Толкающий ремень, бесступенчатая коробка передач с независимым управлением по радиусам
Блок-набор силовых агрегатов/трансмиссия/системы трансмиссии
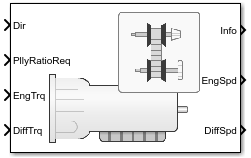
Блок Continuously Variable Transmission реализует ремень с непрерывной переменной передачей (CVT) с независимым управлением радиусами. Используйте блок для разработки системы управления, согласования силовых агрегатов и исследований экономии топлива. Можно сконфигурировать блок для внутреннего или внешнего управления:
Внутренний - Входное направление и запросы отношения шкивов
Внешний - Входное направление и запросы на перемещение шкива
В таблице представлены кинематические, скоростные и динамические вычисления шкива, выполненные блоком Continuously Variable Transmission.
| Вычисление | Кинематика шкива | Обратное и окончательное снижение скорости | Динамика |
|---|---|---|---|
| Конечное отношение угловой скорости | ✓ | ✓ | ✓ |
| Крутящий момент ремня, приложенный к вторичному и первичному шкивам | ✓ | ||
| Крутящий момент, приложенный к вторичному и первичному шкивам | ✓ | ||
| Скорость вращения вторичного и первичного шкивов | ✓ | ✓ | ✓ |
| Геометрия ремня и шкива | ✓ | ||
| Линейная скорость ремня | ✓ | ||
| Перенос на вторичном и первичном шкивах | ✓ | ||
| Радиусы первичного и вторичного шкивов | ✓ |
Рисунок показывает вариатор CVT с двумя строениями. В первом строении, которая иллюстрирует снижение скорости, вариатор устанавливается таким образом, чтобы уменьшить радиус первичного шкива и увеличить радиус вторичного шкива. Во втором строении, которая иллюстрирует переопределение, вариатор должен увеличить радиус первичного шкива и уменьшить радиус вторичного шкива.
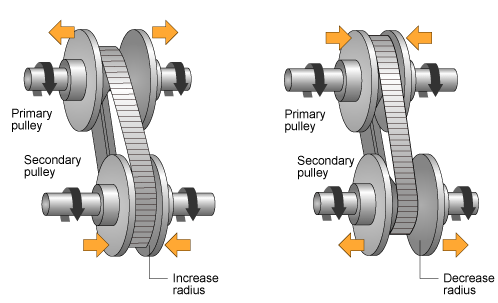
Используя физические размерности системы, блок вычисляет основные и вторичные положения вариатора, которые удовлетворяют запросу соотношения шкивов.
Рисунок и уравнения суммируют геометрические зависимости.
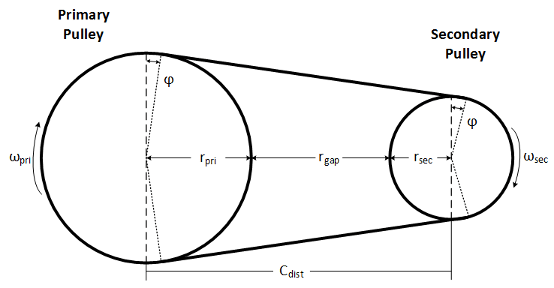
В уравнениях используются эти переменные.
| ratiorequest | Запрос передаточного числа шкива |
| ratiocommand | Команда передаточного числа шкива, основанная на запросе и физических ограничениях |
| rgap | Расстояние зазора между шкивами вариатора |
| Cdist | Расстояние между центрами шкивов вариатора |
| rpmax | Максимальный радиус первичного шкива вариатора |
| rsmax | Максимальный радиус вторичного шкива вариатора |
| rpmin | Минимальный радиус первичного шкива вариатора |
| rsmin | Минимальный радиус вторичного шкива вариатора |
| ro | Исходные радиусы шкивов с передаточным отношением |
| Lo | Начальная длина ремня, полученная из спецификации вариатора |
| xpri | Перемещение основного шкива вариатора, в результате запроса контроллера |
| xsec | Перемещение вторичного шкива вариатора, вызванное запросом контроллера |
| rpri | Радиус первичного шкива вариатора, полученный из запроса контроллера |
| rsec | Радиус вторичного шкива вариатора, полученный из запроса контроллера |
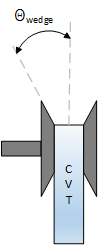
| Θwedge | Угол клина вариатора |
| Φ | Угол контакта ремня к точке контакта шкива |
| L | Длина ремня, вытекающая из положения вариатора |
Входной вал CVT соединяется с планетарной передачей, которая управляет основным шкивом. Направление сдвига определяет инерцию входа передачи, эффективность и передаточное отношение. Направление сдвига является отфильтрованным командным направлением:
Для прямого движения ():
Для обратного движения ():
Передаточное отношение и эффективность определяют скорость и крутящий момент входного вала, приложенные к первичному шкиву:
Блок уменьшает скорость вторичного шкива и прикладывает крутящий момент с помощью фиксированного передаточного числа.
