Control System Tuner позволяет настроить систему управления, имеющую любую архитектуру. Control system architecture определяет, как ваши контроллеры взаимодействуют с управляющей системой. Архитектура включает настраиваемые элементы управления вашей системы, дополнительные компоненты фильтра и датчика, систему под управлением и взаимосвязи между всеми этими элементами. Для примера общая архитектура системы управления является одноконтурным строением обратной связи следующего рисунка:
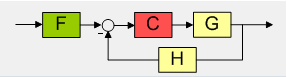
G - модель объекта управления, и H динамику датчика. Обычно это фиксированные компоненты системы управления. F предфильтра и C контроллера обратной связи являются настраиваемыми элементами. Поскольку системы управления так удобно выражены в этой форме блок-схемы, эти элементы называются фиксированными блоками и настраиваемыми блоками.
Control System Tuner дает вам несколько способов определить архитектуру системы управления:
Используйте предопределенную структуру обратной связи рисунка.
Моделируйте любую архитектуру системы управления в MATLAB® путем построения обобщенного пространства состояний (genss) модель из фиксированных компонентов LTI и настраиваемых блоков системы управления.
Моделируйте свою систему управления в Simulink® и укажите блоки для настройки в Control System Tuner (требуется программное обеспечение Simulink Control Design™).
Если ваша система управления имеет строение обратной связи, представленную на следующем рисунке, используйте предопределенную структуру обратной связи, встроенную в Control System Tuner.
Для примера предположим, что у вас есть двигатель постоянного тока, для которого вы хотите настроить ПИД-регулятор. Реакция двигателя моделируется как G (s) = 1/( s + 1)2. Создайте фиксированную модель LTI, представляющую объект, и настраиваемую модель ПИД-регулятора.
Gmot = zpk([],[-1,-1],1); Cmot = tunablePID('Cmot','PID');
Откройте Control System Tuner.
controlSystemTuner
Control System Tuner откроется, настройте эту архитектуру по умолчанию. Далее задайте значения блоков в архитектуре. Щелкните![]() , чтобы открыть диалоговое окно Standard feedback configuration.
, чтобы открыть диалоговое окно Standard feedback configuration.
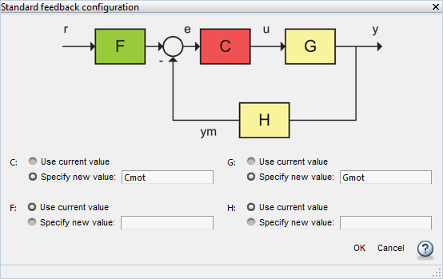
Введите значения для C и G, которые вы создали. Control System Tuner считывает эти значения из рабочего пространства MATLAB. Нажмите OK.
Значение по умолчанию для динамики датчика является фиксированной передаточной функцией единицы усиления. Значение по умолчанию для F фильтра является настраиваемым блоком усиления.
Теперь можно выбрать блоки для настройки, создать цели настройки и настроить систему управления.
Если ваша архитектура управления не совпадает с предопределенной архитектурой Control System Tuner, можно создать обобщенное пространство состояний (genss) модель с настраиваемыми компонентами, представляющими элементы вашего контроллера. Для примера предположим, что вы хотите настроить каскадную систему управления следующего рисунка, которая включает два настраиваемых ПИД-регуляторов.
.
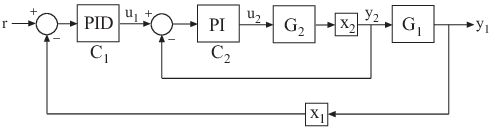
Создайте настраиваемые блоки системы управления для контроллеров и фиксированные модели LTI для компонентов объекта, G 1 и G 2. Также включите дополнительные положения открытия контура x 1 и x 2. Эти местоположения указывают, где можно открывать циклы или вводить сигналы с целью определения требований к настройке системы.
G2 = zpk([],-2,3); G1 = zpk([],[-1 -1 -1],10); C20 = tunablePID('C2','pi'); C10 = tunablePID('C1','pid'); X1 = AnalysisPoint('X1'); X2 = AnalysisPoint('X2');
Соедините эти компоненты, чтобы создать модель всей системы управления с обратной связью.
InnerLoop = feedback(X2*G2*C20,1); CL0 = feedback(G1*InnerLoop*C10,X1); CL0.InputName = 'r'; CL0.OutputName = 'y';
CL0 является настраиваемым genss модель. Определение имен для входа и выхода каналов позволяет вам идентифицировать их, когда вы задаете требования настройки для системы.
Откройте Control System Tuner, чтобы настроить эту модель.
controlSystemTuner(CL0)
Теперь можно выбрать блоки для настройки, создать цели настройки и настроить систему управления.
Если у вас есть программное обеспечение Simulink Control Design, можно смоделировать произвольную архитектуру системы управления в модели Simulink и настроить модель в Control System Tuner.
Смотрите Open Control System Tuner для настройки модели Simulink.
