Трек-ориентированное назначение отслеживания нескольких гипотез
[ возвращает таблицу назначений, assignments,unassignedrows,unassignedcolumns] = assignTOMHT(costmatrix,costThreshold)assignments, обнаружений к трекам с использованием трассирующего многогипотезного алгоритма (TOMHT).
Стоимость каждого потенциального присвоения содержится в матрице затрат, costmatrix. Каждая матричная запись представляет стоимость возможных присвоений. Строки матрицы представляют дорожки, а столбцы - обнаружения. Все возможные присвоения представлены в матрице затрат. Чем ниже стоимость, тем больше вероятность выполнения задания. Каждая дорожка может быть назначена самое большее одному обнаружению, и каждое обнаружение может быть назначено самое большее одному дорожке. Если количество строк превышает количество столбцов, некоторые дорожки не назначаются. Если количество столбцов превышает количество строк, некоторые обнаружения не назначаются. Можно задать запись costmatrix на Inf запретить назначение.
costThreshold представляет набор из трех ворот, используемых для назначения обнаружений трекам.
Функция возвращает список неназначенных треков, unassignedrows, и список неназначенных обнаружений, unassignedcolumns.
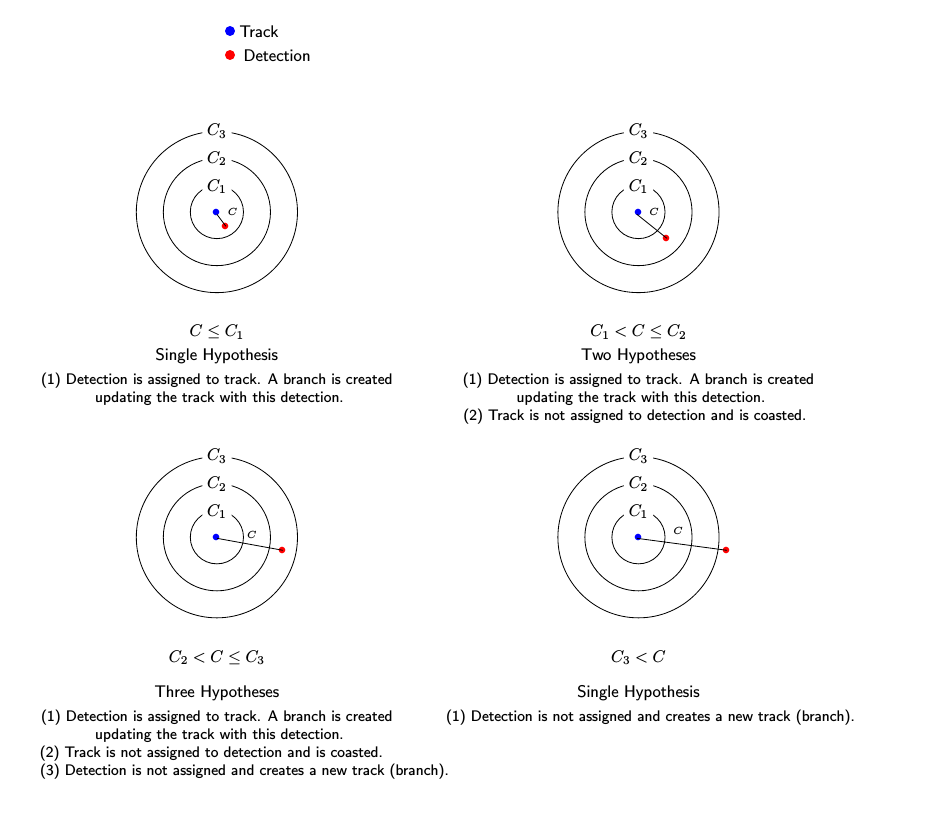
Три порога назначения, C 1, C 2 и C 3, управляют (1) присвоением обнаружения дорожке, (2) созданием новой ветви от обнаружения и (3) созданием новой ветви от неназначенной дорожки. Пороговые значения должны удовлетворить: <<reservedrangesplaceholder4> 1 <reservedrangesplaceholder3> <reservedrangesplaceholder2> 2 <reservedrangesplaceholder1> <reser vedrangesplaceholder0> 3 .
Если стоимость назначения C = costmatrix(i,j)следующие гипотезы создаются на основе сравнения стоимости со значениями порогов назначения. Ниже каждого сравнения приведен список возможных гипотез.
Совет:
Увеличьте значение C 3, если есть обнаружения, которые должны быть назначены трекам, но не являются. Уменьшите значение, если есть обнаружения, которые назначены трекам, которым они не должны быть назначены (слишком далеко).
Увеличение значений C 1 и C 2 помогает контролировать количество созданных ветвей дорожки. Однако это уменьшает количество ветвей (гипотез), которые имеет каждая дорожка.
Чтобы разрешить назначение каждой дорожки, установите C 1 = 0.
Чтобы позволить каждое обнаружение не назначаться, установите C 2 = 0.
[1] Werthmann, John R. «Пошаговое описание вычислительно эффективной версии отслеживания нескольких гипотез». В Signal and Data Processing of Small Targets 1992, vol. 1698, pp. 288-300. Международное общество оптики и фотоники, 1992 год.
