Правильный наклон синхроимпульса символа
The comm.SymbolSynchronizer Система object™ корректирует наклон синхроимпульса символа между передатчиком с одной несущей и приемником для схем модуляции PAM, PSK, QAM и OQPSK. Для получения дополнительной информации см. раздел «Обзор синхронизации символов».
Примечание
Входной сигнал действует на базисе скорости дискретизации, и выходной сигнал действует на базисе скорости символа.
Для исправления наклона синхроимпульса символа синхронизации:
Создайте comm.SymbolSynchronizer Объекту и установите его свойства.
Вызывайте объект с аргументами, как будто это функция.
Дополнительные сведения о работе системных объектов см. в разделе «Что такое системные объекты?».
symbolSync = comm.SymbolSynchronizer
symbolSync = comm.SymbolSynchronizer(Name,Value)comm.SymbolSynchronizer('Modulation','OQPSK') конфигурирует системный объект символьной синхронизации для входного сигнала, модулированного OQPSK. Заключайте каждое имя свойства в кавычки.
Настраиваемые DampingFactor, NormalizedLoopBandwidth, и DetectorGain свойства позволяют вам оптимизировать эффективность синхронизатора в цикле симуляции, не освобождая объект.
Для версий ранее R2016b используйте step функция для запуска алгоритма системного объекта. Аргументы в step является созданным объектом, далее приводятся аргументы, показанные в этом разделе.
Для примера, y = step(obj,x) и y = obj(x) выполнять эквивалентные операции.
symbols = symbolSync(samples)
Вход действует на базисе частоты дискретизации, а выходной сигнал действует на базисе скорости символа.
Можно настроить DampingFactor, NormalizedLoopBandwidth, и DetectorGain свойства для повышения эффективности синхронизатора.
Чтобы использовать функцию объекта, задайте системный объект в качестве первого входного параметра. Например, чтобы освободить системные ресурсы системного объекта с именем obj, используйте следующий синтаксис:
release(obj)
Исправьте фиксированную ошибку символа синхронизации на зашумленном сигнале QPSK. Проверьте вероятность битовой ошибки (BER) синхронизируемого принимаемого сигнала.
Инициализируйте параметры симуляции.
M = 4; % Modulation order for QPSK nSym = 5000; % Number of symbols in a packet sps = 4; % Samples per symbol timingErr = 2; % Samples of timing error snr = 15; % Signal-to-noise ratio (dB)
Создайте корневой приподнятый косинус (RRC), передает и принимает системные объекты фильтра.
txfilter = comm.RaisedCosineTransmitFilter( ... 'OutputSamplesPerSymbol',sps); rxfilter = comm.RaisedCosineReceiveFilter( ... 'InputSamplesPerSymbol',sps,'DecimationFactor',2);
Создайте символьный синхронизатор Системный объект, чтобы исправить ошибку синхронизации.
symbolSync = comm.SymbolSynchronizer;
Сгенерируйте случайные M-арные символы и примените QPSK модуляцию.
data = randi([0 M-1],nSym,1); modSig = pskmod(data,M,pi/4);
Создайте объект задержки, чтобы ввести фиксированную ошибку синхронизации из 2 выборок. Поскольку фильтр RRC передачи выводит 4 выборки на символ, 1 выборка эквивалентна символу 1/4 через фиксированную задержку и канал.
fixedDelay = dsp.Delay(timingErr);
fixedDelaySym = ceil(fixedDelay.Length/sps); % Round fixed delay to nearest integer in symbolsПропустите модулированный сигнал через передающий RRC фильтр при помощи txfilter объект. Примените ошибку синхронизации сигнала при помощи fixedDelay объект.
txSig = txfilter(modSig); delaySig = fixedDelay(txSig);
Пропустите задержанный сигнал через канал AWGN с отношением сигнал/шум 15 дБ.
rxSig = awgn(delaySig,snr,'measured');Пропустите модулированный сигнал через приемный RRC-фильтр при помощи rxfilter объект. Отобразите график поля точек. Из-за ошибки синхронизации принятый сигнал не совпадает с ожидаемым эталонным созвездием QPSK.
rxSample = rxfilter(rxSig); scatterplot(rxSample(1001:end),2)

