Стандартный или заданный цикл продольного привода
Powertrain Blockset/Построитель сценариев автомобиля
Динамика автомобиля транспортное средство цикл и маневры
Блок Drive Cycle Source генерирует стандартный или заданный пользователем цикл продольного привода. Выходным выходом блока является заданная продольная скорость транспортного средства, которую можно использовать для:
Предсказать крутящий момент двигателя и расход топлива, которые требуются транспортному средству для достижения желаемой скорости и ускорения для заданной ссылки сдвига передач.
Получите реалистичные ссылки скорости и сдвига для команд ускорения и торможения замкнутого цикла для управления и моделей объекта управления автомобиля.
Изучайте, настраивайте и оптимизируйте управление автомобилем, производительность системы и робастность системы в течение нескольких циклов привода.
Идентифицируйте отказы в пределах допусков, заданных стандартизированными испытаниями, включая:
Графики движения динамометра EPA1
Всемирные лабораторные испытания Согласованной процедуры тестирования легких транспортных средств (WLTP)2
Для циклов привода можно использовать:
Дисковые циклы из предопределенных источников. По умолчанию блок включает в себя FTP–75 цикл привода. Для установки дополнительных циклов дисков из пакета поддержки смотрите Install Drive Cycle Data. Пакет поддержки имеет приводные циклы, которые включают в себя графики сдвига передач, например JC08 и CUEDC.
Переменные рабочей области, которые определяют ваши собственные дисковые циклы.
. mat. xls. xlsx, или txt файлы.
Широкооткрытые параметры дросселя (WOT), включая начальную и номинальную задающую скорость, время начала замедления и конечную задающую скорость.
Для достижения целей, перечисленных в таблице, используйте указанные Drive Cycle Source опции параметров блоков.
| Цель | Действие |
|---|---|
Повторите цикл привода, если время запуска симуляции превышает длину цикла привода. | Выберите Repeat cyclically. |
Вывод ускорения, как вычислено дифференцировкой Савицкого-Голея. | Выберите Output acceleration. |
Задайте период дискретизации для дискретных приложений. | Задайте параметр Output sample period (0 for continuous), dt. |
Обновите время запуска симуляции так, чтобы оно равнялось длине цикла привода. | Нажмите Update simulation time. Если ссылка на строение модели существует, блок не включает эту опцию. |
Постройте график цикла дисков в MATLAB® рисунок. | Нажмите Plot drive cycle. |
Задайте цикл дисковода с помощью переменной рабочей области. | Нажмите Specify variable. Блок:
Задайте переменную рабочей области так, чтобы она содержала время, скорость и, опционально, график сдвига передач. Для примеров смотрите Создание циклов дисков с использованием переменных рабочей области. |
Задайте цикл дисков с помощью файла. | Нажмите Select file. Блок:
Укажите файл, который содержит время, скорость и, опционально, график сдвига передач. |
Выходной привод цикла передачи. |
Задайте цикл привода, который содержит график сдвига передач. Вы можете использовать:
Нажмите Output gear shift data. |
Установите дополнительные циклы привода из пакета поддержки. | Нажмите Install additional drive cycles. Блок включает параметр, если можно установить дополнительные циклы дисков из пакета поддержки. |
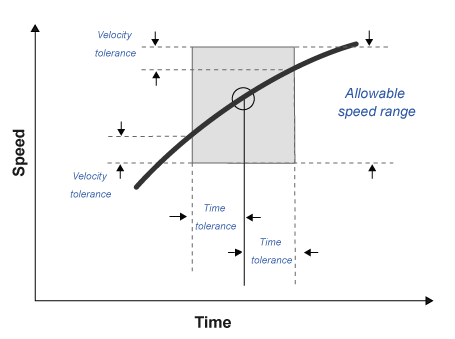
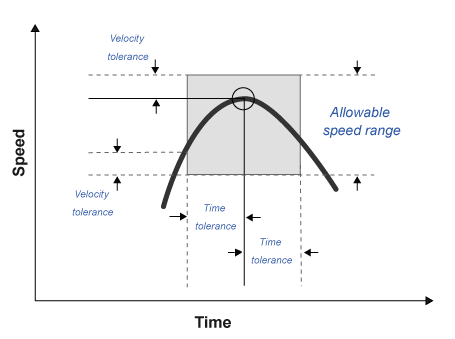
Идентифицируйте отказы цикла привода в пределах допусков, заданных стандартизированными тестами. | На вкладке Fault Tracking используйте параметры, чтобы задать допуски. Если скорость транспортного средства не находится в допустимой области значений скоростей, блок устанавливает условие отказа. |
На вкладке Fault Tracking используйте параметры, чтобы задать допуски. Если скорость или время транспортного средства не находятся в допустимой области значений, блок устанавливает условие отказа.
