Векторный контроллер на основе крутящего момента для синхронного двигателя с внутренними постоянными магнитами
Блок-набор силовых агрегатов/Двигатель/Регуляторы электродвигателя
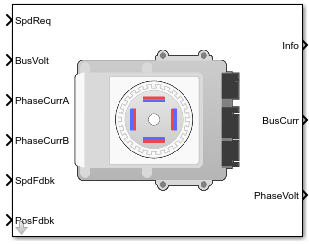
Блок Interior PM Controller реализует векторный контроллер для внутреннего синхронного двигателя с постоянными магнитами (PMSM) с опциональным контроллером скорости внешнего контура. Внутреннее управление крутящим моментом реализует стратегии достижения максимального крутящего момента на ампер (MTPA) и ослабления магнитного потока. Можно задать тип управления скоростью или крутящим моментом.
Этот Interior PM Controller реализует уравнения для регулирования скорости, определения крутящего момента, регуляторов, преобразований и двигателей.
Рисунок иллюстрирует информационный поток в блоке.
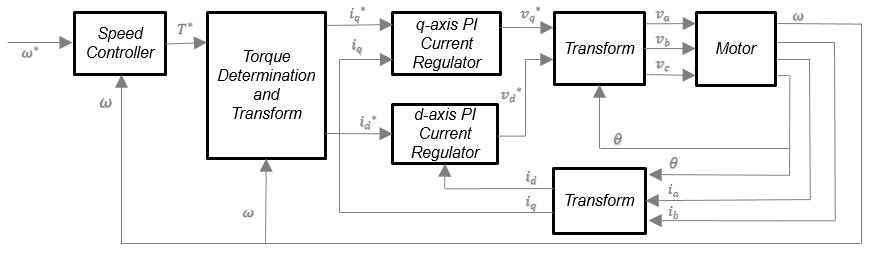
Блок реализует уравнения, которые используют эти переменные.
| ω | Скорость ротора |
| ω* | Команда скорости ротора |
| T* | Команда крутящего момента |
id i*d | d-составляющая тока d-составляющая тока команды |
iq i*q | q-составляющая тока q-составляющая тока команды |
vd, v*d | d-составляющая напряжения d-составляющая напряжения команды |
vq v*q | q-составляющая напряжения команда q-axis voltage |
| va, vb, vc | Фазы статора a, b, c напряжений |
| ia, ib, ic | Фазы статора a, b, c токи |
Чтобы реализовать контроллер скорости, выберите параметр Control Type Speed Control. Если вы выбираете параметр Control Type Torque Controlблок не реализует контроллер скорости.
Контроллер скорости определяет команду крутящего момента, реализуя фильтр состояния и вычисляя команды feedforward и обратной связи. Если вы не реализуете контроллер скорости, введите команду крутящего момента в блок Interior PM Controller.
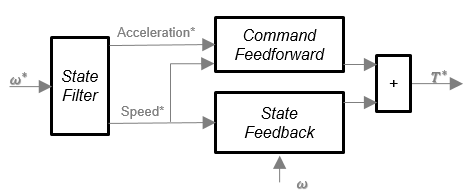
Фильтр состояния является lowpass фильтром, который генерирует команду ускорения на основе команды скорости. На вкладке Speed Controller:
Чтобы сделать время задержки команды скорости незначительным, задайте параметр Bandwidth of the state filter.
Чтобы вычислить коэффициент усиления Speed regulation time constant, Ksf на основе полосы пропускания фильтра состояний, выберите Calculate Speed Regulator Gains.
Дискретная форма характеристического уравнения задается:
Фильтр вычисляет коэффициент усиления, используя это уравнение.
В уравнениях используются эти переменные.
| EVsf | Шумовая полоса командного фильтра скорости |
| Tsm | Устройство управления движением шага расчета |
| Ksf | Постоянная времени регулятора скорости |
Чтобы сгенерировать крутящий момент обратной связи состояния, блок использует отфильтрованный сигнал ошибки скорости от фильтра состояния. Для вычисления крутящего момента обратной связи также требуются усиления для регулятора скорости.
На вкладке Speed Controller выберите Calculate Speed Regulator Gains для вычисления:
Proportional gain, ba
Angular gain, Ksa
Rotational gain, Kisa
Для вычисления усиления блок использует инерцию из значения параметров Physical inertia, viscous damping, static friction на вкладке Motor Parameters.