Исправьте ошибку символа синхронизации при помощи symbolSync объект. Отобразите график поля точек. Синхронизированный сигнал теперь выравнивается с ожидаемым созвездием QPSK.
rxSync = symbolSync(rxSample); scatterplot(rxSync(1001:end),2)

Демодулируйте сигнал QPSK.
recData = pskdemod(rxSync,M,pi/4);
Вычислите в символах общую системную задержку из-за фиксированной задержки и фильтров RRC передачи и приема.
sysDelay = dsp.Delay(fixedDelaySym + txfilter.FilterSpanInSymbols/2 + ...
rxfilter.FilterSpanInSymbols/2);Вычислите BER с учетом задержки системы.
[numErr,ber] = biterr(sysDelay(data),recData)
numErr = 12
ber = 0.0012
Исправьте фиксированную ошибку символа синхронизации на шумном сигнале передачи BPSK. Проверьте вероятность битовой ошибки (BER) синхронизируемого принимаемого сигнала.
Инициализируйте параметры симуляции.
M = 2; % Modulation order for BPSK nSym = 20000; % Number of symbols in a packet sps = 4; % Samples per symbol timingErr = 2; % Samples of timing error snr = 15; % Signal-to-noise ratio (dB)
Создайте корневой приподнятый косинус (RRC), передает и принимает системные объекты фильтра.
txfilter = comm.RaisedCosineTransmitFilter(... 'OutputSamplesPerSymbol',sps); rxfilter = comm.RaisedCosineReceiveFilter(... 'InputSamplesPerSymbol',sps,'DecimationFactor',1);
Создайте символьный синхронизатор System object™, чтобы исправить ошибку синхронизации.
symbolSync = comm.SymbolSynchronizer(... 'SamplesPerSymbol',sps, ... 'NormalizedLoopBandwidth',0.01, ... 'DampingFactor',1.0, ... 'TimingErrorDetector','Early-Late (non-data-aided)');
Сгенерируйте символы случайных данных и примените BPSK модуляцию.
data = randi([0 M-1],nSym,1); modSig = pskmod(data,M);
Создайте объект задержки, чтобы ввести фиксированную ошибку синхронизации из 2 выборок. Поскольку фильтр RRC передачи выводит 4 выборки на символ, 1 выборка эквивалентна символу 1/4 через фиксированную задержку и канал.
fixedDelay = dsp.Delay(timingErr);
fixedDelaySym = ceil(fixedDelay.Length/sps); % Round fixed delay to nearest integer in symbolsПропустите модулированный сигнал через передающий RRC фильтр при помощи txfilter объект. Примените ошибку синхронизации сигнала при помощи fixedDelay объект.
txSig = txfilter(modSig); delayedSig = fixedDelay(txSig);
Пропустите задержанный сигнал через канал AWGN.
rxSig = awgn(delayedSig,snr,'measured');Пропустите модулированный сигнал через приемный RRC-фильтр при помощи rxfilter объект. Отобразите график поля точек. Из-за ошибки синхронизации принятый сигнал не совпадает с ожидаемым опорным созвездием BPSK.
rxSample = rxfilter(rxSig); scatterplot(rxSample(10000:end),2)

Исправьте ошибку символа синхронизации при помощи symbolSync объект. Отобразите график поля точек. Синхронизированный сигнал теперь выравнивается с ожидаемым созвездием BPSK.
rxSync = symbolSync(rxSample); scatterplot(rxSync(10000:end),2)