| Параметр | Описание | Настройка | |
|---|---|---|---|
Стандарт EPA1 | Тесты WLTP2 | ||
Speed tolerance | Допуск скорости выше наивысшей точки и ниже самой нижней точки трассировки скорости цикла привода в пределах временного допуска. | 2.0 mph | 2.0 км/ч |
Time tolerance | Время, которое блок использует для определения допуска скорости. | 1,0 с | 1,0 с |
| Maximum number of faults | Максимальное количество отказов во время цикла привода. | Не задан | 10 |
| Maximum single fault time | Максимальная длительность отказа. | 2.0 с | 1,0 с |
| Maximum total fault time | Максимальное время нахождения в условии отказа. | Не задан | Не задан |
Эти рисунки иллюстрируют, как блок использует скорость и допуски времени для определения допустимой области значений скорости.
|
|
|
Если вы задаете Drive cycle source Workspace variableможно задать переменную рабочей области, которая задает цикл дисковода.
В этой таблице приведены примеры использования переменных рабочей области для создания собственных циклов дисков.
| Переменная рабочей области | Скорость источника Модуля | Выход скорости Модуля | График цикла привода |
|---|---|---|---|
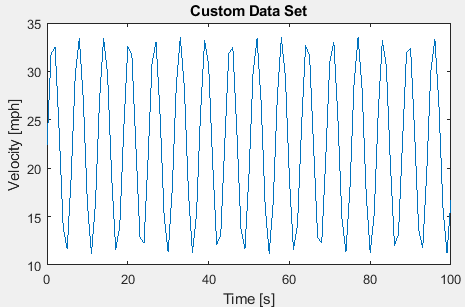
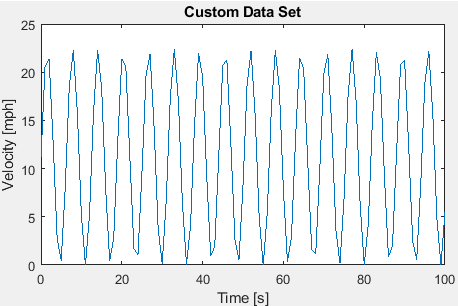
Конструкция без графика сдвига передач. From workspace установлено на t = 0:1:100; xdot = 5.*sin(t)+10; myCycleS.time = t'; myCycleS.signals.values = xdot'; | m/s | mph |
|
Структура с графиком сдвига передач. From workspace установлено на gears=[0, 1, 2, 3, 3, 4, 4, 4, 4, 4, 4]; t=0:1:10; xdot=[0,5,10,15,20,25,30,30,30,30,30]; myCycleS.time=t'; myCycleS.signals.values=[xdot',gears']; | m/s | mph |
|
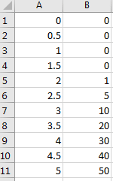
