Оценка скоростей объектов
Инструментарий для компьютерного зрения/Анализ и усовершенствование
Блок оптического потока оценивает направление и скорость движения объекта между двумя изображениями или между одним видеокадром и другим кадром с использованием метода Хорна-Шунка или Лукаса-Канаде.
Типы данных |
|
Многомерные сигналы |
|
Сигналы переменного размера |
|
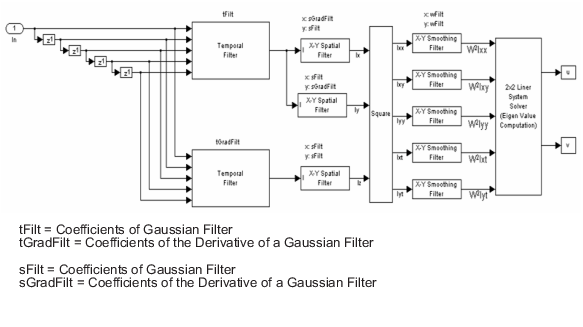
Если для фильтра временного градиента задано значение Derivative of Gaussianu и v решаются с использованием этих стадий.
Вычислите и .
Используйте фильтр Гаусса для выполнения временной фильтрации. Задайте характеристики временного фильтра, такие как стандартное отклонение и количество коэффициентов фильтра, используя параметр Количество кадров для буферизации параметра временного сглаживания.
Используйте фильтр Гаусса и производную фильтра Гаусса для сглаживания изображения с помощью пространственной фильтрации. Укажите стандартное отклонение и длину фильтра сглаживания изображения с помощью параметра «Стандартное отклонение для фильтра сглаживания изображения».
Вычислить изображениями 1 и 2.
Используйте производную гауссова фильтра для выполнения временной фильтрации. Задайте характеристики временного фильтра, такие как стандартное отклонение и количество коэффициентов фильтра, используя параметр Количество кадров для буферизации параметра временного сглаживания.
Используйте фильтр, описанный на этапе 1b, для выполнения пространственной фильтрации на выходе временного фильтра.
Сглаживайте компоненты градиента , и с помощью фильтра сглаживания градиента. Используйте параметр Стандартное отклонение для фильтра сглаживания градиента, чтобы указать стандартное отклонение и количество коэффициентов фильтра для фильтра сглаживания градиента.
Решите линейные уравнения 2 на 2 для каждого пикселя, используя следующий метод:
Если
тогда собственные значения A равны c) 22; i = 1,2
Когда блок находит собственные значения, он сравнивает их с пороговым значением,, соответствует значению, введенному для параметра Threshold for noise deduction. Результаты относятся к одному из следующих случаев.
Случай 1: и
A не является сингулярным, поэтому блок решает систему уравнений, используя правило Крамера.
Случай 2: и
A является сингулярным (неинвертируемым), поэтому блок нормализует градиентный поток для вычисления u и v.
Регистр 3:
оптический поток u и v равен 0.
Совпадение блоков | Гауссовская пирамида | opticalFlow | opticalFlowHS | opticalFlowLK | opticalFlowLKDoG
