Непрерывно переменный контроллер передачи
Блок-набор силовых агрегатов/коробка передач/контроллеры трансмиссии
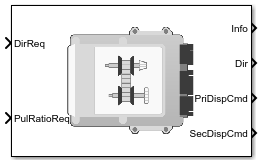
Блок CVT Controller реализует ремень с непрерывной переменной передачей (CVT) контроллер. Блок использует стандартный шкив и геометрические уравнения, чтобы вычислить кинематические уставки для вариатора CVT. Можно использовать блок для управления CVT.
Используя физические размерности системы, блок вычисляет основные и вторичные положения вариатора, которые удовлетворяют запросу отношения шкивов.
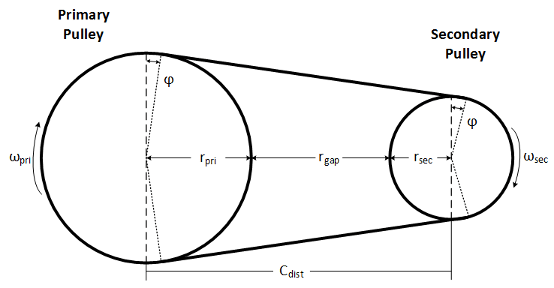
Рисунок и уравнения суммируют геометрические зависимости.
В уравнениях используются эти переменные.
| ratiorequest | Запрос передаточного числа шкива |
| ratiocommand | Команда передаточного числа шкива, основанная на запросе и физических ограничениях |
| rgap | Расстояние зазора между шкивами вариатора |
| Cdist | Расстояние между центрами шкивов вариатора |
| rpmax | Максимальный радиус первичного шкива вариатора |
| rsmax | Максимальный радиус вторичного шкива вариатора |
| rpmin | Минимальный радиус первичного шкива вариатора |
| rsmin | Минимальный радиус вторичного шкива вариатора |
| ro | Исходные радиусы шкивов с передаточным отношением |
| Lo | Начальная длина ремня, полученная из спецификации вариатора |
| xpri | Перемещение основного шкива вариатора, в результате запроса контроллера |
| xsec | Перемещение вторичного шкива вариатора, вызванное запросом контроллера |
| rpri | Радиус первичного шкива вариатора, полученный из запроса контроллера |
| rsec | Радиус вторичного шкива вариатора, полученный из запроса контроллера |
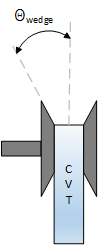
| Θwedge | Угол клина вариатора |
| Φ | Угол контакта ремня к точке контакта шкива |
| L | Длина ремня, вытекающая из положения вариатора |
Зазор между вторичным и первичным шкивами, rgap, в м. Рисунок показывает геометрию шкива.
Угол клина вариатора, Θwedge, в град.
[1] Амбекар, Ашок Г. Механизм и теория машин. Нью-Дели: Prentice-Hall of India, 2007.
[2] Bonsen, B. Оптимизация Эффективности нажимного ремня с помощью управления скольжением вариатора. Доктор философии. Дипломная работа. Эйндховенский технологический университет, 2006 год.
[3] CVT Как это работает. CVT New Zealand 2010 Ltd. 10 февраля 2011 года. Доступ получен 25 апреля 2016 года.
[4] Клаассен, Т. В. Г. Эмпакт CVT: динамика и управление электромеханически приводимым CVT. Доктор философии. Дипломная работа. Эйндховенский технологический университет, 2007 год.

