Поиск шаблона на изображении
Инструментарий для компьютерного зрения/Анализ и усовершенствование
Блок «Соответствие шаблона» находит наилучшее соответствие шаблона входному изображению. Блок вычисляет соответствие значений метрик путем перемещения шаблона по интересующей области или всему изображению, а затем находит наилучшее расположение соответствия.
Блок выводит либо значения метрики соответствия, либо одноосновные координаты (x, y) наилучшего соответствия шаблона. Дополнительно блок может выводить матрицу N-на-N значений метрик соответствия, центрированных вокруг наилучшего местоположения соответствия.
Metric - Соответствие значений метрикМатрица значений метрик соответствия. Матрица метрик соответствия всегда реализует одношаговую исчерпывающую итерацию окна. Поэтому блок вычисляет значения метрик в каждом пикселе.
Если для параметра Output установлено значение Metric matrixблок выводит допустимый размер изображения.
Типы данных: single | double | uint8 | Boolean | fixed point
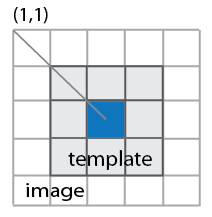
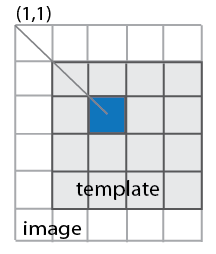
Loc - Лучшие места проведения матчейНаилучшее совпадение шаблона, расположенное в одноосновных координатах (x, y). В режиме обработки ROI блок рассматривает изображение вокруг ROI как расширение субрегиона ROI. Поэтому он вычисляет наилучшие местоположения соответствия, соответствующие фактическим границам ROI. Блок выводит наилучшие совпадающие координаты относительно верхнего левого угла изображения. Одноосновные координаты [x y] местоположения соответствуют центру шаблона. В следующей таблице показано, как блок выводит координаты центра для нечетных и четных шаблонов:
| Нечетное число пикселей в шаблоне | Четное число пикселей в шаблоне |
|---|---|
 |  |
Типы данных: uint32
NMetric - Метрические значения в окрестности наилучшего соответствияМетрические значения в окрестности наилучшего соответствия, возвращаемые в виде матрицы N-by-N. N, указанное в маске, должно быть нечетным числом. При выборе опции Расположение наилучшего соответствия (Best match location), чтобы вернуть матрицу метрик в окрестности вокруг наилучшего соответствия, исчерпывающий цикл вычисляет все значения метрик для окрестности N-на-N. Этот вывод особенно полезен для выполнения сопоставления шаблонов с точностью субпикселя.
Типы данных: single | double | uint8 | Boolean | fixed point
NValid - Действительный районВключить для отслеживания действительного соседнего региона. Матрица окрестности метрических значений действительна внутри ROI. Блок устанавливает выход NValid следующим образом:
1 - Район, содержащий лучшее совпадение, полностью находится внутри интересующего региона.
0 - Район, содержащий лучшее совпадение, полностью или частично находится за пределами интересующего региона.
Этот порт появляется при включении матрицы вывода NxN метрических значений вокруг параметра наилучшего соответствия.
Типы данных: Boolean
ROIValid - Действительный регион интересовПозволяет отслеживать действительную интересующую область. Если ROI частично находится вне допустимого изображения, блок обрабатывает только пересечение ROI и допустимого изображения. Блок устанавливает вывод ROIValid следующим образом:
1 - ROI полностью находится внутри допустимой части входного изображения.
0 - ROI полностью или частично находится вне допустимой части входного изображения.
Этот порт появляется при включении флага Output, указывающего, является ли параметр ROI допустимым.
Типы данных: Boolean
Главная вкладка
Match metric - Метрика соответствияSum of absolute differences (по умолчанию) | Sum of squared differences | Maximum absolute differenceВыберите метрику соответствия как одну из следующих:
Sum of absolute differences (SAD)
Sum of squared differences (ТВЕРДОТЕЛЬНЫЙ НАКОПИТЕЛЬ)
Maximum absolute difference (MaxAD)
Блок вычисляет метрику соответствия на каждом этапе итерации. Выберите метрику соответствия, которая лучше всего подходит вашему приложению. Блок вычисляет глобальный оптимум для наилучшего значения метрики. Он использует допустимую подобласть входного изображения, пересекаемую с ROI, если она предусмотрена.
