Контроллер для синхронного двигателя с постоянными магнитами на основе потока
Блок-набор силовых агрегатов/Двигатель/Регуляторы электродвигателя
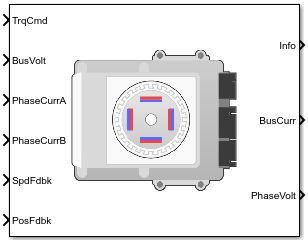
Блок Flux Based PM Controller реализует векторный векторный контроллер для внутреннего синхронного двигателя с постоянными магнитами (PMSM) с опциональным контроллером внешнего контура скорости. Внутреннее управление крутящим моментом реализует стратегии достижения максимального крутящего момента на ампер (MTPA) и ослабления магнитного потока. Можно задать тип управления скоростью или крутящим моментом.
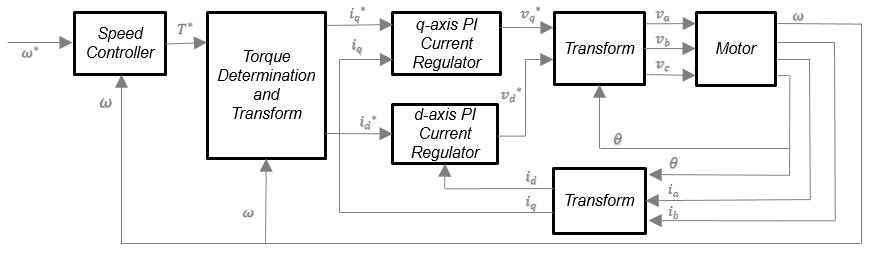
Этот Flux Based PM Controller реализует уравнения для регулирования скорости, определения крутящего момента, регуляторов, преобразований и двигателей.
Рисунок иллюстрирует информационный поток в блоке.
Блок реализует уравнения, используя эти переменные.
| ω |
Скорость ротора |
| ω* |
Команда скорости ротора |
| T* |
Команда крутящего момента |
|
id i*d |
d-составляющая тока d-составляющая тока команды |
|
iq i*q |
q-составляющая тока q-составляющая тока команды |
|
vd, v*d |
d-составляющая напряжения d-составляющая напряжения команды |
|
vq v*q |
q-составляющая напряжения команда q-axis voltage |
| va, vb, vc |
Фазы статора a, b, c напряжений |
| ia, ib, ic |
Фазы статора a, b, c токи |
Чтобы реализовать контроллер скорости, выберите параметр Control Type Speed Control. Если вы выбираете параметр Control Type Torque Controlблок не реализует контроллер скорости.
Контроллер скорости определяет команду крутящего момента, реализуя фильтр состояния и вычисляя команды feedforward и обратной связи. Если вы не реализуете контроллер скорости, введите команду крутящего момента в блок Flux Based PM Controller.
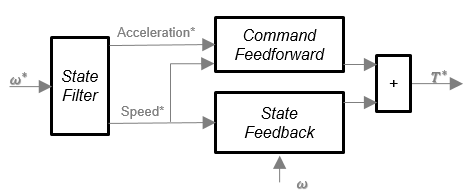
Фильтр состояния является lowpass фильтром, который генерирует команду ускорения на основе команды скорости. Дискретная форма характеристического уравнения задается:
Фильтр вычисляет коэффициент усиления, используя это уравнение.
В уравнениях используются эти переменные.
| EVsf |
Шумовая полоса командного фильтра скорости |
| Tsm |
Устройство управления движением шага расчета |
| Ksf |
Постоянная времени регулятора скорости |
Чтобы сгенерировать крутящий момент обратной связи состояния, блок использует отфильтрованный сигнал ошибки скорости от фильтра состояния. Чтобы фильтровать скорость, блок использует пропорциональный интегральный (PI) контроллер.
В уравнениях используются эти переменные.
| ωm |
Скорость ротора |
| ω*m |
Команда скорости ротора |
| Tcmd |
Команда крутящего момента |
| Kpω |
Пропорциональная составляющая регулятора скорости |
| Kiω |
Интегральная составляющая регулятора скорости |
| Tsm |
Выборка регулятора скорости |
Чтобы сгенерировать крутящий момент с прямой связью состояний, блок использует фильтрованные скорость и ускорение от фильтра с прямой связью состояний. Кроме того, при вычислении крутящего момента с прямой связью используются инерция, вязкое демпфирование и статическое трение. Чтобы достичь нулевой ошибки отслеживания, команда крутящего момента является суммой команд крутящего момента с feedforward и обратной связью.
Команда крутящего момента с прямой связью использует это уравнение.
где:
| Jp |
Инерция ротора |
| Tcmd_ff |
Команда крутящего момента с feedforward |
| Fs |
Статический крутящий момент трения |
| Fv |
Вязкий крутящий момент трения, константа |
| Fs |
Статический крутящий момент трения |
| ωm |
Скорость ротора |
Блок использует интерполяционные таблицы, чтобы определить команды тока по оси D и оси Q. Интерполяционные таблицы являются функциями механической скорости и крутящего момента. Чтобы определить интерполяционные таблицы, можно использовать внешние модели анализа конечных элементов (FEA) или результаты тестирования динамометра.
