

В этом примере показано, как настроить Simulink® модель системы управления для достижения заданной полосы пропускания и заданных запасов устойчивости в Control System Tuner, не создавая явно цели настройки, которые захватывают эти требования. Можно использовать аналогичный подход для быстрой настройки циклов систем управления, смоделированных в MATLAB®.
Этот пример демонстрирует, как Quick Loop Tuning опция Control System Tuner генерирует цели настройки из спецификаций частоты среза и запаса по амплитуде и фазе. Эта опция позволяет быстро настроить циклы обратной связи SISO или MIMO для настройки с помощью подхода формирования контура. В примере также показано, как добавить дополнительные требования к настройке в систему управления после использования опции Quick Loop Tuning.
Quick Loop Tuning является Control System Tuner эквивалентным looptune команда.
Откройте модель Simulink.
open_system('rct_distillation')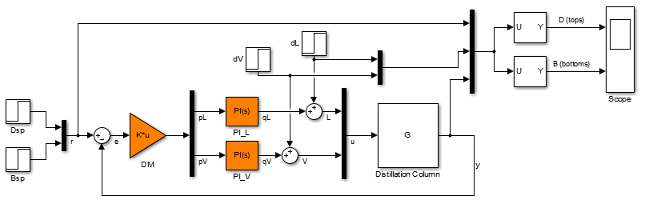
Эта модель представляет дистилляционный столбец, захваченную на объекте с двумя входами и двумя выходами G. Настраиваемые элементы являются матрицей усиления развязки DMи эти два ПИ-контроллеров, PI_L и PI_V. (Для получения дополнительной информации об этой модели см. «Контроллер развязки» для дистилляционного столбца.)
Предположим, ваша цель - настроить цикл обратной связи MIMO между r и y к полосе пропускания от 0,1 до 0,5 рад/с. Предположим, что вам также требуется запас по амплитуде 7 дБ и запас по фазе 45 степеней. Можно использовать опцию Quick Loop Tuning, чтобы быстро сконфигурировать Control System Tuner для этих целей.
Откройте Control System Tuner. В окне модели Simulink, в галерее Apps , нажмите Control System Tuner.
Определите блоки, которые вы хотите настроить. На Tuning вкладке Control System Tuner![]() нажмите Select Blocks. В диалоговом окне Select tuned blocks нажмите Add blocks. Затем выберите DM
нажмите Select Blocks. В диалоговом окне Select tuned blocks нажмите Add blocks. Затем выберите DM, PI_L, и PI_V для настройки. (Для получения дополнительной информации о выборе настроенных блоков смотрите Задать блоки для настройки в Control System Tuner.)
Теперь модель готова настраиваться на целевую полосу пропускания и запасы устойчивости.
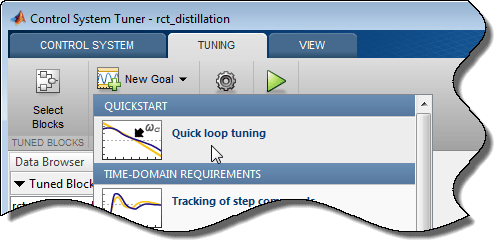
На вкладке Tuning выберите New Goal > Quick Loop Tuning.
Для быстрой настройки цикла необходимо идентифицировать сигналы привода и сигналы датчика, которые отделяют заводской фрагмент системы управления от контроллера, который для цели быстрой настройки цикла является остальной частью системы управления. Сигналы привода являются контроллер выходами, которые управляют объектом или входами объекта управления. Сигналы датчика являются измерениями выхода объекта управления, которые поступают обратно в контроллер. В этой системе управления сигналы привода представлены сигналом вектора uи сигналы датчика по вектору сигналу y.
В диалоговом окне Quick Loop Tuning, под Specify actuator signals (controls), добавьте сигнал привода, u. Точно так же, под Specify sensor signals (measurements), добавьте сигнал датчика, y (Для получения дополнительной информации об указании сигналов для настройки смотрите Задать цели для интерактивной настройки.)
В разделе Desired Goals в поле Target gain crossover region введите целевую область значений пропускной способности, [0.1 0.5]. Введите требуемый запас по амплитуде и запас по фазе в соответствующие поля.
