортного средства |
Одноточечная модель, реализуемая блоком, вводит отставание драйвера. Задержка драйвера приводит к задержке, когда драйвер отслеживает задачи. В частности, это задержка переноса, вытекающая из воспринимающих и нервно-мышечных механизмов. Для вычисления задержки передачи драйвера блок реализует это уравнение.
− sü
Уравнения используют эти переменные.
| τ | Задержка транспортировки водителя |
| y (t + T *) | Предварительный просмотр выхода установки T * сек вперед |
| e (t + T *) | Предварительный просмотр сигнала ошибки T * сек вперед |
| u (t), uo (t) | Угол поворота и оптимальный угол поворота соответственно |
| J | Индекс производительности |
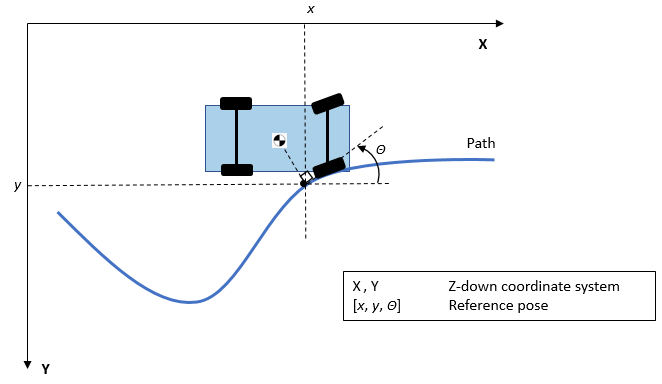
Если для параметра Тип бокового элемента управления задано значение controlTypeLat Stanleyблок реализует метод Стэнли 4. Для вычисления команды угла поворота контроллер Стэнли минимизирует ошибку положения и ошибку угла текущей позы относительно исходной позы. Направление движения транспортного средства определяет эти значения ошибок.
Для вычисления команды угла поворота контроллер минимизирует ошибку положения и ошибку угла текущего положения относительно опорного положения.
Погрешность положения представляет собой боковое расстояние от центра тяжести транспортного средства (CG) до контрольной точки на траектории.
Погрешность угла представляет собой угол транспортного средства по отношению к исходной траектории.
VelRef - Контрольная скорость транспортного средстваscalarСсылочная скорость, vref, в единицах, указанных в единицах продольной скорости, velUnits.
LongRef - Ориентир продольного перемещенияscalarОриентир смещения продольного центра масс (КМ), в инерциальной системе отсчёта, в м.
Чтобы включить этот порт:
Задайте для типа бокового элемента управления ControlTypeLat значение Stanley
Очистить векторный ввод для справки и обратной связи
LatRef - Ссылка на боковое смещениеscalarОтсчет смещения бокового центра масс (CM), в инерциальной системе отсчёта, в м.
Чтобы включить этот порт, выполните одно из следующих действий:
Задайте для типа бокового элемента управления ControlTypeLat значение Stanley и очистить векторный ввод для справки и обратной связи.
Задайте для типа бокового элемента управления ControlTypeLat значение Predictive.
EnblSteerOvr - Включить переопределение команд рулевого управленияscalarВключить переопределение команд управления.
Чтобы включить этот порт, выберите «Переопределение рулевого управления».
Типы данных: Boolean
SteerOvrCmd - Команда переопределения рулевого управленияscalarКоманда переопределения рулевого управления.
Используйте параметр «Выходной угол маховика» для задания единиц измерения для рулевых портов.
Настройка | Блокирование реализации | Порт | |
|---|---|---|---|
| Командный угол поворота, нормированный от -1 до 1. Блок использует предел насыщения угла колеса шины Предел угла колеса шины, параметр theta для нормализации команды. |
| |
Переопределяет команду рулевого управления с помощью входной команды рулевого управления, нормализованной от -1 до 1. |
| ||
| Командируемый угол поворота, в единицах, указанных в угловых единицах, angUnits. |
| |
Переопределяет команду рулевого управления с помощью входной команды рулевого управления в единицах измерения, заданных angUnits, angUnits. |
| ||
Чтобы включить этот порт, выберите «Переопределение рулевого управления».
Типы данных: double
SteerHld - Удержание рулевого управленияscalarЛогический сигнал, содержащий команду управления при текущем значении.
Для активизации этого порта выберите Roring hold.
Типы данных: Boolean
SteerZero - Отключить команду рулевого управленияscalarОтключить команду управления.
Чтобы включить этот порт, выберите «Управление отключено».
Типы данных: Boolean
EnblAccelOvr - Включить переопределение команды ускоренияscalarВключить переопределение команды ускорения.
Чтобы включить этот порт, выберите «» Переопределение ускорения «».
Типы данных: Boolean
AccelOvrCmd - Команда переопределения ускоренияscalarКоманда переопределения ускорения, нормализованная от 0 до 1.
Чтобы включить этот порт, выберите «» Переопределение ускорения «».
Типы данных: double
AccelHld - Удержание ускоренияscalarЛогический сигнал, содержащий команду ускорения при текущем значении.
Для включения этого порта выберите Acceleration hold.
Типы данных: Boolean
AccelZero - Отключить команду ускоренияscalarОтключить команду ускорения.