Демодулируйте сигнал BPSK.
recData = pskdemod(rxSync,M);
Вычислите в символах общую системную задержку из-за фиксированной задержки и фильтров RRC передачи и приема.
sysDelay = dsp.Delay(fixedDelaySym + txfilter.FilterSpanInSymbols/2 + ...
rxfilter.FilterSpanInSymbols/2);Вычислите BER с учетом задержки системы.
[numErr1,ber1] = biterr(sysDelay(data),recData)
numErr1 = 8
ber1 = 4.0000e-04
Исправьте символы времени и ошибки смещения частоты при помощи comm.SymbolSynchronizer и comm.CarrierSynchronizer Системные объекты.
Строение
Инициализируйте параметры симуляции.
M = 16; % Modulation order nSym = 2000; % Number of symbols in a packet sps = 2; % Samples per symbol spsFilt = 8; % Samples per symbol for filters and channel spsSync = 2; % Samples per symbol for synchronizers lenFilt = 10; % RRC filter length
Создайте соответствующую пару корневых приподнятых Системных объектов фильтра косинуса (RRC) для передатчика и приемника.
txfilter = comm.RaisedCosineTransmitFilter('FilterSpanInSymbols',lenFilt, ... 'OutputSamplesPerSymbol',spsFilt,'Gain',sqrt(spsFilt)); rxfilter = comm.RaisedCosineReceiveFilter('FilterSpanInSymbols',lenFilt, ... 'InputSamplesPerSymbol',spsFilt,'DecimationFactor',spsFilt/2,'Gain',sqrt(1/spsFilt));
Создайте системный объект со смещением частоты фазы, чтобы ввести доплеровский сдвиг на 100 Гц.
doppler = comm.PhaseFrequencyOffset('FrequencyOffset',100, ... 'PhaseOffset',45,'SampleRate',1e6);
Создайте Системный объект переменной задержки, чтобы ввести смещения времени.
varDelay = dsp.VariableFractionalDelay;
Создайте несущую и символьный синхронизатор Системные объекты, чтобы исправить доплеровский сдвиг и смещение по времени, соответственно.
carrierSync = comm.CarrierSynchronizer('SamplesPerSymbol',spsSync); symbolSync = comm.SymbolSynchronizer( ... 'TimingErrorDetector','Early-Late (non-data-aided)', ... 'SamplesPerSymbol',spsSync);
Создайте сигнальное созвездие Системные объекты, чтобы просмотреть результаты.
refConst = qammod(0:M-1,M,'UnitAveragePower',true); cdReceive = comm.ConstellationDiagram('ReferenceConstellation',refConst, ... 'SamplesPerSymbol',spsFilt,'Title','Received Signal'); cdDoppler = comm.ConstellationDiagram('ReferenceConstellation',refConst, ... 'SamplesPerSymbol',spsSync,'Title','Frequency Corrected Signal'); cdTiming = comm.ConstellationDiagram('ReferenceConstellation',refConst, ... 'SamplesPerSymbol',spsSync,'Title','Frequency and Timing Synchronized Signal');
Основной цикл обработки
Основной цикл обработки:
Генерирует случайные символы и применяет QAM модуляцию.
Фильтрует модулированный сигнал.
Применяет смещения частоты и времени.
Передает переданный сигнал через канал AWGN.
Фильтрует принятый сигнал.
Исправляет доплеровский сдвиг.
Исправляет смещение синхронизации.
for k = 1:15 data = randi([0 M-1],nSym,1); modSig = qammod(data,M,'UnitAveragePower',true); txSig = txfilter(modSig); txDoppler = doppler(txSig); txDelay = varDelay(txDoppler,k/15); rxSig = awgn(txDelay,25); rxFiltSig = rxfilter(rxSig); rxCorr = carrierSync(rxFiltSig); rxData = symbolSync(rxCorr); end
Визуализация
Постройте график сигнальных созвездий принимаемого сигнала, сигнала с поправкой на частоту и синхронизируемого сигнала частоты и синхронизации. Конкретные точки созвездия не могут быть идентифицированы в принятом сигнале и могут быть только частично идентифицированы в сигнале с коррекцией частоты. Однако синхронизируемый по времени и частоте сигнал выравнивается с ожидаемыми точками созвездия QAM.
cdReceive(rxSig)

cdDoppler(rxCorr)

cdTiming(rxData)

