Vehicle Dynamics Blockset™ использует эти системы координат для вычисления динамики и положения объектов транспортного средства в среде визуализации 3D.
Окружающая среда | Описание | Системы координат |
|---|---|---|
Динамика транспортного средства в Simulink ® | Правое правило устанавливает последовательность X-Y-Z и поворот координатных осей, используемых для расчета динамики транспортного средства. Среда моделирования 3D Vehicle Dynamics Blockset использует следующие правые (RH) декартовы системы координат, определенные в стандартах SAE J670 [2] и ISO 8855 [3]:
Системы координат могут иметь любую ориентацию:
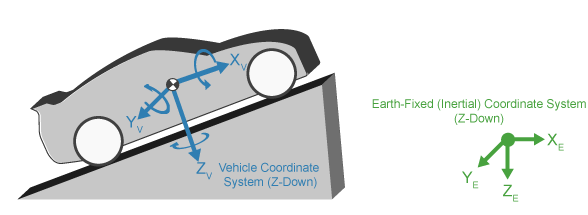
| Фиксированная (инерционная) система координат Земли |
3D механизм визуализации | Для позиционирования объектов и запроса 3D среды визуализации в блоке Vehicle Dynamics используется мировая система координат. |
Оси неподвижной системы координат (XE, YE, ZE) фиксируются в инерциальной системе координат. Инерциальный опорный кадр имеет нулевое линейное и угловое ускорение и нулевую угловую скорость. В ньютоновской физике Земля является инерциальным эталоном.
| Ось | Описание |
|---|---|
| КСЕНОН |
Ось XE находится в прямом направлении транспортного средства. Оси XE и YE параллельны нулевой плоскости. Нулевая плоскость является горизонтальной плоскостью, перпендикулярной гравитационному вектору. |
| ВЫ | |
| ЗЕ |
В ориентации Z-up положительная ось ZE указывает вверх. В ориентации Z-down положительная ось ZE указывает вниз. |
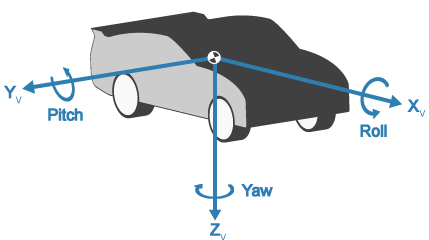
Оси системы координат транспортного средства (XV, YV, ZV) закреплены в опорной раме, прикрепленной к транспортному средству. Исходная точка находится у подрессоренной массы транспортного средства.
Ориентация по оси Z
| Ось | Описание |
|---|---|
| XV | Ось XV направлена вперед и параллельна плоскости симметрии транспортного средства. |
| YV |
Ось YV перпендикулярна плоскости симметрии транспортного средства. В ориентации Z-down:
|
| ZV |
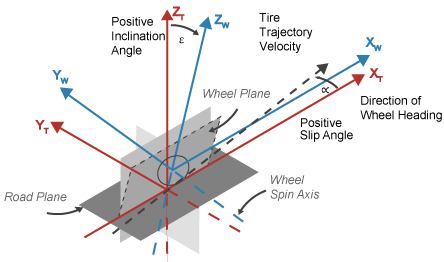
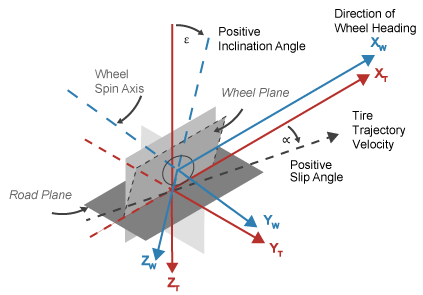
Оси системы координат шины (XT, YT, ZT) закреплены в опорной раме, прикрепленной к шине. Начало координат находится в контакте шины с землей.
Оси системы координат колеса (XW, YW, ZW) фиксируются в опорной рамке, прикрепленной к колесу. Начало координат находится в центре колеса.
Ориентация Z-Up [1 ]
Ориентация по оси Z
| Ось | Описание |
|---|---|
| XT | XT и YT параллельны дорожной плоскости. Пересечение плоскости колеса и плоскости дороги определяет ориентацию оси XT. |
| YT | |
| ZT |
Точки ZT:
|
| XW |
XW и YW параллельны плоскости колеса:
|
| YW | |
| ZW |
Точки ZW:
|
В среде визуализации 3D используется мировая система координат с осями, фиксированными в инерциальной системе координат.
![]()
| Ось | Описание |
|---|---|
| X | Направление движения транспортного средства вперед Крен - поворот правой стороны вокруг оси X |
| Y | Простирается справа от транспортного средства параллельно плоскости грунта Шаг - поворот вправо вокруг оси Y |
| Z | Выдвигается вверх Yaw - поворот левой стороны вокруг оси Z |
[1] Гиллеспи, Томас. Основы динамики транспортных средств. Уоррендейл, Пенсильвания: Общество автомобильных инженеров, 1992.
[2] Комитет по стандартам динамики транспортных средств. Терминология динамики транспортных средств. SAE J670. Уоррендейл, Пенсильвания: Общество автомобильных инженеров, 2008.
[3] Технический комитет. Дорожные транспортные средства - Динамика транспортных средств и способность удерживать дороги - Словарь. ISO 8855:2011. Женева, Швейцария: Международная организация по стандартизации, 2011 год.
[1] Переиздано с разрешения © 2008 SAE International. Дальнейшее распространение этого материала не допускается без предварительного разрешения SAE.
