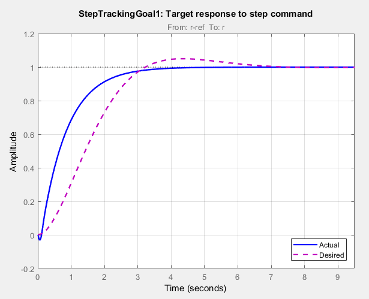
Сделайте переходную характеристику от заданных входов к заданным выходам тесно совпадающим с целевым ответом, при использовании Control System Tuner.
Цель отслеживания шага ограничивает переходную характеристику между указанными местоположениями сигнала, чтобы соответствовать переходной характеристике стабильной ссылки. Ограничение выполняется, когда относительное различие между настроенными и целевыми откликами попадает в заданный вами допуск. Вы можете использовать эту цель, чтобы ограничить SISO или MIMO ответ вашей системы управления.
Можно задать ссылку систему для целевой переходной характеристики с точки зрения характеристик системы первого порядка (константа времени) или характеристик системы второго порядка (естественная частота и процент перерегулирования). Кроме того, можно задать пользовательскую систему ссылок как числовую модель LTI.
На вкладке Tuning Control System Tuner выберите New Goal > Tracking of step commands, чтобы создать цель отслеживания шагов.
При настройке систем управления в командной строке используйте TuningGoal.StepTracking для задания переходной характеристики цели.
Используйте этот раздел диалогового окна, чтобы задать входы, вывода и открытия цикла для оценки цели настройки.
Specify step-response inputs
Выберите одно или несколько местоположений сигналов в модели, в которых можно применить шаг входа. Чтобы ограничить ответ SISO, выберите однозначный входной сигнал. Например, чтобы ограничить переходную характеристику из местоположения с именем 'u' в местоположение с именем 'y', нажмите![]() Add signal to list и выберите 'u'
Add signal to list и выберите 'u'. Чтобы ограничить ответ MIMO, выберите несколько сигналов или векторный сигнал.
Specify step-response outputs
Выберите в модели одно или несколько местоположений сигнала, в которых можно измерить ответ на вход шага. Чтобы ограничить ответ SISO, выберите однозначный выходной сигнал. Например, чтобы ограничить переходную характеристику из местоположения с именем 'u' в местоположение с именем 'y', нажмите![]() Add signal to list и выберите 'y'
Add signal to list и выберите 'y'. Чтобы ограничить ответ MIMO, выберите несколько сигналов или векторный сигнал. Для систем MIMO количество выходов должно равняться количеству входов.
Compute step response with the following loops open
Выберите в модели одно или несколько местоположений сигнала, в которых можно открыть цикл обратной связи для оценки этой цели настройки. Цель настройки оценивается относительно строения разомкнутого контура, созданной открытием циклов обратной связи в идентифицируемых вами местах. Например, чтобы вычислить цель настройки с открытием в местоположении с именем 'x', нажмите![]() Add signal to list и выберите 'x'
Add signal to list и выберите 'x'.
Совет
Чтобы выделить любой выбранный сигнал в Simulink® модель, click. ![]() Чтобы удалить сигнал из входного или выходного списка, нажмите.
Чтобы удалить сигнал из входного или выходного списка, нажмите. ![]() Когда вы выбрали несколько сигналов, можно переупорядочить их, используя
Когда вы выбрали несколько сигналов, можно переупорядочить их, используя![]() и.
и. ![]() Для получения дополнительной информации о том, как задать местоположения сигналов для цели настройки, смотрите Задать цели для интерактивной настройки.
Для получения дополнительной информации о том, как задать местоположения сигналов для цели настройки, смотрите Задать цели для интерактивной настройки.
Этот раздел диалогового окна используется для определения формы требуемой переходной характеристики.
First-order characteristics
Задайте требуемую переходную характеристику (образец модели Href) как ответ первого порядка с постоянными по времени τ:
Введите требуемое значение для τ в текстовое поле Time Constant. Задайте τ в единицах времени вашей модели.
Second-order characteristics
Задайте требуемую переходную характеристику как ответ второго порядка с постоянными по времени τ и собственной частотой 1/ τ .
Введите требуемое значение для τ в текстовое поле Time Constant. Задайте τ в единицах времени вашей модели.
Введите целевой процент перерегулирования в текстовое поле Overshoot.
Система ссылки второго порядка имеет форму:
Постоянная ζ демпфирования связана с процентом перерегулирования на ζ = cos(atan2(pi,-log(overshoot/100))).
Custom reference model
Задайте ссылку систему для нужной переходной характеристики как динамическая система модель, такую как tf, zpk, или ss модель.
Введите имя образца модели в MATLAB® рабочая область в LTI model to match текстовом поле. Кроме того, введите команду для создания подходящего образца модели, такой как tf(1,[1 1.414 1]).