Для включения этого порта выберите Acceleration disable.
Типы данных: Boolean
EnblDecelOvr - Включить переопределение команды замедленияscalarВключить переопределение команды замедления.
Чтобы включить этот порт, выберите «Переопределение замедления».
Типы данных: Boolean
DecelOvrCmd - Команда отмены замедленияscalarКоманда переопределения замедления, нормализованная от 0 до 1.
Чтобы включить этот порт, выберите «Переопределение замедления».
Типы данных: double
DecelHld - Замедление удерживаетсяscalarЛогический сигнал, содержащий команду замедления при текущем значении.
Чтобы включить этот порт, выберите Удержание замедления.
Типы данных: Boolean
DecelZero - Отключить команду замедленияscalarДеактивизация команды замедления.
Чтобы включить этот порт, выберите Отключение замедления.
Типы данных: Boolean
ExtGear - Зубчатое колесоscalar
Механизм | Целое число |
|---|---|
Парк |
|
Перемена |
|
Нейтральный |
|
Двигатель |
|
Механизм |
|
Чтобы включить этот порт, установите тип Shift, shftType в значение External.
Grade - Угол уклона дорогиscalarУгол уклона дороги, γ, в град.
RefPose - Эталонная позаОпорная поза, заданная как вектор [x, y, Start]. x и y имеют значения в метрах, а Λ - в единицах, определяемых Angular units, angUnits.
x и y указывают опорную точку для направления транспортного средства в направлении. Λ задает угол ориентации траектории в этой опорной точке и является положительным в направлении против часовой стрелки.
Контрольная точка - это точка на пути, который находится ближе всего к CG транспортного средства. Можно использовать систему координат транспортного средства Z-up или Z-down, если для входных данных и параметров блока используется одна и та же система координат (Z-up или Z-down).
Чтобы включить этот порт, установите для параметра Тип бокового управления controlTypeLat значение Stanley и выберите параметр Vector input for reference and feedback pose.
Типы данных: single | double
VelFdbk - Продольная скорость транспортного средстваscalarПродольная скорость транспортного средства, U, в неподвижной раме транспортного средства, в единицах, указанных в единицах продольной скорости, velUnits.
CurrPose - Текущая позаТекущая поза транспортного средства, указанная как вектор [x, y, Start]. x и y имеют значения в метрах, а Λ - в единицах, определяемых Angular units, angUnits.
x и y определяют местоположение транспортного средства, которое определяется как CG транспортного средства. Можно использовать систему координат транспортного средства Z-up или Z-down, если для входных данных и параметров блока используется одна и та же система координат (Z-up или Z-down).
Чтобы включить этот порт, установите для параметра Тип бокового управления controlTypeLat значение Stanley и выберите параметр Vector input for reference and feedback pose.
Типы данных: single | double
LatFdbk - Боковое смещениеscalarБоковое смещение КМ, yo, в инерциальной системе отсчета, в м.
Чтобы включить этот порт, выполните одно из следующих действий:
Задайте для типа бокового элемента управления ControlTypeLat значение Stanley и очистить векторный ввод для справки и обратной связи.
Задайте для типа бокового элемента управления ControlTypeLat значение Predictive.
LatVelFdbk - Поперечная скорость транспортного средстваscalarПоперечная скорость транспортного средства, vo, в неподвижной раме транспортного средства, в м/с.
Чтобы включить этот порт, задайте тип бокового управления controlTypeLat равным Predictive.
YawFdbk - Угол рыскания транспортного средстваscalarУгол рыскания транспортного средства в инерциальной системе отсчета, в единицах, определяемых угловыми единицами, angUnits.
Чтобы включить этот порт, выполните одно из следующих действий:
Задайте для типа бокового элемента управления ControlTypeLat значение Stanley и очистить векторный ввод для справки и позы обратной связи.
Задайте для типа бокового элемента управления ControlTypeLat значение Predictive.
YawVelFdbk - Скорость рысканияscalarСкорость рыскания, ro, в неподвижной раме транспортного средства, в единицах, определяемых угловыми единицами, angUnits в секунду.
Чтобы включить этот порт, задайте тип бокового управления controlTypeLat равным Predictive.
[1] MacAdam, C. C. «Оптимальный контроль предварительного просмотра для линейных систем». Журнал динамических систем, измерений и управления. Том 102, номер 3, сентябрь 1980 года.
[2] MacAdam, C. C. «Применение оптимального предварительного контроля для моделирования вождения автомобилей с замкнутым контуром». Транзакции IEEE по системам, человеку и кибернетике. Том 11, выпуск 6, июнь 1981 года.
[3] MacAdam, C. C. Разработка моделей взаимодействия между водителем и транспортным средством для динамического анализа. Окончательный технический отчет UMTRI-88-53. Энн Арбор, Мичиган: Институт транспортных исследований Мичиганского университета, декабрь 1988 года.
[4] Гофман, Габриэль М., Клэр Дж. Томлин, Майкл Монтемерло и Себастьян Трюн. «Отслеживание автономных автомобильных траекторий для внедорожного вождения: дизайн контроллера, экспериментальная валидация и гонки». Американская конференция по контролю. 2007, стр 2296–2301. doi:10.1109/ACC.2007.4282788
