Интерполяция цифрового сигнала и преобразование его из основной полосы в диапазон IF
The dsp.DigitalUpConverter Система object™ интерполирует цифровой сигнал и переводит его из полосы частот основной полосы в полосу промежуточных частот (IF).
Для цифрового преобразования входного сигнала вверх:
Создайте dsp.DigitalUpConverter Объекту и установите его свойства.
Вызывайте объект с аргументами, как будто это функция.
Дополнительные сведения о работе системных объектов см. в разделе «Что такое системные объекты?».
upConv = dsp.DigitalUpConverterupConv.
upConv = dsp.DigitalUpConverter(Name,Value)Name установите заданное значение Value. Можно задать один или несколько аргументы пары "имя-значение" в любом порядке как (Name1, Value1..., NameN, ValueN). Заключайте каждое имя свойства в одинарные кавычки. Например, создайте объект, который увеличивает значение входного сигнала в 20 раз, используя фильтр с заданными качествами.
upConv = dsp.DigitalUpConverter('InterpolationFactor',20,... 'SampleRate',Fs,... 'Bandwidth',2e3,... 'StopbandAttenuation',55,... 'PassbandRipple',0.2,... 'CenterFrequency',50e3);
Чтобы использовать функцию объекта, задайте системный объект в качестве первого входного параметра. Например, чтобы освободить системные ресурсы системного объекта с именем obj, используйте следующий синтаксис:
release(obj)
Создайте object™ системы DUC, которая увеличивает 1-kHz синусоидальный сигнал в 20 раз и преобразует его вверх до 50 кГц.
Примечание.Этот пример выполняется только в R2016b или более поздней версии. Если вы используете более ранний релиз, замените каждый вызов функции на эквивалентный step синтаксис. Например, myObject(x) становится step(myObject,x).
Создайте генератор синусоиды, чтобы получить 1-kHz синусоидальный сигнал со скоростью дискретизации 6 кГц.
Fs = 6e3; % Sample rate sine = dsp.SineWave('Frequency',1000,'SampleRate',Fs,'SamplesPerFrame',1024); x = sine(); % generate signal
Создайте системный объект DUC. Используйте проекты фильтра минимального порядка и установите неравномерность в полосе пропускания равную 0,2 дБ, а затухание в полосе задерживания равное 55 дБ. Установите двустороннюю пропускную способность сигнала равной 2 кГц.
upConv = dsp.DigitalUpConverter(... 'InterpolationFactor',20,... 'SampleRate',Fs,... 'Bandwidth',2e3,... 'StopbandAttenuation',55,... 'PassbandRipple',0.2,... 'CenterFrequency',50e3);
Создайте оценку спектра, чтобы визуализировать спектр сигнала до и после преобразования вверх.
window = hamming(floor(length(x)/10)); figure; pwelch(x,window,[],[],Fs,'centered') title('Spectrum of baseband signal x')

Преобразуйте сигнал вверх и визуализируйте спектр.
xUp = upConv(x); window = hamming(floor(length(xUp)/10)); figure; pwelch(xUp,window,[],[],20*Fs,'centered') title('Spectrum of upconverted signal xUp')

Визуализируйте ответ фильтров интерполяции.
visualizeFilterStages(upConv)