Конечное передаточное число без скольжения определяется:
В уравнениях используются эти переменные.
| Ni | Входное планетарное передаточное отношение |
| Dir | Команда направления CVT |
| Dirshift | Направление, используемое для определения инерции планеты, эффективности и отношения |
| τs | Время сдвига направления константа |
| ηfwd, ηrev | Передняя и задняя эффективность, соответственно |
| Jfwd, Jrev | Инерция прямой и обратной передач, соответственно |
| Nrev | Передаточное число заднего хода |
| Tapp_pri, Tapp_sec | Крутящий момент, приложенный к первичному и вторичному шкивам, соответственно |
| Ti | Входной крутящий момент на валу |
| ωi, ωo | Вход и выходного привода вала, соответственно |
| ωpri, ωsec | Скорость первичного и вторичного шкивов, соответственно |
| Nfinal | Общее безскальзывающее передаточное число |
Максимальный крутящий момент, который может передать CVT, зависит от трения между шкивами и ремнем. Согласно Предсказанию Предела Привода Трения Металлического V-образного Ремня, трение крутящего момента определяется как:
Без макроскольжения тангенциальное ускорение шкива принято равным ускорению ремня. Когда крутящий момент достигает статического предела трения, ремень начинает скользить, и ускорение шкива и ремня является независимым. Во время скольжения крутящий момент, передаваемый ремнем, является функцией от кинетического коэффициента трения. Во время перехода от скольжения к нескользящим условиям скорости ремня и тангенциального шкива равны.
Блок реализует эти уравнения для четырех различных условий скольжения.
| Состояние | Уравнения |
|---|---|
|
Скольжения ремня как на вторичном, так и на первичном шкивах |
|
|
Скольжения ремня только на основном шкиве |
|
|
Скольжения ремня только на вторичном шкиве |
|
|
Ремень не скользит |
|
|
Направление скольжения |
|
В уравнениях используются эти переменные.
| TBoP_pri, TBoP_sec | Крутящий момент ремня, действующий на основной и вторичный шкивы, соответственно |
| Tapp_pri, Tapp_sec | Крутящий момент, приложенный к первичному и вторичному шкивам, соответственно |
| Jpri, Jsec | Инерция вращения первичного и вторичного шкивов, соответственно |
| bpri, bsec | Первичное и вторичное вращательное вязкое демпфирование шкива, соответственно |
| Fax | Сила прижима шкива |
| μ | Коэффициент трения |
| μkin, μstatic | Коэффициент кинетического и статического трения |
| vb, аb | Линейная скорость и ускорение ремня, соответственно |
| mb | Общая масса ремня |
| rpri, rsec | Радиусы первичного и вторичного шкивов, соответственно |
| Φwrap | Перенос угла ремня к контактной точке шкива |
| Φwrap_pri, Φwrap_sec | Переносы первичного и вторичного шкивов, соответственно |
Для учета степени, блок реализует эти уравнения.
| Сигнал шины | Описание | Переменная | Уравнения | ||
|---|---|---|---|---|---|
|
|
| Степень Engine | Peng | |
PwrDiffrntl | Дифференциальная степень | Pdiff | |||
|
| PwrBltLoss | Потери степени при скольжении ремня | Pbltloss | ||
PwrGearInLoss | Входная планетарная передача механических потерь степени | Pgrinloss | |||
PwrGearOutLoss | Механические потери мощности при снижении выходной степени | Pgroutloss | |||
PwrDampLoss | Механические потери демпфирования | Pdamploss | |||
|
| PwrStoredTrans | Изменение скорости во вращательной кинетической энергии | Pstr | ||
В уравнениях используются эти переменные.