Исправьте монотонно увеличивающуюся ошибку символа синхронизации на сигнале шумного 8-PSK. Отображение нормированной ошибки синхронизации.
Инициализируйте параметры симуляции.
M = 8; % Modulation order nSym = 5000; % Number of symbol in a packet sps = 2; % Samples per symbol nSamp = sps*nSym; % Number of samples in a packet
Создайте корневой приподнятый косинус (RRC), передает и принимает системные объекты фильтра.
txfilter = comm.RaisedCosineTransmitFilter( ... 'OutputSamplesPerSymbol',sps); rxfilter = comm.RaisedCosineReceiveFilter( ... 'InputSamplesPerSymbol',sps, ... 'DecimationFactor',1);
Создайте переменную дробную задержку System object™, чтобы ввести монотонно увеличивающуюся ошибку синхронизации.
varDelay = dsp.VariableFractionalDelay;
Создайте символьный синхронизатор Системный объект, чтобы исправить ошибку синхронизации.
symbolSync = comm.SymbolSynchronizer(... 'TimingErrorDetector','Mueller-Muller (decision-directed)', ... 'SamplesPerSymbol',sps);
Сгенерируйте случайные 8-арные символы и примените 8-PSK модуляцию.
data = randi([0 M-1],nSym,1); modSig = pskmod(data,M,pi/8);
Пропустите модулированный сигнал через фильтр передачи приподнятого косинуса и примените монотонно увеличивающуюся задержку синхронизации.
vdelay = (0:1/nSamp:1-1/nSamp)'; txSig = txfilter(modSig); delaySig = varDelay(txSig,vdelay);
Пропустите задержанный сигнал через канал AWGN с отношением сигнал/шум 15 дБ.
rxSig = awgn(delaySig,15,'measured');Пропустите модулированный сигнал через приемный RRC-фильтр. Отобразите график поля точек. Из-за ошибки синхронизации принятый сигнал не совпадает с ожидаемым 8-PSK эталонным созвездием.
rxSample = rxfilter(rxSig); scatterplot(rxSample,sps)

Исправьте ошибку символа синхронизации при помощи symbolSync объект. Отобразите график поля точек. Синхронизированный сигнал теперь выравнивается с ожидаемым 8-PSK созвездием.
[rxSym,tError] = symbolSync(rxSample); scatterplot(rxSym(1001:end))

Постройте график оценки ошибки синхронизации. Со временем нормированная ошибка синхронизации увеличивается до 1 выборки.
figure plot(vdelay,tError) xlabel('Time (s)') ylabel('Timing Error (samples)')