Образец модели должна быть стабильной и должна иметь коэффициент усиления постоянного тока 1 (нулевая установившаяся ошибка). Модель может быть непрерывной или дискретной. Если модель дискретна, она может включать задержки, которые обрабатываются как полюсы в z = 0.
Образец модели может быть MIMO, при условии, что она квадратная и что ее сингулярное значение DC (sigma) равен 1. Затем количество входов и выходов образца модели должно совпадать с размерностями входов и выходов, заданных для цели переходной характеристики.
Для достижения наилучших результатов образца модели должны также включать внутренние характеристики системы, такие как неминамические нули фазы (подрезы).
Если выбранные вами входы и выходы определяют систему MIMO и вы применяете опорную систему SISO, программное обеспечение пытается соответствовать диагональным каналам системы MIMO. В этом случае поперечные связи, как правило, минимизируются.
Используйте этот раздел диалогового окна, чтобы задать дополнительные характеристики цели переходной характеристики.
Keep % mismatch below
Задайте относительную ошибку соответствия между фактической (настроенной) переходной характеристикой и целевой переходной характеристикой. Увеличьте это значение, чтобы ослабить соответствующий допуск. Относительная ошибка соответствия, erel, определяется как:
y (t) - yref (t) является несоответствием отклика, а 1 - yref (t) является ошибкой пошагового отслеживания целевой модели. обозначает энергию сигнала (2-норма).
Adjust for step amplitude
Для цели настройки MIMO, когда выбор модулей приводит к смешению малых и больших сигналов в разных каналах отклика, эта опция позволяет вам задать относительную амплитуду каждого входа в векторно значимом шаговом входе. Эта информация используется для масштабирования недиагональных членов в передаточной функции от ссылки до ошибки отслеживания. Это масштабирование гарантирует, что поперечные связи измеряются относительно амплитуды каждого опорного сигнала.
Например, предположим, что цель настройки состоит в том, чтобы вывести 'y1' and 'y2' отслеживать опорные сигналы 'r1'and 'r2'. Предположим далее, что вы требуете, чтобы выходы отслеживали ссылки с менее чем 10% перекрестной связи. Если r1 и r2 имеют сопоставимые амплитуды, тогда этого достаточно, чтобы сохранить усиления от r1 на y2 и r2 и y1 ниже 0,1. Однако, если r1 в 100 раз больше r2, коэффициент усиления от r1 на y2 должно быть меньше 0,001, чтобы убедиться, что r1 изменяет y2 менее чем на 10% r2 цель. Чтобы гарантировать этот результат, установите Adjust for step amplitude равным Yes. Затем введите [100,1] в Amplitudes of step commands текстовом поле. Это говорит Control System Tuner принять во внимание, что первый опорный сигнал в 100 раз больше, чем второй опорный сигнал.
Значение по умолчанию, No , означает, что масштабирование не применяется.
Apply goal to
Используйте эту опцию при настройке нескольких моделей сразу, таких как массив моделей, полученных путем линеаризации модели Simulink в различных рабочих точках или значениях параметров блоков. По умолчанию активные цели настройки применяются для всех моделей. Чтобы применить требование настройки для подмножества моделей в массиве, выберите Only Models. Затем введите индексы массива моделей, для которых применяется цель. Например, предположим, что вы хотите применить цель настройки ко второй, третьей и четвертой моделям в массиве моделей. Чтобы ограничить применение требования, введите 2:4 в Only Models текстовом поле.
Для получения дополнительной информации о настройке для нескольких моделей см. «Робастные подходы к настройке» (Robust Control Toolbox).
Когда вы настраиваете систему управления, программное обеспечение преобразует каждую цель настройки в нормализованное скалярное значение f (x). Здесь x является вектором свободных (настраиваемых) параметров в системе управления. Затем программа настраивает значения параметров, чтобы минимизировать f (x) или привести f (x) ниже 1, если цель настройки является жестким ограничением.
Для Step Response Goal f (x) определяется:
T (s, x) - передаточная функция с обратной связью между заданными входами и выходами, рассчитанная со значениями параметров x. Href (s) является образцом модели. erel является относительной погрешностью (см. Опции ). обозначает H 2 норму (см norm).
Эта цель настройки также накладывает неявное ограничение устойчивости на передаточную функцию с обратной связью между заданными входами и выходами, оцениваемыми с циклами, открытыми в заданных местах открытия цикла. Динамика, на которую влияет это неявное ограничение, является stabilized dynamics для этой цели настройки. Опции Minimum decay rate и Maximum natural frequency настройки управляют нижней и верхней границами на этих неявно ограниченной динамике. Если оптимизация не соответствует границам по умолчанию или если границы по умолчанию конфликтуют с другими требованиями, на вкладке Tuning используйте Tuning Options, чтобы изменить значения по умолчанию.