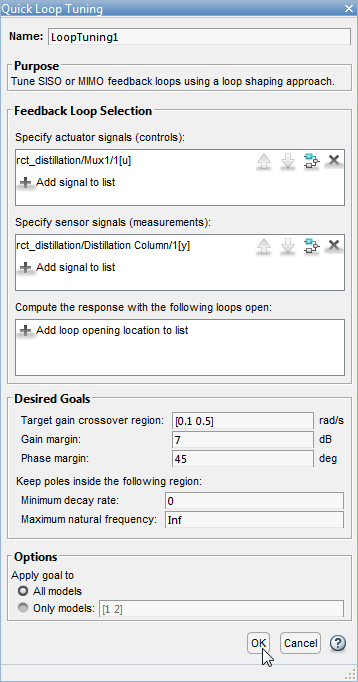
Нажмите OK. Control System Tuner автоматически генерирует цели настройки, которые захватывают желаемые цели, введенные вами в диалоговом окне.
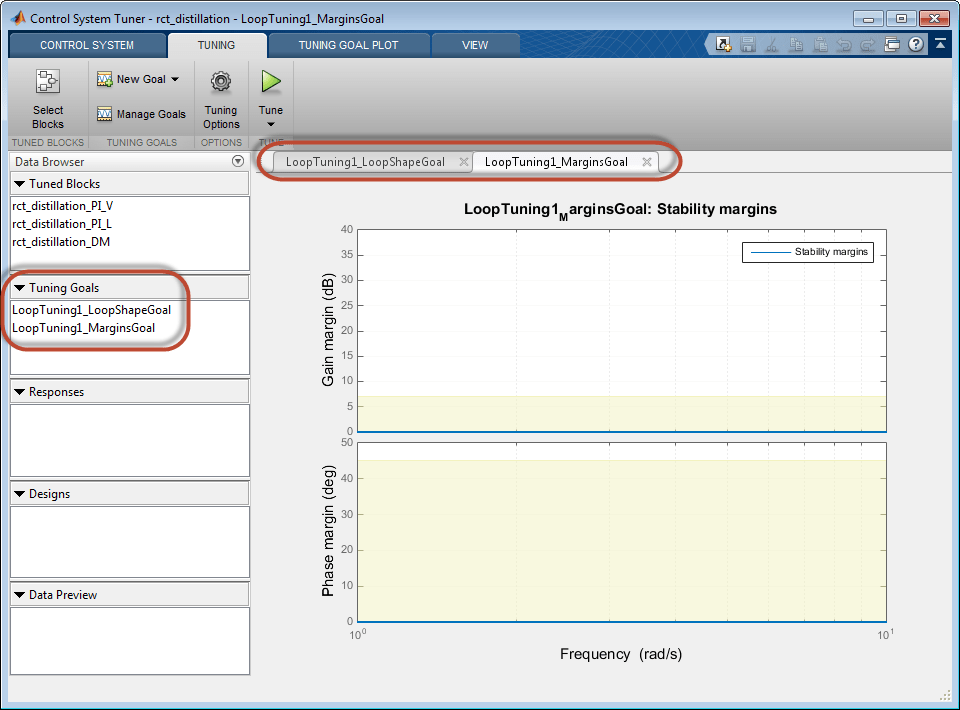
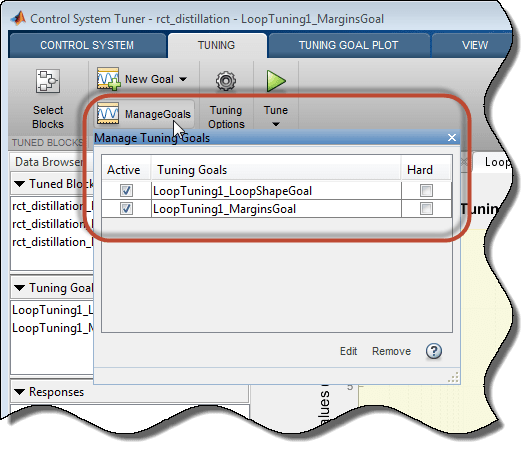
В этом примере Control System Tuner создает цель фигуры цикла и цель полей. Если бы вы изменили настройки местоположения полюса в диалоговом окне Quick Loop Tuning, была бы также создана цель полюсов.