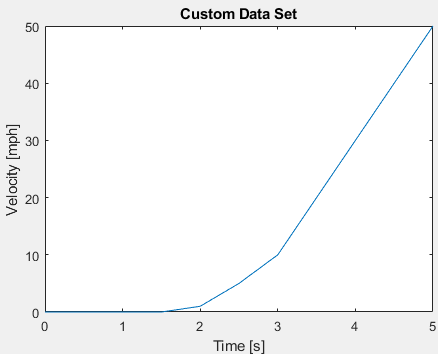
2-D массив без графика сдвига передач. From workspace установлено на t = 0:1:100; xdot = 5.*sin(t)+5; myCycleA = [t',xdot']; | m/s | mph |
|
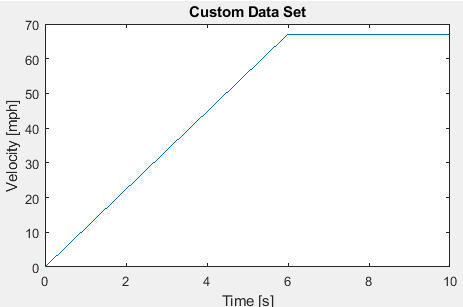
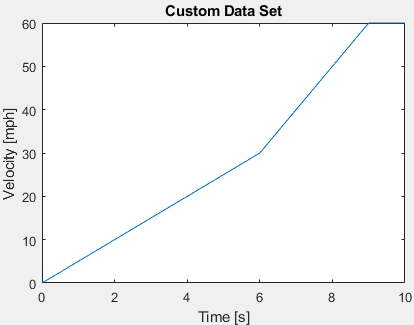
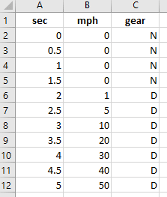
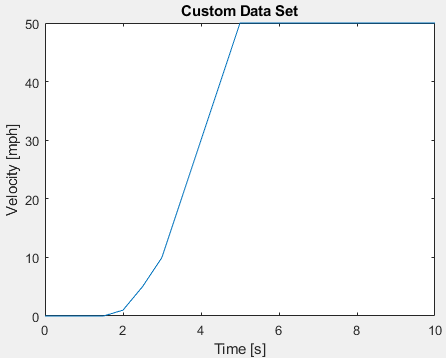
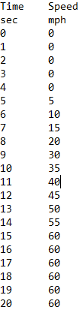
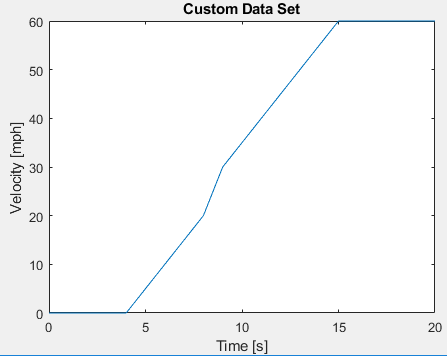
2-D массив с графиком сдвига передач. From workspace установлено на gears=[0, 1, 2, 3, 4, 4, 4, 5, 5, 5, 5]; t=0:1:10; xdot=[0,5,10,15,20,25,30,40,50,60,60]; myCycleA=[t',xdot',gears']; | mph | mph |
|
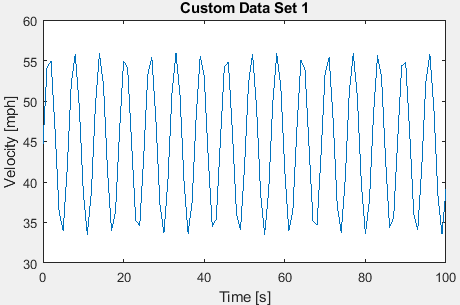
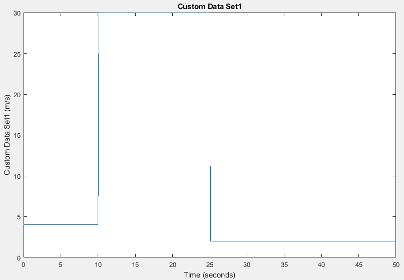
Временные ряды объект без графика сдвига передач. From workspace установлено на myCycleT = timeseries; t = 0:1:100; xdot = 5.*sin(t)+20; myCycleT.Data = xdot'; myCycleT.Time = t; | m/s | mph |
|
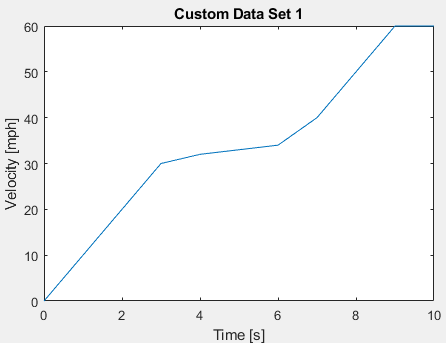
Временные ряды объект без графика сдвига передач. From workspace установлено на myCycleT = timeseries; gears=[0, 1, 2, 3, 4, 4, 4, 5, 5, 5, 5]; t=0:1:10; xdot=[0,10,20,30,32,33,34,40,50,60,60]; myCycleT.Data = [xdot',gears']; myCycleT.Time = t'; | mph | mph |
|
Drive cycle source - Выберите источник цикла приводаFTP75 (по умолчанию) | Wide Open Throttle (WOT) | Workspace variable | .mat, .xls, .xlsx or .txt fileFTP75 - Загрузите FTP75 цикл привода от a. mat файл в 1-D Lookup Table блок. Этот FTP75 представляет собой цикл движения по городу, который можно использовать для определения выбросов выхлопных труб и экономии топлива легковых автомобилей. Для установки дополнительных циклов дисков из пакета поддержки смотрите Install Drive Cycle Data.