В уравнениях используются эти переменные.
| ωm |
Скорость ротора |
| Tref |
Команда крутящего момента |
| idref, iqref |
d- и q-составляющие опорного тока, соответственно |
Блок использует эти уравнения, чтобы вычислить напряжение в исходной системе координат мотора.
В уравнениях используются эти переменные.
|
ωm |
Механическая скорость ротора |
|
ωe | Электрическая скорость ротора |
|
Rs, Rr |
Сопротивление обмоток статора и ротора, соответственно |
|
iq, id |
ток q- и d-осей, соответственно |
|
vq, vd |
q- и d-напряжения, соответственно |
| Ψq, Ψd |
q- и d-составляющие потоки магнитов, соответственно |
| Tst |
Выборка регулятора тока |
| Kid , Kiq |
d- и q- оси интегральной составляющей, соответственно |
| Kpd , Kpq |
d- и q- оси пропорциональной составляющей, соответственно |
Чтобы вычислить напряжения и токи в сбалансированных трехфазных (a, b) величинах, квадратурных двухфазных (α, β) величинах и вращающихся (d, q) опорных системах координат, блок использует Преобразования Кларка и Парка.
В уравнениях преобразования.
| Преобразовать | Описание | Уравнения |
|---|---|---|
|
Кларк |
Преобразует сбалансированные трехфазные величины (a, b) в сбалансированные двухфазные квадратурные величины (α, β). | |
|
Парк |
Преобразует сбалансированные двухфазные ортогональные стационарные величины (α, β) в ортогональную вращающуюся опорную систему координат (d, q). | |
|
Обратный Кларк |
Преобразует сбалансированные двухфазные квадратурные величины (α, β) в сбалансированные трехфазные величины (a, b). | |
|
Обратный парк |
Преобразует ортогональную вращающуюся опорную систему координат (d, q) в сбалансированные двухфазные ортогональные стационарные величины (α, β). |
Преобразования используют эти переменные.
| ωm |
Скорость ротора |
| P |
Пары полюсов ротора |
| ωe |
Электрическая скорость ротора |
| Θe |
Электрический угол ротора |
| x |
Ток фазы или напряжение |
Блок использует токи фазы и напряжения фазы, чтобы оценить ток шины постоянного тока. Положительный ток указывает на разряд батареи. Отрицательный ток указывает на заряд батареи.
Блок использует эти уравнения.
|
Загрузка степени | |
|
Исходный код степени | |
|
Ток шины постоянного тока | |
|
Расчетный крутящий момент ротора | |
|
Потеря степени для одного источника эффективности для загрузки | |
|
Потеря степени для одной нагрузки эффективности к источнику | |
|
Потери степени для табличной эффективности |
В уравнениях используются эти переменные.
| va, vb, vc |
Фазы статора a, b, c напряжений |
| vbus |
Расчетное напряжение шины постоянного тока |
| ia, ib, ic |
Фазы статора a, b, c токи |
| ibus |
Расчетный ток шины постоянного тока |
| Eff |
Общая эффективность инвертора |
| ωm |
Механическая скорость ротора |
| Lq, Ld |
q- и d-составляющие индуктивность обмотки, соответственно |
| Ψq, Ψd |
q- и d-составляющие потоки магнитов, соответственно |
| iq, id |
ток q- и d-осей, соответственно |
| λ |
Потоки постоянных магнитов редактирования |
| P |
Пары полюсов ротора |
Чтобы задать электрические потери, на вкладке Electrical Losses, для Parameterize losses by, выберите одну из следующих опций.
| Настройка | Реализация блока |
|---|---|
Single efficiency measurement | Электрические потери, рассчитанные с использованием постоянного значения для эффективности инвертора. |
Tabulated loss data | Электрические потери, рассчитанные как функция от скоростей двигателя и крутящих моментов нагрузки. |
Tabulated efficiency data | Электрические потери, рассчитанные с использованием эффективности инвертора, который является функцией скоростей двигателя и крутящих моментов нагрузки.
|
Для наилучшей практики используйте Tabulated loss data вместо Tabulated efficiency data:
Эффективность становится плохо заданным для нулевой скорости или нулевого крутящего момента.
Вы можете принять во внимание фиксированные потери, которые все еще присутствуют для нулевой скорости или крутящего момента.
[1] Hu, Dakai, Yazan Alsmadi, and Longya Xu. «Высокоточное нелинейное моделирование IPM на основе измеренных редактирований потока обмотки статора». IEEE® Сделки по отраслевым приложениям, том 51, № 4, июль/август 2015 года.
[2] Чен, Сяо, Джиэбин Ван, Bhaskar сенатор, Панайотис Лазари, Tianfu Солнце. «Высокочастотная и в вычислительном отношении эффективная модель для внутренних машин постоянного магнита, рассматривая магнитное насыщение, пространственную гармонику и эффект потери в железе». Сделки IEEE по промышленной электронике, том 62, № 7, июль 2015 года.
[3] Оттоссон, Дж., М. Алакула. «Компактная реализация контроллера ослабления поля». Международный симпозиум по степени, электроприводам, автоматизации и движению, июль 2006 года.
