Automated Driving Toolbox™ предоставляет алгоритмы и инструменты для разработки, симуляции и проверки ADAS и автономных управлений автомобилем. Вы можете проектировать и тестировать системы зрения и восприятия лидара, а также слияние датчиков, планирование пути и контроллеры транспортного средства. Инструменты визуализации включают график и возможности видимости птичьего глаза для покрытия датчика, обнаружения и дорожки, а также отображения для видео, лидара и карт. Тулбокс позволяет вам импортировать и работать с данными HERE HD Live Map и OpenDRIVE® дорожные сети.
Используя приложение Ground Truth Labeler, можно автоматизировать маркировку основная истина для обучения и оценки алгоритмов восприятия. Для проверки оборудования в цикле (HIL) и симуляции восприятия на рабочем столе, слияния датчиков, планирования пути и логики управления, можно сгенерировать и симулировать сценарии вождения. Можно симулировать камеру, радар и выход датчика лидара в фотореалистических 3D окружениях и сенсорных обнаружениях объектов и контуров маршрута в 2.5D среде симуляции.
Automated Driving Toolbox предоставляет примеру готовых узлов примеры общих функций ADAS и беспилотного вождения, включая FCW, AEB, ACC, LKA и парковочный камердинер. Тулбокс поддерживает генерацию кода C/C + + для быстрого прототипирования и программное-аппаратного тестирования с поддержкой слияния датчиков, отслеживания, планирования пути и алгоритмов регулятора транспортного средства.
Программно создайте сценарии движения по основной истине для синтетических данных датчика и алгоритмов отслеживания.
Используйте приложение Driving Scenario Designer, чтобы создать сценарий вождения и сгенерировать обнаружения датчиков и данные облака точек из сценария.
Интерактивно помечайте несколько лидаров и видеосигналов одновременно.
Создайте симуляцию монокулярного датчика камеры, способную к контурам маршрута и обнаружениям транспортного средства.
Осмыслите системы координат для автоматического вождения.
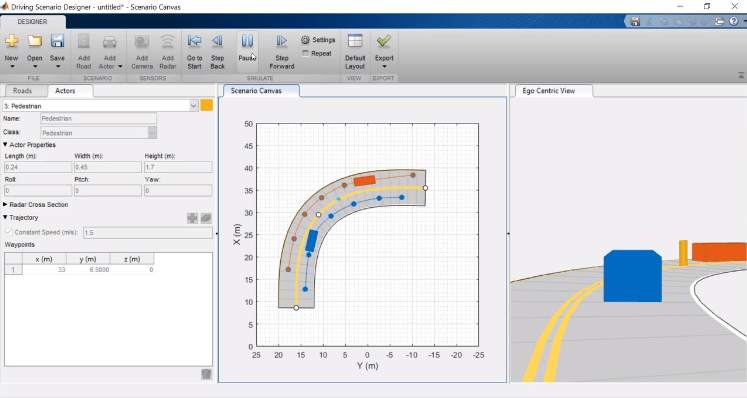
Driving Scenario Designer
Создайте виртуальные сценарии вождения и сгенерируйте синтетические данные о датчике для проверки алгоритмов восприятия.