Усиления для обратной связи состояния вычисляются с помощью этих уравнений.
| Вычисление | Уравнения |
|---|---|
| Дискретные формы характеристического уравнения | |
Пропорциональная составляющая регулятора скорости | |
Интегральная составляющая регулятора скорости | |
Регулятор скорости двойная интегральная составляющая |
В уравнениях используются эти переменные.
| P | Пары шестов двигателей |
| ba | Пропорциональная составляющая регулятора скорости |
| Ksa | Интегральная составляющая регулятора скорости |
| Kisa | Регулятор скорости двойная интегральная составляющая |
| Jp | Инерция двигателя |
| Tsm | Устройство управления движением шага расчета |
Чтобы сгенерировать крутящий момент с прямой связью состояний, блок использует фильтрованные скорость и ускорение от фильтра с прямой связью состояний. Кроме того, при вычислении крутящего момента с прямой связью используются инерция, вязкое демпфирование и статическое трение. Чтобы достичь нулевой ошибки отслеживания, команда крутящего момента является суммой команд крутящего момента с feedforward и обратной связью.
Выбор Calculate Speed Regulator Gains на вкладке Speed Controller обновляет инерцию, вязкое демпфирование и статическое трение значениями параметров Physical inertia, viscous damping, static friction на вкладке Motor Parameters.
Команда крутящего момента с прямой связью использует это уравнение.
где:
| Jp | Инерция двигателя |
| Tcmd_ff | Команда крутящего момента с feedforward |
| Fs | Статический крутящий момент трения |
| Fv | Вязкий крутящий момент трения, константа |
| Fs | Статический крутящий момент трения |
| ωm | Скорость ротора |
Блок использует максимальный крутящий момент на ампер (MTPA), чтобы вычислить номинальную скорость и текущие команды. Доступное напряжение шины определяет номинальную скорость. Прямой (d) и квадратурный (q) постоянные магниты (PM) определяют индуцированное напряжение.
| Вычисление | Уравнения |
|---|---|
| Переход номинальной скорости в ослабление поля | |
| d-составляющая напряжения | |
| q-составляющая напряжения | |
| Максимальный ток фазы | |
| Максимальная линия к нейтральному напряжению | |
| d-составляющая таблица тока фазы MTPA | |
| Таблица MTPA тока q-составляющей фазы | |
| Крутящие моменты точек прерывания MTPA | |
| Ослабление поля, использование основанных на скорости пределов напряжения | |
| Текущая команда | If Еще Если Еще Конец Конец |
В уравнениях используются эти переменные.
| imax | Максимальный ток фазы |
| id | d-составляющая тока |
| iq | q-составляющая тока |
| id_max | Максимальный ток фазы по оси D |
| iq_max | Максимальный ток фазы по оси Q |
| id_mtpa | d-составляющая таблица тока фазы MTPA |
| iq_mtpa | Таблица MTPA тока q-составляющей фазы |
| Im | Расчетный максимальный ток |
| idfw | d-составляющая тока ослабления поля |
| iqfw | ток ослабления поля q-составляющей тока |
| ωe | Электрическая скорость ротора |
| λpm | Потоки постоянных магнитов редактирования |
| vd | d-составляющая напряжения |
| vq | q-составляющая напряжения |
| vmax | Максимальная линия к нейтральному напряжению |
| vbus | Напряжение шины постоянного тока |
| Ld | d-составляющая индуктивность обмотки |
| Lq | q-составляющая индуктивность обмотки |
| P | Пары шестов двигателей |
| Tfw | Крутящий момент ослабления поля |
| Tmtpa | Крутящие моменты точек прерывания MTPA |
Блок регулирует ток с помощью функции защиты от насыщения. Классические регуляторы тока пропорционального интегратора (PI) не рассматривают d-осевую и q-осевую связь или обратную электромагнитную силу (EMF) связь. В результате эффективность переходного процесса ухудшается. Для расчета связи блок реализует комплексный векторный регулятор тока (CVCR) в скалярном формате исходной системы координат ротора. CVCR разделяется:
d-составляющая и q-составляющая поперечная муфта тока
Поперечная муфта Back-EMF
Текущая частотная характеристика является системой первого порядка с шириной полосы EVcurrent.
Блок реализует эти уравнения.
| Вычисление | Уравнения |
|---|---|
| Напряжение двигателя, в исходной системе координат ротора | |
| Усиления регулятора тока | |
| Передаточные функции |
В уравнениях используются эти переменные.
| EVcurrent | Пропускная способность регулятора тока |
| id | d-составляющая тока |
| iq | q-составляющая тока |
| Kp_d | Коэффициент усиления регулятора тока d-составляющей тока |
| Kp_q | Коэффициент усиления регулятора тока |
| Ld | d-составляющая индуктивность обмотки |
| Lq | q-составляющая индуктивность обмотки |
| Rs | Сопротивление обмотки фазы статора |
| ωm | Скорость ротора |
| vd | d-составляющая напряжения |
| vq | q-составляющая напряжения |
| λpm | Потоки постоянных магнитов редактирования |
| P | Пары шестов двигателей |
Чтобы вычислить напряжения и токи в сбалансированных трехфазных (a, b) величинах, квадратурных двухфазных (α, β) величинах и вращающихся (d, q) опорных системах координат, блок использует Преобразования Кларка и Парка.
