Во многих ситуациях динамическое представление системы, которой вы хотите управлять, недоступно. Одним из решений этой задачи является получение динамической модели с помощью методов идентификации. Система возбуждается измеряемым сигналом, и соответствующий ответ системы собирается с некоторой частотой дискретизации. Получившиеся данные ввода-вывода затем используются, чтобы получить модель системы, такую как передаточная функция или модель пространства состояний. Этот процесс называется system identification или estimation. Цель системы идентификации состоит в том, чтобы выбрать модель, которая приводит к наилучшей возможной подгонке между измеренным откликом системы к конкретному входу и ответом модели на тот же вход.
Если у вас есть Simulink® модель вашей системы управления, вы можете моделировать входные/выходные данные вместо того, чтобы измерять их. Процесс оценки тот же. Моделируется системная реакция на некоторое известное возбуждение, и динамическая модель оценивается на основе полученных моделируемых входных/выходных данных.
Независимо от того, используете ли вы измеренные или моделируемые данные для оценки, как только идентифицируется подходящая модель объекта управления, вы навязываете объекту цели управления на основе ваших знаний о желаемом поведении системы, которое представляет модель объекта. Затем вы проектируете контроллер обратной связи, чтобы соответствовать этим целям.
Если у вас есть программное обеспечение System Identification Toolbox™, можно использовать PID Tuner как для идентификации объекта, так и для проектирования контроллера в одном интерфейсе. Можно импортировать входные/выходные данные и использовать их для идентификации одной или нескольких моделей объекта управления. Или можно получить моделируемые входные/выходные данные из модели Simulink и использовать их, чтобы идентифицировать одну или несколько модели объекта управления. Затем можно спроектировать и проверить ПИД-регуляторы с помощью этих объектов. PID Tuner также позволяет вам непосредственно импортировать модели объекта управления, такие как та, которую вы получили из независимой задачи идентификации.
Обзор системы идентификации см. в разделе О Системе идентификации (System Identification Toolbox).
Динамическое поведение многих систем может быть адекватно описано линейной зависимостью между входом и выходом системы. Даже когда поведение становится нелинейным в некоторых рабочих режимах, часто существуют режимы, в которых динамика системы является линейной. Например, поведение операционного усилителя или динамика лифта и силы аэродинамических тел может быть описано линейными моделями в пределах определенной ограниченной рабочей области значений входов. Для такой системы можно выполнить эксперимент (или симуляцию), которая возбуждает систему только в ее линейной области значений поведения и собирает входные/выходные данные. Затем можно использовать данные для оценки линейной модели объекта управления и разработать ПИД-регулятор для линейной модели.
В других случаях эффекты нелинейности малы. В таком случае линейная модель может обеспечить хорошее приближение, так что нелинейные отклонения рассматриваются как нарушения порядка. Такие приближения в большой степени зависят от профиля входа, амплитуды и содержимого частоты сигнала возбуждения.
Линейные модели часто описывают отклонение отклика системы от некоторой точки равновесия, из-за небольших возмущающих входов. Рассмотрим нелинейную систему, выход которой y (t) следует предписанной траектории в ответ на известный вход u (t). Динамика описывается как dx (t )/ dt = f (x, u), y = g (x, u). Здесь x является вектором внутренних состояний системы, а y - вектором выхода переменных. Функции f и g, которые могут быть нелинейными, являются математическими описаниями системы и динамикой измерений. Предположим, что, когда система находится в равновесном условии, небольшое возмущение входа, Δu, приводит к небольшому возмущению выхода, Δy:
Для примера рассмотрим систему следующих Диаграмм Simulink:
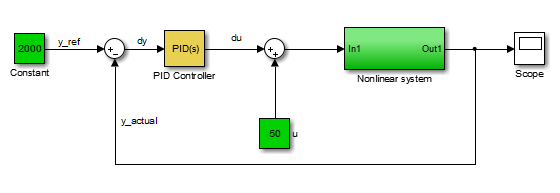
При работе в окружении без возмущений номинальный вход значения 50 удерживает объект вдоль его постоянной траектории значения 2000. Любые нарушения порядка приводят к отклонению объекта от этого значения. Задача ПИД-регулятора состоит в том, чтобы добавить небольшую коррекцию к входному сигналу, которая возвращает систему к ее номинальному значению за разумное количество времени. Таким образом, ПИД-регулятор должен работать только с динамикой линейного отклонения, хотя сам фактический объект может быть нелинейным. Таким образом, вы можете достичь эффективного управления нелинейной системой в некоторых режимах, разработав ПИД-регулятор для линейной аппроксимации системы при равновесных условиях.
Общим вариантом использования является разработка ПИД-регуляторов для устойчивой операции производственных объектов. В этих объектах часто требуется модель, связывающая эффект переменной измеряемого входа на выход величине в форме объекта SISO. Общая система может иметь характер MIMO, но эксперимент или симуляция проводятся таким образом, чтобы можно было измерить инкрементный эффект одной входной переменной на выбранном выходе. Данные могут быть довольно шумными, но поскольку ожидание состоит в том, чтобы контролировать только доминирующую динамику, модель объекта управления низкого порядка часто достаточно. Такой прокси получен путем сбора или симуляции входно-выходных данных и вывода из него модели процесса (передаточная функция низкого порядка с неизвестной задержкой). Сигнал возбуждения для вывода данных часто может быть простым отбойником в значении выбранной входной переменной.
В PID Tuner можно идентифицировать только один вход, один выход, непрерывное время моделей объекта управления. Кроме того, PID Tuner не можете выполнить следующие задачи системы идентификации:
Идентифицируйте передаточные функции произвольного числа полюсов и нулей. (PID Tuner можете идентифицировать передаточные функции до трех полюсов и одного нуля, плюс интегратор и временная задержка. PID Tuner можете идентифицировать модели пространства состояний произвольного порядка.)
Оцените компонент нарушения порядка модели, который может быть полезен для отделения измеренной динамики от динамики шума.
Проверьте оценку путем сравнения реакции объекта с независимым набором данных.
Выполните остаточный анализ.
Если вам нужны эти расширенные функции идентификации, импортируйте ваши данные в приложение System Identification (System Identification (System Identification Toolbox)). Используйте приложение System Identification, чтобы выполнить идентификацию модели и экспортировать идентифицированную модель в MATLAB® рабочей области. Затем импортируйте идентифицированную модель в PID Tuner для ПИД-регулятора проекта.
Для получения дополнительной информации о Системе идентификации Инструмента, смотрите Идентифицировать линейные модели Используя Системы идентификации Приложения (System Identification Toolbox).
Система идентификации (System Identification Toolbox)