Wide Open Throttle (WOT) - Используйте параметры WOT, чтобы задать цикл дисков для проверки эффективности.
Workspace variable - Задайте время, скорость и, опционально, данные передачи как структуру, 2-D массив или объект временных рядов.
.mat, .xls, .xlsx or .txt file - Укажите файл, который содержит данные о времени, скорости и, опционально, о передаче в формате столбца.
После установки дополнительных циклов можно использовать set_param для установки цикла привода. Для примера использования циклов дисков US06:
set_param([gcs '/Drive Cycle Source'],'cycleVar','US06')
Таблица суммирует зависимости параметров.
| Источник цикла диска | Включает параметр |
|---|---|
Wide Open Throttle (WOT) | Start time, t_wot1 |
Initial reference speed, xdot_woto | |
Nominal reference speed, xdot_wot1 | |
Time to start deceleration, wot2 | |
Final reference speed, xdot_wot2 | |
WOT simulation time, t_wotend | |
Source velocity units | |
Workspace variable | From workspace |
Source velocity units | |
Output gear shift data, если цикл привода включает график сдвига передач | |
| Drive cycle source file |
| Source velocity units | |
Output gear shift data, если цикл привода включает график сдвига передач |
From workspace - Рабочая областьvariableМонотонное увеличение времени, скорости и, опционально, данных о передаче, заданных структурой, 2-D массивом или объектом временных рядов. Введите модули скорости в поле параметра Source velocity units.
Допустимая точка должна существовать для каждого соответствующего временного значения. Вы не можете задать inf, empty, или NaN.
В этой таблице приведены примеры использования переменных рабочей области для создания собственных циклов дисков.
