Параллельная пружина-демпфер
Силовой агрегат Blockset/Drivetrain/Муфты
Динамика автомобиля Blockset/Powertrain/Drivetrain/Муфты
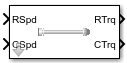
Блок Torsional Compliance реализует параллельную пружину-демпфер, чтобы соединить два вращающихся приводных вала. Блок использует скорости вращения приводного вала, крутильную жесткость и крутильное демпфирование, чтобы определить крутящие моменты.
Для учета степени, блок реализует эти уравнения.
| Сигнал шины | Описание | Переменная | Уравнения | ||
|---|---|---|---|---|---|
|
|
| Механическая степень от приводного вала R | PTR | |
PwrC | Механическая степень от приводного вала C | PTC | |||
|
| PwrDampLoss | Механические потери демпфирования | Pd | ||
|
| PwrStoredShft | Изменение скорости в энергии весны | PS | ||
В уравнениях используются эти переменные.
| TR | Крутящий момент на валу R |
| TC | Крутящий момент на валу С |
| ωR | Приводной вал R скорости вращения |
| ωC | Демпфирующий вал C скорости вращения |
| θ | Вращение связанного приводного вала |
| k | Крутящая жесткость приводного вала |
| b | Вращательное вязкое демпфирование |
| Pd | Потеря степени из-за демпфирования |
| Ps | Изменение скорости сохраненной энергии пружины |
