В этом примере показано, как использовать блок Drive Cycle Source для идентификации отказов цикла привода, когда вы запускаете обычный пример готовых узлов транспортного средства с FTP–75 цикл привода.
Откройте проект обычного примера готовых узлов транспортного средства. По умолчанию приложение имеет FTP–75 цикл дисковода с отключенным отслеживанием ошибок.
Откройте Drive Cycle Source блок. На вкладке Fault Tracking выберите следующие параметры:
Enable fault tracking
Enable failure tracking
Проверьте параметры, которые определяют условия отказа и отказа. Если скорость транспортного средства не находится в допустимой области значений скоростей в течение временного допуска, блок устанавливает условие отказа. Примите настройки параметров расписания движения динамометра EPA по умолчанию, нажав OK.
В этой таблице приведены настройки для стандарта EPA и лабораторных испытаний Всемирной согласованной процедуры тестирования легких транспортных средств (WLTP).
| Параметр | Описание | Настройка | |
|---|---|---|---|
Стандарт EPA1 | Тесты WLTP2 | ||
Speed tolerance | Допуск скорости выше наивысшей точки и ниже самой нижней точки трассировки скорости цикла привода в пределах временного допуска. | 2.0 mph | 2.0 км/ч |
Time tolerance | Время, которое блок использует для определения допуска скорости. | 1,0 с | 1,0 с |
| Maximum number of faults | Максимальное количество отказов во время цикла привода. | Не задан | 10 |
| Maximum single fault time | Максимальная длительность отказа. | 2.0 с | 1,0 с |
| Maximum total fault time | Максимальное время нахождения в условии отказа. | Не задан | Не задан |
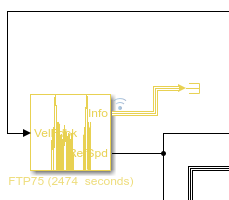
Соедините сигнал продольной скорости транспортного средства с блоком Drive Cycle Source VelFdbk входной порт.
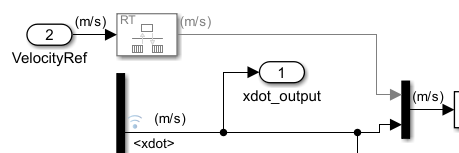
В Подсистеме Визуализации соедините сигнал продольной скорости, <xdot>, в Выходной порт с именем xdot_output.
Определите <xdot> сигнальные модули. Чтобы отобразить модули измерения сигнала, на вкладке Debug, выберите Information Overlays > Units. The <xdot> модулями сигнала являются м/с.
Выберите <xdot> сигнальная линия и Enable Data Logging.
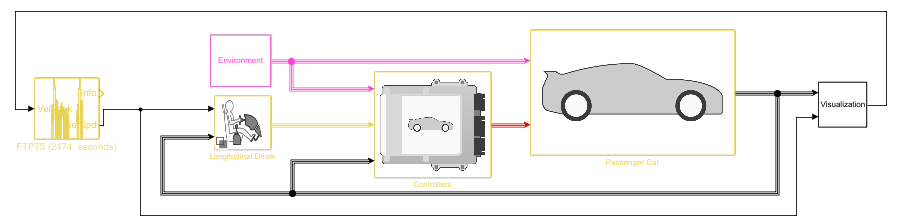
На верхнем уровне модели соедините выход Визуализации с входом блока Drive Cycle Source.
Соедините Drive Cycle Source блок Info выходной порт для порта Terminator. Включите логгирование данных.
Сохраните модель и запустите симуляцию.
Для просмотра результатов используйте Data Inspector. В Simulink® Панель инструментов, на вкладке Simulation, под Review Results, нажмите Data Inspector.