| Переменная рабочей области | Скорость источника Модуля | Выход скорости Модуля | График цикла привода |
|---|---|---|---|
Конструкция без графика сдвига передач. From workspace установлено на t = 0:1:100; xdot = 5.*sin(t)+10; myCycleS.time = t'; myCycleS.signals.values = xdot'; | m/s | mph |
|
Структура с графиком сдвига передач. From workspace установлено на gears=[0, 1, 2, 3, 3, 4, 4, 4, 4, 4, 4]; t=0:1:10; xdot=[0,5,10,15,20,25,30,30,30,30,30]; myCycleS.time=t'; myCycleS.signals.values=[xdot',gears']; | m/s | mph |
|
2-D массив без графика сдвига передач. From workspace установлено на t = 0:1:100; xdot = 5.*sin(t)+5; myCycleA = [t',xdot']; | m/s | mph |
|
2-D массив с графиком сдвига передач. From workspace установлено на gears=[0, 1, 2, 3, 4, 4, 4, 5, 5, 5, 5]; t=0:1:10; xdot=[0,5,10,15,20,25,30,40,50,60,60]; myCycleA=[t',xdot',gears']; | mph | mph |
|
Временные ряды объект без графика сдвига передач. From workspace установлено на myCycleT = timeseries; t = 0:1:100; xdot = 5.*sin(t)+20; myCycleT.Data = xdot'; myCycleT.Time = t; | m/s | mph |
|
Временные ряды объект без графика сдвига передач. From workspace установлено на myCycleT = timeseries; gears=[0, 1, 2, 3, 4, 4, 4, 5, 5, 5, 5]; t=0:1:10; xdot=[0,10,20,30,32,33,34,40,50,60,60]; myCycleT.Data = [xdot',gears']; myCycleT.Time = t'; | mph | mph |
|
Чтобы включить этот параметр, выберите Workspace variable от Drive cycle source.
Drive cycle source file - Имя файла.mat, .xls, .xlsx or .txtФайл, содержащий монотонно увеличивающееся время, скорость и, опционально, передачу в столбце или разделенном запятыми формате. Блок игнорирует модули в файле. Введите модули скорости в поле параметра Source velocity units.
| Файл | Скорость источника Модуля | Выход скорости Модуля | График цикла привода |
|---|---|---|---|
Ан.
| mph | mph |
|
Ан.
| mph | mph |
|
А.
| mph | mph |
|
Если вы предоставляете расписание передач с помощью P, R, N, D, L, OD, блок преобразует передачи в целые числа.
|
Механизм |
Целое число |
|---|---|
|
P |
|
|
R |
|
|
N |
|
|
L |
|
|
D |
|
|
ПЕРЕДОЗИРОВКА |
Следующее целое число после наивысшей заданной передачи. |
Например, блок преобразует расписание передач P P N L D 3 4 5 6 5 4 5 6 7 OD 7 на 80 80 0 1 2 3 4 5 6 5 4 5 6 7 8 7.
Чтобы включить этот параметр, выберите .mat, .xls, .xlsx or .txt file от Drive cycle source.
Repeat cyclically - Повторите цикл приводаoff (по умолчанию) | onПовторите цикл привода, если время запуска симуляции превышает длину цикла привода.
Output acceleration - Вывод ускоренияoff (по умолчанию)Чтобы вычислить ускорение, блок реализует дифференциацию Савицкого-Голея с помощью полинома второго порядка с трехвыборочным фильтром точек.
Чтобы создать выходной порт ускорения, выберите Output acceleration. Выбор Output acceleration включает параметр Output acceleration units.
Output gear shift data - Вывод передачиoff (по умолчанию) | on
Задайте цикл привода, который содержит график сдвига передач. Вы можете использовать:
Пакет поддержки для установки стандартных циклов привода, которые включают графики сдвига передач, например JC08 и CUEDC.
Переменные рабочей области.
. mat. xls. xlsx, или txt файлы.
При нажатии на этот параметр создается Gear входного порта.
Start time, t_wot1 - Время запуска цикла привода5 (по умолчанию) | scalarВремя запуска цикла привода в с. Для примера этот график показывает цикл привода со временем запуска 10 с.
Чтобы включить этот параметр, выберите параметр Drive cycle source Wide Open Throttle (WOT).
Initial reference speed, xdot_woto - Скорость0 (по умолчанию) | scalarНачальная задающая скорость в модулях, которые вы задаете с Source velocity units параметром. Для примера этот график показывает цикл привода с начальной задающей скорости 4 м/с.