Output - Метрика соответствияMatch metric (по умолчанию) | Best match locationВыберите тип вывода:
Match metric - вывод матрицы метрики соответствия. Эта опция добавляет выходной порт Metric в блок.
Best match location - Выведите координаты [x, y] для расположения наилучшего совпадения. Эта опция добавляет выходной порт Loc к блоку. Он также делает доступными метод поиска, матрицу вывода NxN метрических значений вокруг наилучшего соответствия и параметры обработки Enable ROI.
Параметр «Вывод» на панели «Типы данных» появляется при установке для параметра «Вывод» на вкладке «Главная» значения Metric matrix или если установлено значение Best match location и активизируется матрица вывода NxN метрических значений вокруг параметра наилучшего соответствия.
Search method - Метод поискаExhaustive (по умолчанию) | Three-stepУкажите метод поиска как Exhaustive или Three-step. Exhaustive способ поиска является вычислительно интенсивным, поскольку он выполняет поиск в каждом пиксельном местоположении изображения. Однако этот способ обеспечивает более точный результат.
Three-step метод поиска представляет собой быстрый поиск, который использует соседний подход по сравнению с поиском в каждом пикселе. Поиск начинается с размера шага, равного или немного превышающего половину максимального диапазона поиска, и затем выполняется следующее:
Блок сравнивает девять точек поиска на каждом шаге. Имеется центральная точка и восемь точек поиска, расположенных на границе области поиска.
Блок уменьшает размер шага на единицу после каждого шага, заканчивая поиск размером шага в один пиксель.
На каждом новом шаге блок перемещает центр поиска в наилучшую точку соответствия, полученную на предыдущем шаге. Синие круги номер один на рисунке ниже представляют поиск с размером начального шага три. Число два зеленых круга представляет следующий поиск с размером шага два, центрированный вокруг наилучшего совпадения, найденного в предыдущем поиске. Наконец, число три оранжевых круга представляют окончательный поиск с размером шага один, центрированный вокруг предыдущего наилучшего совпадения.
Этот параметр появляется при установке для параметра Output значения Best match location.
Output NxN matrix of metric values around best match - Выходная матрица N-за-N Активизируйте добавление портов NMetric и NValid.
Этот параметр появляется при установке для параметра Output значения Best match location.
N - Размер выходной матрицы3 (по умолчанию) | целое числоРазмер выходной матрицы. Это значение определяет размер выходной матрицы N-на-N, центрированной вокруг индекса местоположения наилучшего соответствия. N должно быть нечетным числом.
Этот параметр появляется при включении матрицы вывода NxN метрических значений вокруг параметра наилучшего соответствия.
Enable ROI processing - Включить обработку окупаемости инвестицийВключите обработку ROI.
Этот параметр появляется при установке для параметра Output значения Best match location.
При включении этого параметра блок добавляет входной порт ROI, и появляется флаг Output, указывающий, является ли ROI допустимым параметром.
Output flag indicating if ROI is valid - Действительная окупаемость инвестицийАктивизируйте добавление порта ROIValid.
Этот параметр появляется при включении параметра Enable ROI processing.
Вкладка «Типы данных»
Дополнительные сведения о параметрах блока с фиксированной точкой см. в разделе Задание атрибутов блока с фиксированной точкой.
Типы данных |
|
Многомерные сигналы |
|
Сигналы переменного размера |
|
[1] Кога Т., и др. Ал. Межкадровое кодирование с компенсацией движения для видеоконференций. В Национальной конференции по телекоммуникациям. Ноябрь 1981, G5.3.1-5, Новый Орлеан, Лос-Анджелес.
[2] Закай М., «Общие критерии расстояния» IEEE Transaction on Information Theory, pp. 94-95, январь 1964.
[3] Ю., Дж., Дж. Аморес, Н. Себе, К. Тиан, «Новое исследование по метрике расстояния как измерению подобия» Международная конференция IEEE по мультимедиа и экспо, 2006.
