Нули , полюса и усиления и преобразованием частоты полосы пропускания
[Z2,P2,K2,AllpassNum,AllpassDen]
= zpklp2bp(Z,P,K,Wo,Wt)
[Z2,P2,K2,AllpassNum,AllpassDen]
= zpklp2bp(Z,P,K,Wo,Wt) возвращает нули, Z2, полюса, P2, и коэффициент усиления, K2, целевой фильтр преобразован из реального прототипа lowpass путем применения реального lowpass второго порядка к реальному полосно-частотному отображению.
Это также возвращает числитель, AllpassNumи знаменатель AllpassDen, фильтра отображения allpass. Lowpass прототипа задается с нулями, Z, полюса, P, и коэффициент усиления, K.
Это преобразование эффективно помещает одну функцию исходного фильтра, расположенную на частоте -Wo, в необходимое целевое местоположение частоты, Wt1 и вторую функцию, первоначально на +Во, на новом месте, Wt2. Принято, что Wt2 больше Wt1. Это преобразование реализует «Мобильность постоянного тока», что означает, что функция Nyquist остается в Nyquist, но функция постоянного тока перемещается в местоположение, зависящее от выбора Wт.
Относительные положения других функций исходного фильтра не изменяются в целевом фильтре. Это означает, что можно выбрать две функции исходного фильтра, F1 и F2, со F1 предыдущими F2. F1 функций все еще будут предшествовать F2 после преобразования. Однако расстояние между F1 и F2 не будет одинаковым до и после преобразования.
Выбор функции, подлежащего преобразованию lowpass в полосу пропускания, не ограничивается только частотой отключения исходного lowpass-фильтра. В целом возможен выбор любой функции; например, ребро полосы стопора, DC, глубокий минимум в полосе стопора или другие таковые.
Реальное lowpass к полосно-пропускающему преобразованию также может использоваться для преобразования других типов фильтров; например, действительные узкополосные фильтры или резонаторы могут быть легко удвоены и расположены на двух разных, желаемых частотах.
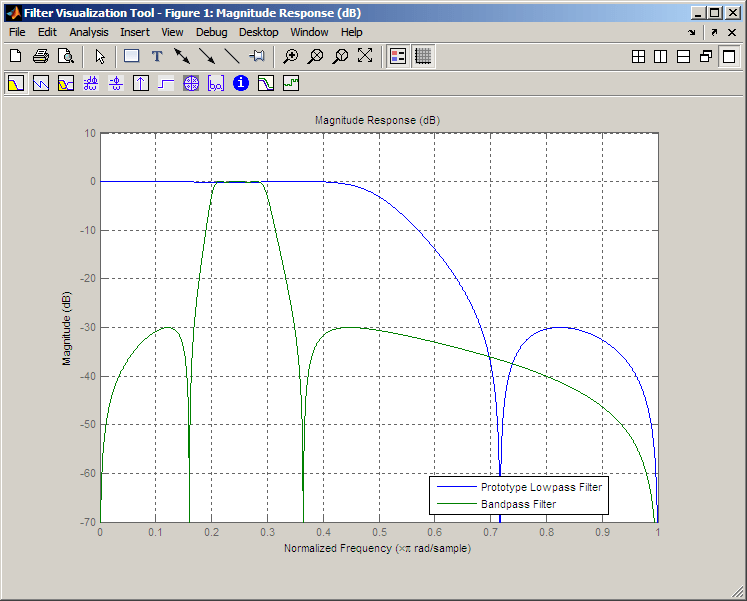
Разработайте прототип БИХ полуполосы фильтра с помощью стандартного эллиптического подхода:
[B,A] = ellip(3,0.1,30,0.409); Z = roots(B); P = roots(A); K = B(1); [Z2,P2,K2] = zpklp2bp(Z,P,K, 0.5, [0.2 0.3]); hfvt = fvtool(B,A,K2*poly(Z2),poly(P2)); legend(hfvt,'Prototype Lowpass Filter', 'Bandpass Filter'); axis([0 1 -70 10]);
| Переменная | Описание |
|---|---|
Z | Нули lowpass прототипа |
P | Полюса lowpass прототипа |
K | Коэффициент усиления lowpass прототипа |
Wo | Значение частоты, которое будет преобразовано из фильтра прототипа |
Wt | Желаемое частотное положение в преобразованном целевом фильтре |
Z2 | Нули целевого фильтра |
P2 | Полюса целевого фильтра |
K2 | Коэффициент усиления целевого фильтра |
AllpassNum | Числитель фильтра отображения |
AllpassDen | Знаменатель фильтра отображения |
Частоты должны быть нормированы, чтобы быть между 0 и 1, с 1, соответствующим половине частоты дискретизации.
Constantinides, A.G., «Spectral transformations for цифровые фильтры», IEE Proceedings, vol. 117, no. 8, pp. 1585-1590, August 1970.
Nowrouzian, B. and A.G. Constantinides, «Prototype ссылки передаточной функции параметров in the дискретного времени frequences», Proceedings 33 Middle West Symposium on Circuits and Systems, Calgary, Canada, vol. 2, pp. 1078-1082, August 1990.
Nowrouzian, B. and L.T. Bruton, «Closed-form solutions for discrete-time elliptic передаточные функции», Proceedings of the 35 Midwest Symposium on Circuits and Systems, vol. 2, pp. 784-787, 1992.
Константинид, А.Г., «Проект полосно-цифровых фильтров», IEEE® Труды, том 1, стр. 1129-1231, июнь 1969.