Чтобы включить этот параметр, выберите параметр Drive cycle source Wide Open Throttle (WOT).
Nominal reference speed, xdot_wot1 - Скорость30 (по умолчанию) | scalarНоминальная задающая скорость в модулях, которые вы задаете с Source velocity units параметром. Для примера на этом графике показан цикл привода с номинальной задающей скорости 30 м/с.
Чтобы включить этот параметр, выберите параметр Drive cycle source Wide Open Throttle (WOT).
Time to start deceleration, wot2 - Время20 (по умолчанию) | scalarВремя начала транспортного средства замедления в с. Для примера этот график показывает цикл привода с транспортным средством замедлением, начинающимся с 25 с.
Чтобы включить этот параметр, выберите параметр Drive cycle source Wide Open Throttle (WOT).
Final reference speed, xdot_wot2 - Скорость0 (по умолчанию) | scalarКонечная задающая скорость в модулях, которые вы задаете с Source velocity units параметром. Для примера этот график показывает цикл привода с конечной задающей скорости 2 м/с.
Чтобы включить этот параметр, выберите параметр Drive cycle source Wide Open Throttle (WOT).
WOT simulation time, t_wotend - Время30 (по умолчанию) | scalarВремя симуляции WOT цикла привода, в с. Например, этот график показывает цикл привода со временем симуляции 50 с.
Чтобы включить этот параметр, выберите параметр Drive cycle source Wide Open Throttle (WOT).
Source velocity units - Задайте модули измерения скоростиm/s (по умолчанию)Входные модули измерения скорости.
Чтобы включить этот параметр, выберите параметр Drive cycle source Wide Open Throttle (WOT), Workspace variable, или .mat, .xls, .xlsx or .txt file.
Output velocity units - Задайте модули измерения скоростиm/s (по умолчанию)Выходные модули измерения скорости.
Output acceleration units - Задайте модули измерения ускоренияm/s^2 (по умолчанию)Задайте выход модулей ускорения.
Чтобы включить этот параметр, выберите Output acceleration.
Output sample period (0) for continuous - Частота дискретизации0 (по умолчанию) | scalarЧастота дискретизации. Установите значение 0 для непрерывного периода дискретизации. Для дискретного периода задайте ненулевую ставку.
Enable fault tracking - Включить отслеживание отказовoff (по умолчанию) | onВыберите этот параметр, чтобы включить отслеживание сбоев цикла привода. Используйте параметры, чтобы задать допуски. Если скорость транспортного средства не находится в допустимой области значений скоростей, блок устанавливает условие отказа.
Выбор этого параметра включает эти параметры:
Speed tolerance, velBnd
Speed tolerance units, velBndUnit
Velocity feedback units, inUnit
Time tolerance, timeBnd
Speed tolerance, velBnd - Допуск скорости цикла привода2.0 (по умолчанию) | scalarДопуск скорости выше наивысшей точки и ниже самой нижней точки трассировки скорости цикла привода в пределах допустимого времени. Если скорость транспортного средства не находится в допустимой области значений скоростей, блок устанавливает условие отказа. Для допусков, заданных стандартизированными тестами, используйте следующие настройки:
Графики движения динамометра EPA - 2.0
Тесты WLTP - 2.0
Эти рисунки иллюстрируют, как блок использует скорость и допуски времени для определения допустимой области значений скорости.
|
|
|
Чтобы включить этот параметр, на вкладке Fault Tracking, выберите Enable fault tracking.
Speed tolerance units, velBndUnit - Установите модулиmph (по умолчанию)Модули допуска скорости. Для модулей измерения, заданных стандартизированными тестами, используйте следующие модули:
Графики движения динамометра EPA - m/s
Тесты WLTP - km/h
Чтобы включить этот параметр, на вкладке Fault Tracking, выберите Enable fault tracking.
Velocity feedback units, inUnit - Установите модули скоростной обратной связиm/s (по умолчанию)Скорость обратную связь модулей. Установите значение в VelFdbk Вход сигнала порта модулей.