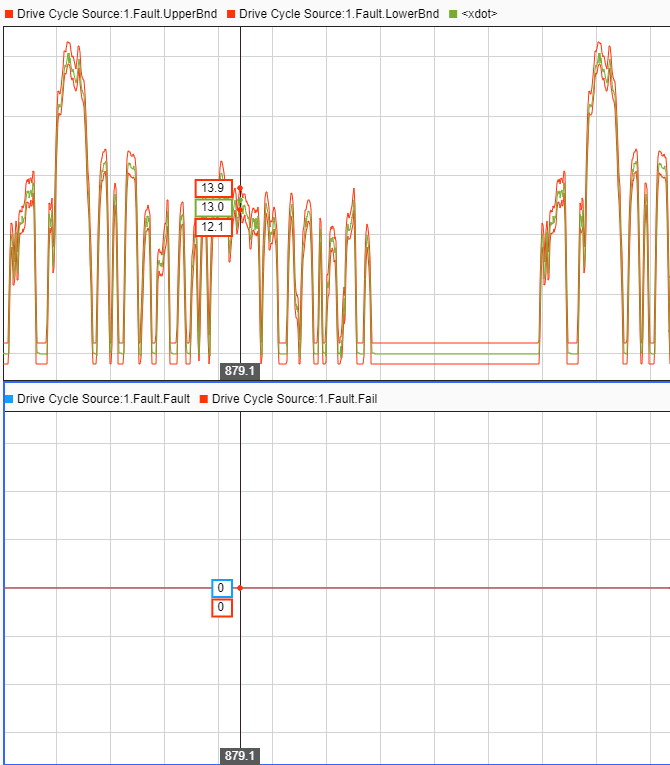
Эти результаты показывают, что блок Drive Cycle Source не обнаружил отказов или отказов во время цикла дисковода.
Fault - Скорость транспортного средства, <xdot>, находится в пределах верхней и нижней границы допустимой области значений скоростей.
Fail - Условия отказа не превышали максимальное количество отказов, максимальное единичное время отказа или максимальное общее время отказа.
В блоке Drive Cycle Source установите параметр Speed tolerance более жесткий допуск, например, 1 миль в час. Блок вычисляет новые границы ошибок для скорости.
Перезапустите симуляцию.
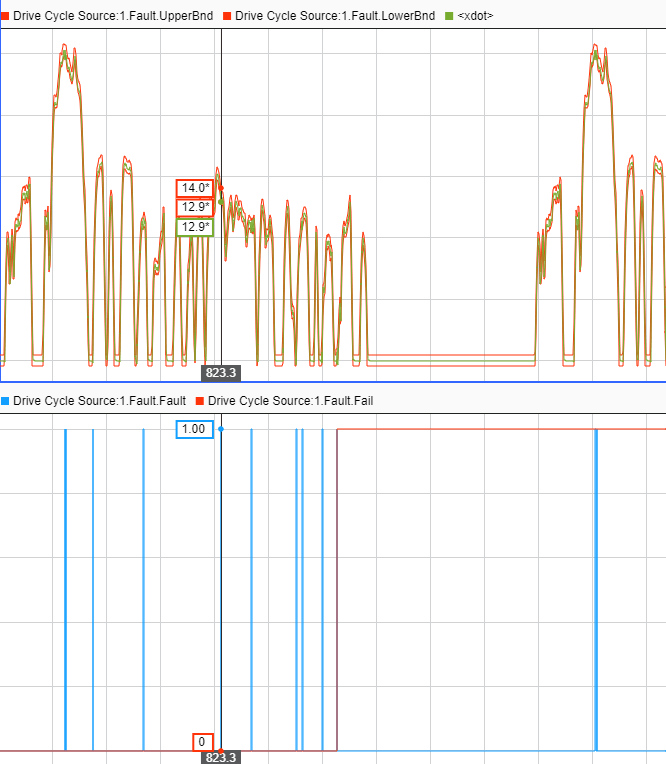
Для просмотра результатов используйте Data Inspector. Эти результаты показывают, что блок Drive Cycle Source действительно обнаружил сбои и отказы во время цикла дисковода.
Fault - Скорость транспортного средства, <xdot>, не находился в пределах верхней и нижней границы допустимой области значений скоростей.
Fail - Условия отказа превышали максимальное количество отказов, максимальное единичное время отказа или максимальное общее время отказа.
[1] Агентство по охране окружающей среды (EPA). График движения городского динамометра EPA. 40 CFR 86.115-78, 1 июля 2001 года.
[2] Комиссия Европейского союза. «Скорость трассировки допусков». Регламент Комиссии Европейского союза. 32017R1151, Sec 1.2.6.6, 1 июня 2017 года.