| Tapp_pri, Tapp_sec | Крутящий момент, приложенный к первичному и вторичному шкивам, соответственно |
| Ti, To | Входной и выходной крутящий момент на валу, соответственно |
| Jpri, Jsec | Инерция вращения первичного и вторичного шкивов, соответственно |
| bpri, bsec | Первичное и вторичное вращательное вязкое демпфирование шкива, соответственно |
| ωpri, ωsec | Скорость первичного и вторичного шкивов, соответственно |
| ωi, ωo | Вход и выходного привода вала, соответственно |
| vb, аb | Линейная скорость и ускорение ремня, соответственно |
| rpri, rsec | Радиусы первичного и вторичного шкивов, соответственно |
Control mode - Внешний или внутреннийIdeal integrated controller (по умолчанию) | External controlЗадайте метод управления, внутренний или внешний.
В этой таблице представлены строения портов и входных моделей.
| Режим управления | Создает порты |
|---|---|
Ideal integrated controller |
|
External control |
|
Зазор между вторичным и первичным шкивами, rgap, в м. Рисунок показывает геометрию шкива.
Угол клина вариатора, Θwedge, в град.
Primary pulley inertia, J_pri - Инерция0.1 (по умолчанию) | scalarИнерция первичного шкива, Jpri, в кг· м ^ 2.
Secondary pulley inertia, J_sec - Инерция0.1 (по умолчанию) | scalarИнерция вторичного шкива, Jsec, в кг· м ^ 2.
Primary pulley damping coefficient, b_pri - Демпфирование0.001 (по умолчанию) | scalarКоэффициент демпфирования первичного шкива, bpri, в Н· м· с/рад.
Secondary pulley damping coefficient, b_sec - Демпфирование0.001 (по умолчанию) | scalarКоэффициент демпфирования вторичного шкива, bsec, в Н· м· с/рад.
Belt damping coefficient, b_b - Демпфирование0.0025 (по умолчанию) | scalarКоэффициент демпфирования ремня, bb, в кг/с.
Static friction coefficient, mu_static - Трение0.3 (по умолчанию) | scalarКоэффициент трения между ремнем и основным шкивом, μstatic, безразмерный.
Kinetic friction coefficient, mu_kin - Трение0.2 (по умолчанию) | scalarКоэффициент кинетического трения между ремнем и основным шкивом, μkin, безразмерный.
Belt mass, m_b - Масса3 (по умолчанию) | scalarМасса ремня, mb, в кг.
Pulley clamp force, F_ax - Сила прижима шкива5000 (по умолчанию) | scalarСила зажима шкива, Fax, в Н.
Forward inertia, J_fwd - Инерция0.1 (по умолчанию) | scalarИнерция вперед, Jfwd, в кг· м ^ 2.
Reverse inertia, J_rev - Инерция0.1 (по умолчанию) | scalarОбратная инерция, Jrev, в кг· м ^ 2.
Forward efficiency, eta_fwd - Эффективность0.95 (по умолчанию) | scalarПрямая эффективность, ηfwd, безразмерный.
Reverse efficiency, eta_rev - Эффективность0.95 (по умолчанию) | scalarОбратная эффективность, ηrev, безразмерный.
Reverse gear ratio, N_rev - Коэффициент2 (по умолчанию) | scalarПередаточное число, Nrev, безразмерное.
Shift time constant, tau_s - Константа.01 (по умолчанию) | scalarВремя сдвига константа, τs, в с.
Output gear ratio, N_o - Коэффициент2 (по умолчанию) | scalarПередаточное число на выходе, No, безразмерное.
Output gear efficiency, eta_o - Эффективность0.98 (по умолчанию) | scalarВыходная эффективность, ηo, безразмерный.
[1] Амбекар, Ашок Г. Механизм и теория машин. Нью-Дели: Prentice-Hall of India, 2007.
[2] Bonsen, B. Оптимизация Эффективности нажимного ремня с помощью управления скольжением вариатора. Доктор философии. Дипломная работа. Эйндховенский технологический университет, 2006 год.
[3] CVT Как это работает. CVT New Zealand 2010 Ltd, 10 Feb. 2011. Веб. 25 апреля 2016.
[4] Клаассен, Т. В. Г. Эмпакт CVT: динамика и управление электромеханически приводимым CVT. Доктор философии. Дипломная работа. Эйндховенский технологический университет, 2007 год.
[5] Сакагами, К. Предсказание предела фрикционного привода металлического V-образного ремня. Warrendale, PA: SAE International Journal of Engines 8 (3): 1408-1416, 2015.

