Automated Driving Toolbox™ использует следующие системы координат:
Мир: Стационарная универсальная система координат, в которой размещены все транспортные средства и их датчики.
Транспортное средство: Прикреплено якорем к эго-транспортному средству. Обычно система координат транспортного средства размещается на земле прямо под средней точкой задней оси.
Для конкретного датчика, например, камеры или радара.
Пространственный: Зависит от изображения, снятого камерой. Местоположения в пространственных координатах выражены в единицах пикселей.
Узор: шахматная система координат, обычно используемая для калибровки датчиков камеры.
Эти системы координат применяются ко всем функциональным возможностям автоматической панели инструментов управления, от восприятия до управления и моделирования сценария управления. Сведения о конкретных различиях и сведения о реализации в среде моделирования 3D с использованием Unreal Engine ® от Epic Games ® см. в разделе Системы координат для моделирования Unreal Engine в автоматизированной панели инструментов вождения.
Все транспортные средства, датчики и связанные с ними системы координат размещаются в мировой системе координат. Мировая система координат важна для глобального планирования путей, локализации, картирования и моделирования сценариев движения. Automated Driving Toolbox использует правостороннюю декартову мировую систему координат, определенную в ISO 8855, где ось Z указывает вверх от земли. Единицы в метрах.
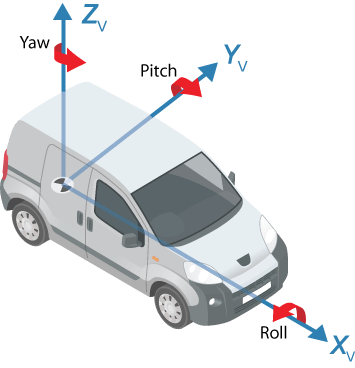
Система координат транспортного средства (XV, YV, ZV), используемая в автоматизированной панели инструментов вождения, прикреплена к эго-транспортному средству. Термин «эго-транспортное средство» относится к транспортному средству, которое содержит датчики, воспринимающие окружающую среду вокруг транспортного средства.
Ось XV направлена вперед от транспортного средства.
Ось YV указывает влево, если смотреть вперед.
Ось ZV указывает вверх от земли для поддержания правой системы координат.
Система координат транспортного средства соответствует стандарту ISO 8855 для вращения. Каждая ось положительна в направлении по часовой стрелке, если смотреть в положительном направлении этой оси.
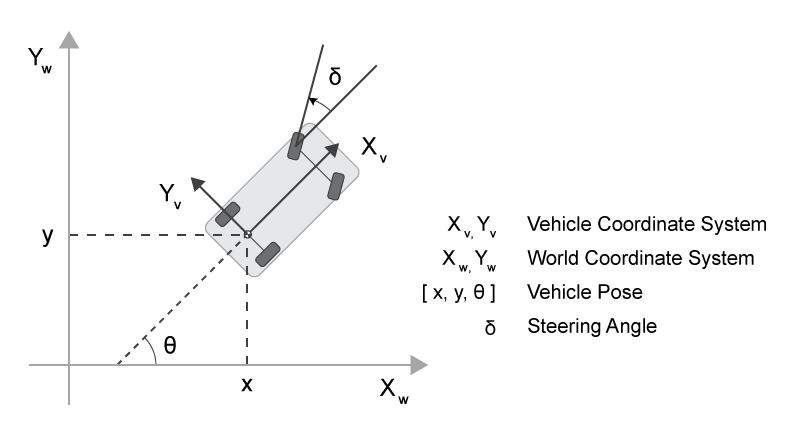
В большинстве функциональных возможностей автоматизированной панели инструментов вождения, таких как моделирование сценария движения в кубоиде и алгоритмы визуального восприятия, начало системы координат транспортного средства находится на земле ниже средней точки задней оси. При моделировании 3D сценария движения начало отсчета находится на земле, ниже продольного и бокового центра транспортного средства. Дополнительные сведения см. в разделе Системы координат для моделирования нереального двигателя в автоматизированной панели инструментов вождения.
