Правильный наклон синхроимпульса символа
Коммуникационный тулбокс/синхронизация
Блок Symbol Synchronizer корректирует наклон временных часов символа для схем модуляции PAM, PSK, QAM или OQPSK между передатчиком с одной несущей и приемником. Для получения дополнительной информации см. раздел «Обзор синхронизации символов».
Примечание
Входной сигнал действует на базисе скорости дискретизации, в то время как выходной сигнал действует на базисе скорости символа.
Типы данных |
|
Многомерные сигналы |
|
Сигналы переменного размера |
|
Алгоритм символьной синхронизации основан на цикле фазовой автоподстройки (ФАП), который состоит из четырех компонентов:
Детектор временных ошибок (TED)
Делающий интерполяции
Контроллер интерполяции
Фильтр цикла
Для модуляции OQPSK синфазные и квадратурные компоненты сигнала сначала выравниваются (как в модуляции QPSK) с использованием буфера состояний, чтобы кэшировать последнюю половину символа предыдущего входного сигнала. После начального выравнивания оставшийся процесс синхронизации аналогичен процессу модуляции QPSK.
Этот блок показывает пример синхронизатора синхронизации времени. На рисунке временная характеристика символа PLL работает с x (t), принятым сигналом дискретизации после согласованной фильтрации. PLL синхронизации символов выводит сигнал символа ,, после корректировки на синхроимпульс между передатчиком и приемником.
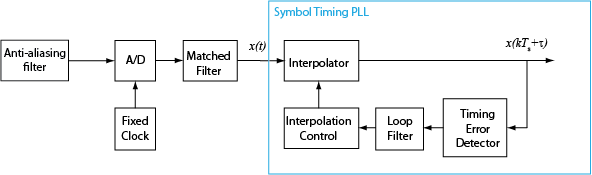
Временная задержка оценивается из выборок с фиксированной скоростью согласованного фильтра, которые асинхронны со скоростью символа. Поскольку получившиеся выборки не выровнены по контурам символов, интерполятор используется, чтобы «переместить» выборки. Поскольку задержка неизвестна, интерполятор должен быть адаптивным. Кроме того, поскольку интерполяция является линейной комбинацией доступных выборок, ее можно рассматривать как выход фильтра.
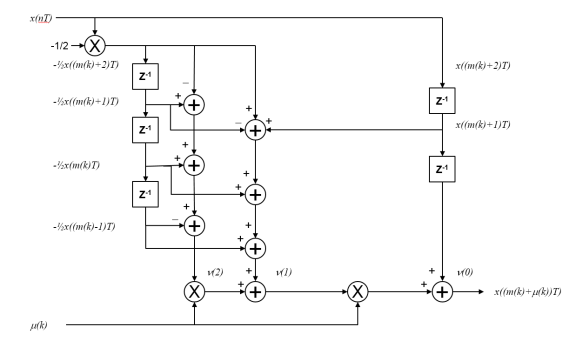
Интерполятор использует кусочно-параболический интерполятор с структурой Фэрроу и α коэффициента, установленными на 1/2 (см. Райс, Майкл, Цифровые коммуникации: Подход в дискретном времени).
Управление интерполяцией предоставляет интерполятору индекс базовой точки и дробный интервал. Индекс базовой точки является индексом выборки, ближайшим к интерполяции. Дробный интервал является отношением времени между интерполяцией и ее индексом базовой точки и интерполяционным интервалом.
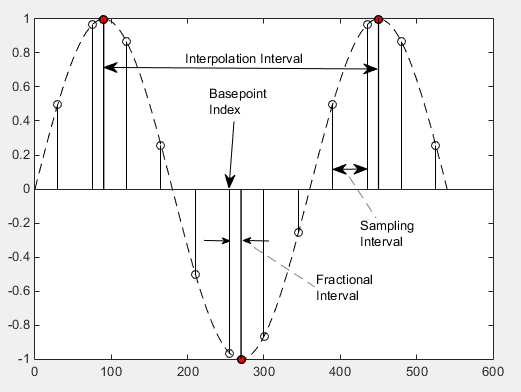
Интерполяция выполняется для каждой выборки, и сигнал строба используется, чтобы определить, выводится ли интерполянт. Синхронизатор использует управление интерполяцией счетчика по модулю 1, чтобы предоставить строб и дробный интервал для использования с интерполятором.
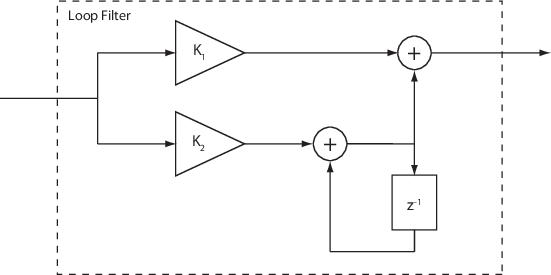
Синхронизатор использует пропорционально-интегрирующий петлевой фильтр (PI). Пропорциональные составляющие, K 1 и коэффициент усиления интегратора, K 2, вычисляются
и
Промежуточный срок, θ, дается
где:
N - количество выборок на символ.
ζ - коэффициент затухания.
Bn T s является нормированным циклом полосой пропускания.
K p - коэффициент усиления детектора.
[1] Райс, Майкл. Цифровые коммуникации: подход в дискретном времени. Верхняя Седл-Ривер, Нью-Джерси: Prentice Hall, 2008.
[2] Менгали, Умберто и Альдо Н. Д'Андреа. Методы синхронизации для цифровых приемников. Нью-Йорк: Пленум Пресс, 1997.


