Оценка движения между изображениями или видеокадрами
Инструментарий для компьютерного зрения/Анализ и усовершенствование
Блок согласования блоков оценивает движение между двумя изображениями или двумя видеокадрами путем сравнения блоков пикселей. Блок соответствует блоку пикселей между кадрами путем перемещения блока пикселей по области поиска.
Главная вкладка
Estimate motion between - Оценка движения между изображениями или кадрамиCurrent frame and N-th frame back (по умолчанию) | Two imagesУкажите, следует ли оценивать движение между двумя изображениями или двумя видеокадрами. Выбрать Two images для оценки движения между двумя изображениями. Выбрать Current frame and N-th frame back для оценки движения между двумя видеокадрами, которые разнесены на N кадров.
Задайте для этого параметра значение Current frame and N-th frame back для отображения параметра N.
N - Количество кадров1 (по умолчанию) | скалярУкажите скалярное значение, представляющее количество кадров между опорным кадром и текущим кадром.
Чтобы включить этот параметр, задайте для параметра Оценка движения между параметрами значение Current frame and N-th frame back.
Search method - Метод поиска соответствия блоковExhaustive (по умолчанию) | Three-stepУкажите, как блок определяет местоположение блока пикселей в текущем кадре и следующем кадре, который лучше всего соответствует блоку пикселей.
Exhaustive - блок выбирает местоположение блока пикселей в следующем кадре путем перемещения блока по области поиска на один пиксель за раз. Этот процесс является дорогостоящим с точки зрения вычислений.
Three-step - Блок выполняет поиск блока пикселей в следующем кадре, который лучше всего соответствует блоку пикселей в текущем кадре, используя неуклонно уменьшающийся размер шага. Блок начинается с размера шага, приблизительно равного половине максимального диапазона поиска. На каждом этапе блок сравнивает центральную точку области поиска с восемью точками поиска, расположенными на границах области, и перемещает центральную точку в точку поиска, значения которой ближе всего к центральной точке. Затем блок уменьшает размер шага вдвое и снова начинает процесс. Этот вариант является менее дорогостоящим с точки зрения вычислений, хотя он может не найти оптимального решения.
Block matching criteria - Критерии соответствия блоковMean square error (MSE) (по умолчанию) | Mean absolute difference (MAD)Укажите, как блок измеряет сходство блока пикселей в текущем кадре с блоком пикселей в следующем кадре.
При выборе Mean square error (MSE)блок оценивает смещение центрального пикселя блока как ) значения, которые минимизируют это уравнение MSE:
d1, n2 + d2, k + 1)] 2
В предыдущем уравнении B представляет собой блок пикселей N1 × N2, а s (x, y, k) обозначает местоположение пикселя в (x, y) в кадре k.
При выборе Mean absolute difference (MAD)блок согласования блоков оценивает смещение центрального пикселя блока как значения (d1, d2), которые минимизируют это уравнение MAD:
d1, n2 + d2, k + 1) |
Block size [height width] - Размер блока[17 17] (по умолчанию) | двухэлементный векторУкажите размер блока пикселов.
Overlap size [r c] - Перекрытие блоков[0 0] (по умолчанию) | двухэлементный векторУкажите перекрытие (в пикселях) двух разделов входного изображения.
Maximum displacement [r c] - Максимальное смещение[7 7] (по умолчанию) | двухэлементный векторУкажите максимальное количество пикселов, которое любой центральный пиксель в блоке пикселов может перемещаться от изображения к изображению или кадру к кадру. Блок использует это значение для определения размера области поиска.
Velocity output - Выходная скоростьMagnitude-squared (по умолчанию) | Horizontal and vertical components in complex formУкажите выходные данные. При выборе Magnitude-squaredблок выводит матрицу оптического потока, где каждый элемент имеет вид u2 + v2. При выбореHorizontal and vertical components in complex formблок выводит оптическую матрицу потока, где каждый элемент имеет форму jv. Действительная часть каждого значения представляет собой горизонтальную составляющую скорости, а мнимая часть каждого значения представляет собой вертикальную составляющую скорости.
Вкладка «Типы данных»
Дополнительные сведения о параметрах блока с фиксированной точкой см. в разделе Задание атрибутов блока с фиксированной точкой.
Типы данных |
|
Многомерные сигналы |
|
Сигналы переменного размера |
|
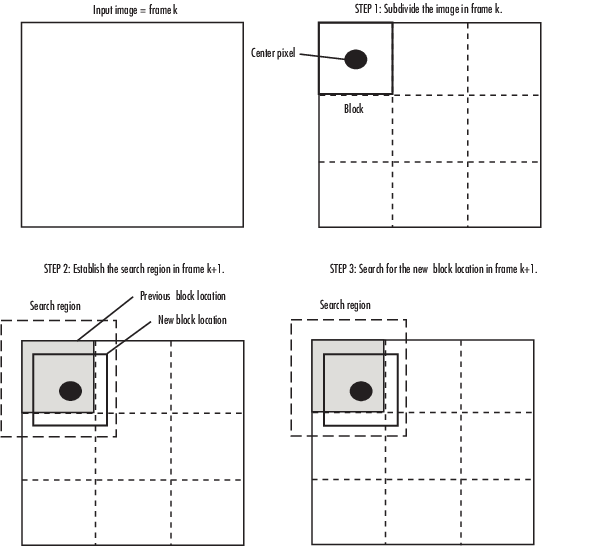
Предположим, что вход в блок является кадром k. Блок выполняет следующие шаги:
Разделите кадр, используя значения параметров Размер блока [ширина по высоте] и Размер перекрытия [r c]. В этом примере размер перекрытия [r c] равен [0 0].
Для каждого подразделения или блока в кадре k + 1 область поиска устанавливается на основе значения параметра Максимальное смещение [r c].
Поиск нового местоположения блока с помощью Exhaustive или Three-step способ поиска.
Оптический поток | opticalFlow | opticalFlowHS | opticalFlowLK | opticalFlowLKDoG