Щелкните![]() Manage Goals, чтобы просмотреть автоматически созданные цели. По умолчанию цели активны и обозначаются как цели мягкой настройки.
Manage Goals, чтобы просмотреть автоматически созданные цели. По умолчанию цели активны и обозначаются как цели мягкой настройки.
Можно дважды кликнуть цели настройки, чтобы изучить их параметры, которые автоматически вычисляются и заполняются. Можно также изучить графические представления целей настройки. На вкладке Tuning исследуйте график LoopTuning1_LoopShapeGoal.
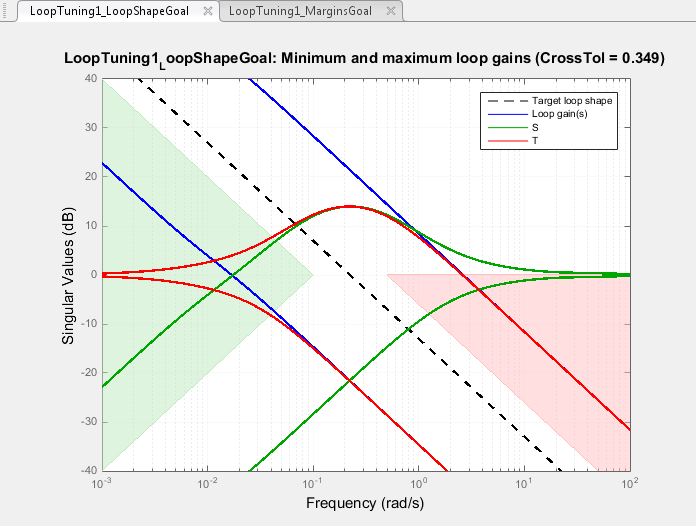
Целевая область значений пересечения выражается как цель Loop Shape с профилем усиления без разомкнутого контура интегратора. Затененные области графика показывают, что разрешённая область значений пересечения [0.1 0.5] рад/с, как вы задали в диалоговом окне Quick Loop Tuning.
Точно так же требования к марже отражены на LoopTuning1_MarginsGoal графике.
Щелкните![]() Tune, чтобы настроить модель, чтобы соответствовать автоматически созданным целям настройки. На графиках целей настройки видно, что требования удовлетворены.
Tune, чтобы настроить модель, чтобы соответствовать автоматически созданным целям настройки. На графиках целей настройки видно, что требования удовлетворены.
Чтобы создать дополнительные графики для исследования других откликов системы, смотрите Создание Графиков Отклика в Control System Tuner.
Если необходимо изменить требования проекта после использования Быстрой настройки цикла, можно отредактировать автоматически созданные цели настройки и снова настроить модель. Можно также создать дополнительные цели настройки.
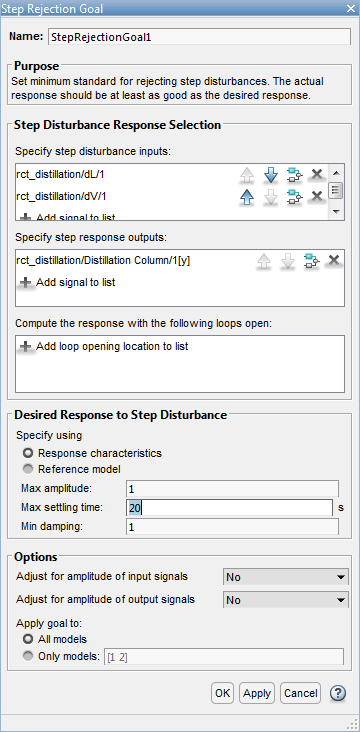
Например, добавьте требование, которое ограничивает реакцию на нарушение порядка, применяемое на входах объекта. Ограничьте ответ командой шага в dL и dV на выходах, yхорошо демпфировать, осесть менее чем за 20 секунд, а не превышать 4 по амплитуде. Выберите New Goal > Rejection of step disturbances и введите соответствующие значения в диалоговом окне Step Rejection Goal. (Для получения дополнительной информации о создании целей настройки смотрите Задать цели для интерактивной настройки.)
Теперь можно перенастроить модель, чтобы соответствовать всем этим целям настройки.
looptune (for slTuner) (Simulink Control Design)