Объект повышает дискретизацию входного сигнала с помощью каскада из трех интерполяционных фильтров. Этот объект преобразует восходящий сигнал путем умножения его на комплексную экпоненту с центральной частотой, равной значению в CenterFrequency свойство. В этом случае каскад фильтра состоит из этапа интерполяции конечной импульсной характеристики, второго этапа для компенсации CIC и интерполятора CIC. На блок схеме показана архитектура цифрового преобразователя частоты.
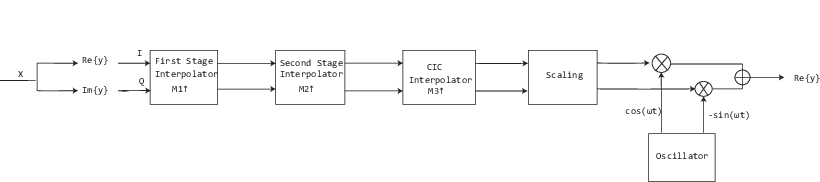
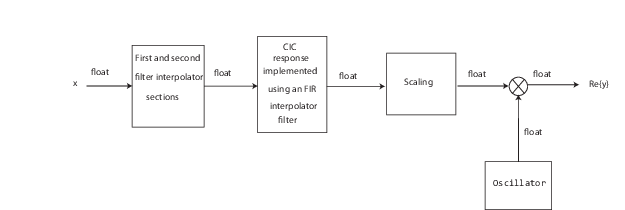
Секция масштабирования нормализует коэффициент усиления CIC и степень генератора. Он также может содержать коэффициент коррекции для достижения требуемой спецификации пульсации. В зависимости от настройки InterpolationFactor свойство, вы можете обойти первый этап фильтра. Когда входной тип данных с плавающей точкой, объект реализует фильтр интерполяции CIC N -section как КИХ фильтр с ответом, который соответствует каскаду N boxcar фильтров. CIC-фильтр эмулируется фильтром конечной импульсной характеристики, чтобы можно было запускать симуляции с данными с плавающей точкой. Когда входные данные являются типом с фиксированной точкой, объект реализует истинный CIC-фильтр с фактическими секциями гребня и интегратора .
Схема представляет арифметику DUC с входами с плавающей точкой.
Для получения дополнительной информации о операции с фиксированной точкой см. Раздел «Фиксированная точка».
Указания и ограничения по применению:
Смотрите Системные объекты в Генерации кода MATLAB (MATLAB Coder).
Этот объект также поддерживает генерацию кода SIMD с помощью технологии Intel AVX2, когда входной сигнал имеет тип данных single или double.
Технология SIMD значительно повышает эффективность сгенерированного кода.
Схема блока представляет арифметику DUC с подписанными входами с фиксированной точкой.

WL - размер слова входа, а FL - длина дроби входа.
Выходы каждого фильтра приводятся к типу данных, указанному в FiltersOutputDataType и CustomFiltersOutputDataType свойства. Приведение выходного сигнала CIC происходит после применения коэффициента масштабирования.
Выход генератора приведен к размеру слова, равной FiltersOutputDataType размер слова плюс один. Длина дроби равна FiltersOutputDataType размер слова минус один.
Масштабирование на выходе CIC интерполятора состоит из регулировок грубого усиления и мелкого усиления. Грубый коэффициент усиления достигается с помощью reinterpretcast (Fixed-Point Designer) на выходе интерполятора CIC. Точный коэффициент усиления достигается с помощью полноточного умножения.
Рисунок показывает операции грубого усиления и мелкого усиления.
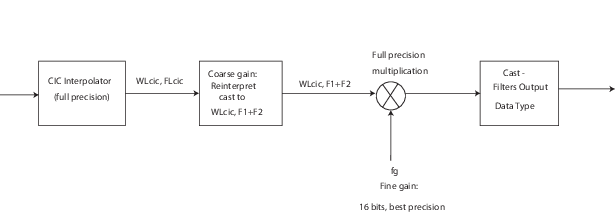
Если коэффициент усиления нормализации G (где 0<<reservedrangesplaceholder0>≦1), то:
WL cic - размер слова выходного сигнала интерполятора CIC, а FL cic - это длина дроби выходного сигнала интерполятора CIC.
F1 = abs(nextpow2(G)), указывающий часть G, достигнутой при помощи битовых сдвигов (грубый коэффициент усиления).
F2 - длина дроби, заданная FiltersOutputDataType и CustomFiltersOutputDataType свойства.
fg = fi((2^F1)*G,true,16), что указывает на то, что оставшийся коэффициент усиления не может быть достигнут с помощью битового сдвига (точный коэффициент усиления).
fvtool | generatehdl | getDecimationFactors | getFilterOrders | getFilters | groupDelay | visualizeFilterStages