Местоположения в системе координат транспортного средства выражаются в мировых единицах измерения, обычно в метрах.
Значения, возвращаемые отдельными датчиками, преобразуются в систему координат транспортного средства таким образом, чтобы их можно было поместить в унифицированную систему координат.
Для глобального планирования пути, локализации, отображения и моделирования сценария вождения состояние транспортного средства может быть описано с использованием позы транспортного средства. Угол поворота транспортного средства положителен в направлении против часовой стрелки.
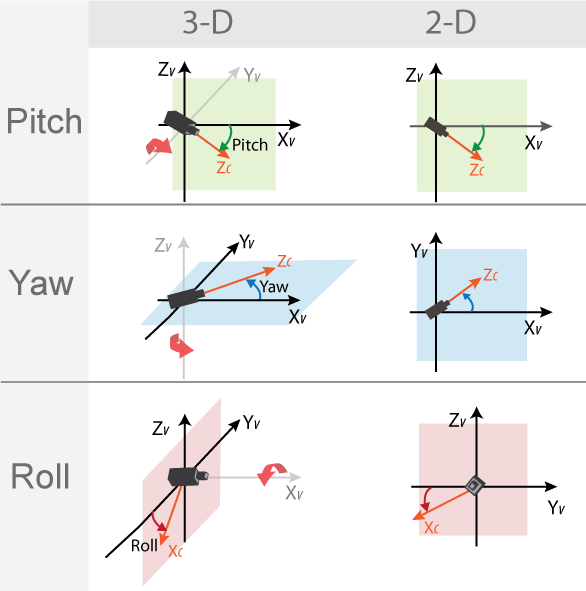
Автоматизированная система вождения может содержать датчики, расположенные в любом месте на транспортном средстве или в нем. Местоположение каждого датчика содержит начало координат его системы координат. Камера является одним из типов датчиков, часто используемых в автоматизированной системе вождения. Точки, представленные в системе координат камеры, описываются с началом координат, расположенным в оптическом центре камеры.
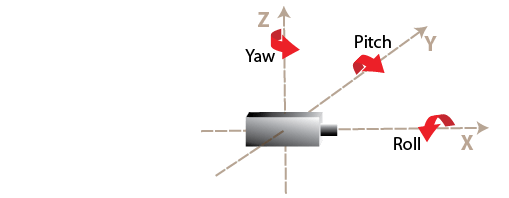
Углы рыскания, тангажа и крена датчиков соответствуют стандарту ISO. Эти углы имеют положительные направления по часовой стрелке при взгляде в положительном направлении осей Z-, Y- и X соответственно.
Пространственные координаты позволяют задать местоположение на изображении с большей детализацией, чем координаты пикселей. В системе координат пикселя пиксель обрабатывается как дискретная единица, однозначно идентифицируемая целочисленной парой строк и столбцов, например (3,4). В пространственной системе координат местоположения на изображении представлены в виде частичных пикселей, таких как (3.3,4.7).
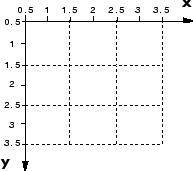
Дополнительные сведения о пространственной системе координат см. в разделе Пространственные координаты.
Для оценки параметров датчика монокулярной камеры обычной методикой является калибровка камеры с использованием множества изображений калибровочного шаблона, такого как шашечная доска. В системе координат массива (XP, YP) ось XP указывает вправо, а ось YP - вниз. Начало координат шашки - нижний правый угол верхнего левого квадрата шашки.
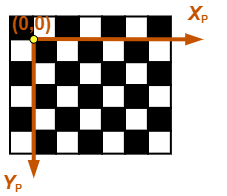
Каждый шашечный угол представляет другую точку в системе координат. Например, угол справа от начала координат равен (1,0), а угол ниже начала координат равен (0,1). Дополнительные сведения о калибровке камеры с помощью шахматного шаблона см. в разделе Калибровка монокулярной камеры.