Чтобы включить этот параметр, на вкладке Fault Tracking, выберите Enable fault tracking.
Time tolerance, timeBnd - Допуск по времени1.0 (по умолчанию) | scalarВремя, которое блок использует для определения допуска скорости. Если скорость транспортного средства не находится в допустимой области значений скоростей, блок устанавливает условие отказа. Для допусков по времени, заданных стандартизированными тестами, используйте следующие настройки:
Графики движения динамометра EPA - 1.0
Тесты WLTP - 1.0
Эти рисунки иллюстрируют, как блок использует скорость и допуски времени для определения допустимой области значений скорости.
|
|
|
Чтобы включить этот параметр, на вкладке Fault Tracking, выберите Enable fault tracking.
Enable failure tracking - Включить отслеживание отказаoff (по умолчанию) | onВыберите этот параметр, чтобы включить отслеживание отказа цикла привода.
Чтобы включить этот параметр, выберите Enable fault tracking. Выбор Enable failure tracking параметра включает эти параметры:
Stop simulation when trace fails, stopSim
Maximum number of faults, maxFaultCnt
Maximum single fault time, maxFaultTime
Maximum total fault time, maxTotFaultTime
Maximum number of faults, maxFaultCnt - Максимальное количество отказов10 (по умолчанию) | scalarМаксимальное количество отказов во время цикла привода. Для номера, заданного стандартизированными тестами, используйте следующие настройки:
Графики движения динамометра EPA - Не указано
Тесты WLTP - 10
Если количество отказов превышает максимальное количество отказов, блок устанавливает отказ.
Чтобы включить этот параметр, на вкладке Fault Tracking, выберите Enable failure tracking.
Maximum single fault time, maxFaultTime - Максимальная длительность одиночного отказа2.0 (по умолчанию) | scalarМаксимальная длительность одиночного отказа, в с. Для времени, заданного стандартизированными тестами, используйте следующие настройки:
Графики движения динамометра EPA - 2.0
Тесты WLTP - 1.0
Если длительность отказа превышает максимальное время одиночного отказа, блок устанавливает отказ.
Чтобы включить этот параметр, на вкладке Fault Tracking, выберите Enable failure tracking.
Maximum total fault time, maxTotFaultTime - Максимальное общее время отказа15.0 (по умолчанию) | scalarМаксимальное время нахождения в условии отказа, в с.
Если накопленное время, проведенное в условии отказа, превышает максимальное общее время отказа, блок устанавливает отказ.
Чтобы включить этот параметр, на вкладке Fault Tracking, выберите Enable failure tracking.
Display simulation trace - Отобразите трассировку скоростиoff (по умолчанию) | onВыберите этот параметр, чтобы отобразить окно отслеживания скорости. Выбор этого параметра может замедлить время симуляции.
Выбор этого параметра включает эти параметры:
Simulation trace update rate, dtTrace
Simulation trace display window, traceWindow
Simulation trace update rate, dtTrace - частота обновления трассировки1 (по умолчанию) | scalarТрассировка частоты обновления симуляции, в с. Установите на 0 для непрерывного периода дискретизации. Для дискретного периода задайте ненулевую ставку.
Чтобы включить этот параметр, на вкладке Fault Tracking, выберите Display simulation trace.
Simulation trace display window, traceWindow - Скорость обновления окна трассировки10 (по умолчанию) | scalarПроследите частоту обновления окна симуляции, в с.
Чтобы включить этот параметр, на вкладке Fault Tracking, выберите Display simulation trace.
[1] Агентство по охране окружающей среды (EPA). График движения городского динамометра EPA. 40 CFR 86.115-78, 1 июля 2001 года.
[2] Комиссия Европейского союза. «Скорость трассировки допусков». Регламент Комиссии Европейского союза. 32017R1151, Sec 1.2.6.6, 1 июня 2017 года.