Выравнивание модулированных сигналов с помощью фильтрации обратной связи принятия решений
Коммуникационный тулбокс/эквалайзеры
Блок Эквалайзера Обратной Связи использует линию задержки отвода фильтра обратной связи принятия решения с взвешенной суммой, чтобы выровнять модулированные сигналы, переданные через дисперсионный канал. Используя оценку канала, смоделированного как фильтр с конечной входной характеристикой (конечной импульсной характеристикой), блок обрабатывает входные кадры и выводит оцененный сигнал.
Этот значок показывает блок со всеми портами, активированными для строений, которые используют адаптивный алгоритм LMS или RLS.
![]()
Этот значок показывает блок со всеми портами, активированными для строений, которые используют адаптивный алгоритм CMA.
![]()
Типы данных |
|
Многомерные сигналы |
|
Сигналы переменного размера |
|
Эквалайзер с обратной связью принятия решения (DFE) является нелинейным эквалайзером, который уменьшает межсимвольную интерференцию (ISI) в частотно-избирательных каналах. Если null существует в частотной характеристики канала, DFE не усиливают шум. DFE состоит из выделенной линии задержки, которая сохраняет выборки из входного сигнала и содержит фильтр прямой связи и фильтр обратной связи. Прямой фильтр аналогичен линейному эквалайзеру. Фильтр обратной связи содержит отведенную линию задержки, входы которой являются решениями, принятыми по уравненному сигналу. Один раз за период символа эквалайзер выводит взвешенную сумму значений в линии задержки и обновляет веса для подготовки к следующему периоду символа.
DFE могут быть разнесены по символам или разнесены по фракциям.
Для эквалайзера с разбиением на символы количество выборок на символ, K, равно 1. Скорость выхода выборки равна скорости входа выборки.
Для эквалайзера с дробным интервалом символов количество выборок на символ, K, является целым числом, большим 1. Обычно K равен 4 для уравнителей с интервалами между символами. Выходная частота дискретизации 1/ T, и входная частота дискретизации K/T. Обновление веса касания происходит со скоростью выхода.
Эта схема показывает разнесенный по долям DFE с общим количеством N весов, периодом T и K выборок на символ. Фильтр имеет L веса вперед и N - L веса обратной связи. Прямой фильтр находится в верхней части, а фильтр обратной связи - в нижней части. Если K равно 1, результатом является разнесенный по символам DFE вместо разнесенного по фракциям DFE с символами.
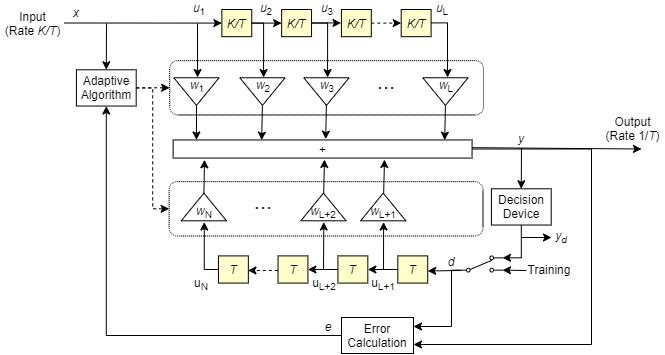
В каждом периоде символа эквалайзер принимает K входных выборок в прямом фильтре и одно решение или обучающую выборку в фильтре обратной связи. Затем эквалайзер выводит взвешенную сумму значений в линиях задержки прямой и обратной связи и обновляет веса для подготовки к следующему периоду символа.
Примечание
Алгоритм для блока Адаптивный Алгоритм в схеме совместно оптимизирует веса прямой и обратной связи. Оптимизация соединений особенно важна для сходимости в рекурсивном алгоритме наименьшего квадрата (RLS).
Для получения дополнительной информации см. «Эквализация».