В уравнениях преобразования.
| Преобразовать | Описание | Уравнения |
|---|---|---|
Кларк | Преобразует сбалансированные трехфазные величины (a, b) в сбалансированные двухфазные квадратурные величины (α, β). | |
Парк | Преобразует сбалансированные двухфазные ортогональные стационарные величины (α, β) в ортогональную вращающуюся опорную систему координат (d, q). | |
Обратный Кларк | Преобразует сбалансированные двухфазные квадратурные величины (α, β) в сбалансированные трехфазные величины (a, b). | |
Обратный парк | Преобразует ортогональную вращающуюся опорную систему координат (d, q) в сбалансированные двухфазные ортогональные стационарные величины (α, β). |
Преобразования используют эти переменные.
| ωm | Скорость ротора |
| P | Пары шестов двигателей |
| ωe | Электрическая скорость ротора |
| Θe | Электрический угол ротора |
| x | Ток фазы или напряжение |
Блок использует токи фазы и напряжения фазы, чтобы оценить ток шины постоянного тока. Положительный ток указывает на разряд батареи. Отрицательный ток указывает на заряд батареи. Блок использует эти уравнения.
|
Загрузка степени | |
|
Исходный код степени | |
|
Ток шины постоянного тока | |
|
Расчетный крутящий момент ротора | |
|
Потеря степени для одного источника эффективности для загрузки | |
|
Потеря степени для одной нагрузки эффективности к источнику | |
|
Потери степени для табличной эффективности |
В уравнениях используются эти переменные.
| va, vb, vc |
Фазы статора a, b, c напряжений |
| vbus |
Расчетное напряжение шины постоянного тока |
| ia, ib, ic |
Фазы статора a, b, c токи |
| ibus |
Расчетный ток шины постоянного тока |
| Eff |
Общая эффективность инвертора |
| ωm |
Механическая скорость ротора |
| Lq |
q-составляющая индуктивность обмотки |
| Ld |
d-составляющая индуктивность обмотки |
| iq |
q-составляющая тока |
| id |
d-составляющая тока |
| λ |
Потоки постоянных магнитов редактирования |
| P |
Пары шестов двигателей |
Чтобы задать электрические потери, на вкладке Electrical Losses, для Parameterize losses by, выберите одну из следующих опций.
| Настройка | Реализация блока |
|---|---|
Single efficiency measurement | Электрические потери, рассчитанные с использованием постоянного значения для эффективности инвертора. |
Tabulated loss data | Электрические потери, рассчитанные как функция от скоростей двигателя и крутящих моментов нагрузки. |
Tabulated efficiency data | Электрические потери, рассчитанные с использованием эффективности инвертора, который является функцией скоростей двигателя и крутящих моментов нагрузки.
|
Для наилучшей практики используйте Tabulated loss data вместо Tabulated efficiency data:
Эффективность становится плохо заданным для нулевой скорости или нулевого крутящего момента.
Вы можете принять во внимание фиксированные потери, которые все еще присутствуют для нулевой скорости или крутящего момента.
[1] Лоренц, Роберт Д., Томас Липо и Дональд В. Новотни. «Управление движением с асинхронными двигателями». Материалы IEEE®, том 82, выпуск 8, август 1994, стр. 1215-1240.
[2] Моримото, Сигео, Масаюка Санада и Ёдзи Такэда. «Широкоскоростная операция синхронных двигателей с постоянными магнитами с высокопроизводительным регулятором тока». Транзакции IEEE по отраслевым приложениям, том 30, выпуск 4, июль/август 1994 года, стр. 920-926.
[3] Ли, Муян. Управление ослаблением потока синхронных двигателей с постоянными магнитами на основе инверторов Z-источника. Магистерская диссертация, Marquette University, e-Publications @ Marquette, осень 2014.
[4] Бриз, Фернандо, Майкл В. Дегнер и Роберт Д. Лоренц. «Анализ и проект регуляторов тока с использованием сложных векторов». Транзакции IEEE по отраслевым приложениям, том 36, выпуск 3, май/июнь 2000 года, стр. 817-825.
[5] Briz, Fernando, et al. «Регулирование тока и потока в работе с ослаблением поля [асинхронных двигателей]». Транзакции IEEE по промышленным применениям, том 37, выпуск 1, январь/февраль 2001, стр. 42-50.