Алгоритм символьной синхронизации основан на цикле фазовой автоподстройки (ФАП), который состоит из четырех компонентов:
Детектор временных ошибок (TED)
Делающий интерполяции
Контроллер интерполяции
Фильтр цикла
Для модуляции OQPSK синфазные и квадратурные компоненты сигнала сначала выравниваются (как в модуляции QPSK) с использованием буфера состояний, чтобы кэшировать последнюю половину символа предыдущего входного сигнала. После начального выравнивания оставшийся процесс синхронизации аналогичен процессу модуляции QPSK.
Этот блок показывает пример синхронизатора синхронизации времени. На рисунке временная характеристика символа PLL работает с x (t), принятым сигналом дискретизации после согласованной фильтрации. PLL синхронизации символов выводит сигнал символа ,, после корректировки на синхроимпульс между передатчиком и приемником.
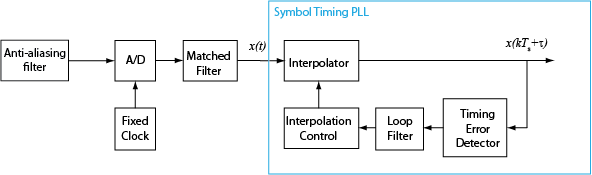
Временная задержка оценивается из выборок с фиксированной скоростью согласованного фильтра, которые асинхронны со скоростью символа. Поскольку получившиеся выборки не выровнены по контурам символов, интерполятор используется, чтобы «переместить» выборки. Поскольку задержка неизвестна, интерполятор должен быть адаптивным. Кроме того, поскольку интерполяция является линейной комбинацией доступных выборок, ее можно рассматривать как выход фильтра.
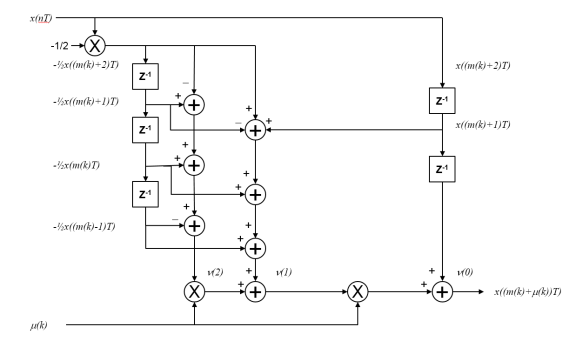
Интерполятор использует кусочно-параболический интерполятор с структурой Фэрроу и α коэффициента, установленными на 1/2 (см. Райс, Майкл, Цифровые коммуникации: Подход в дискретном времени).
Управление интерполяцией предоставляет интерполятору индекс базовой точки и дробный интервал. Индекс базовой точки является индексом выборки, ближайшим к интерполяции. Дробный интервал является отношением времени между интерполяцией и ее индексом базовой точки и интерполяционным интервалом.
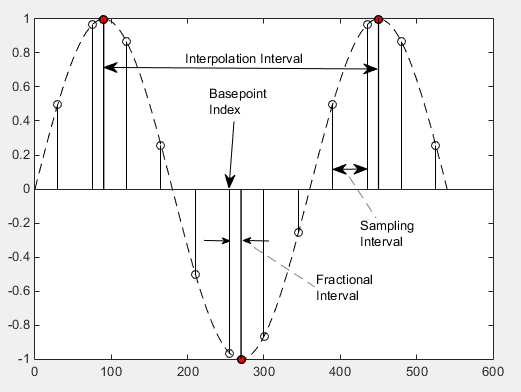
Интерполяция выполняется для каждой выборки, и сигнал строба используется, чтобы определить, выводится ли интерполянт. Синхронизатор использует управление интерполяцией счетчика по модулю 1, чтобы предоставить строб и дробный интервал для использования с интерполятором.
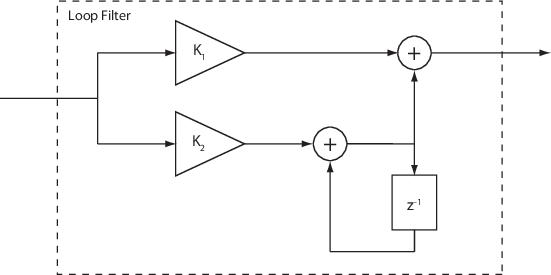
Синхронизатор использует пропорционально-интегрирующий петлевой фильтр (PI). Пропорциональные составляющие, K 1 и коэффициент усиления интегратора, K 2, вычисляются
и
Промежуточный срок, θ, дается
где:
N - количество выборок на символ.
ζ - коэффициент затухания.
Bn T s является нормированным циклом полосой пропускания.
K p - коэффициент усиления детектора.
[1] Райс, Майкл. Цифровые коммуникации: подход в дискретном времени. Верхняя Седл-Ривер, Нью-Джерси: Prentice Hall, 2008.
[2] Менгали, Умберто и Альдо Н. Д'Андреа. Методы синхронизации для цифровых приемников. Нью-Йорк: Пленум Пресс, 1997.
