Система отслеживания нескольких датчиков может обеспечить лучшую эффективность, чем система с одним датчиком, потому что она может обеспечить более широкое покрытие и лучшую видимость. Кроме того, обнаружение запала с различных типов датчиков может также улучшить качество и точность целевых оценок. Два типа архитектуры обычно используются в системе отслеживания нескольких датчиков. В первом типе архитектуры - отслеживании центрального уровня - обнаружения со всех датчиков отправляются непосредственно в систему слежения, которая поддерживает дорожки на основе всех обнаружений. Теоретически архитектура отслеживания центрального уровня может достичь наилучшей эффективности, поскольку она может полностью использовать всю информацию, содержащуюся в обнаружениях. Однако можно также применить иерархическую структуру с отслеживанием уровня датчика в сочетании с слиянием уровня дорожки для системы с несколькими датчиками. Рисунок показывает типовую систему отслеживания центрального уровня и типовую систему слияния трек-трек, основанную на отслеживании уровня датчика и слиянии трек-уровня.
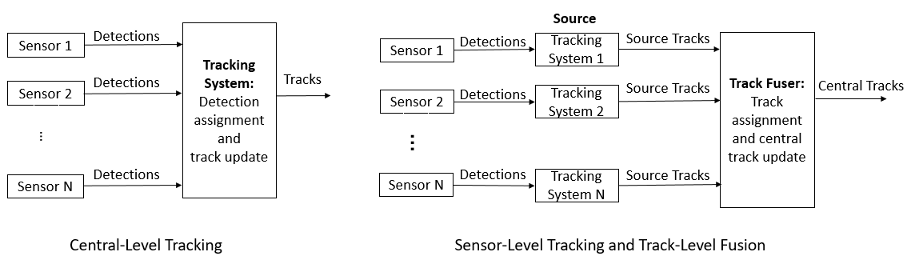
Чтобы представлять каждый элемент в системе слияния треков в трек-трек, вызывайте системы отслеживания, которые выводят треки в fuser в качестве источников, и вызывайте выходные треки из источников в качестве исходных треков или локальных треков. Вызовите дорожки, поддерживаемые в фузере, как центральные дорожки.
В некоторых случаях архитектура слияния трек-в-треке может быть предпочтительнее архитектуры отслеживания центрального уровня. Эти случаи включают:
Во многих приложениях система слежения не только должна отслеживать цели в своём окружении для самонавигации, но и должна передавать свои поддерживаемые пути в окружающие системы слежения для повышения общей эффективности. Например, автономное транспортное средство, которое отслеживает своё собственное ситуационное окружение, может также совместно использовать поддерживаемые пути с другими транспортными средствами, чтобы облегчить их навигацию.
На практике многие датчики непосредственно выводят дорожки вместо обнаружений. Поэтому, чтобы объединить информацию от датчиков, которые выводят дорожки, требуется слияние уровня дорожки.
Когда ширина полосы связи ограничена, передача списка дорожек часто более эффективна, чем передача набора обнаружений. Это может быть особенно важно для случаев, когда список дорожек предоставляется с пониженной скоростью относительно скорости скана.
Когда количество датчиков и обнаружений велико, сложность расчетов для централизованной системы слежения может быть высокой, особенно для назначения обнаружения. Архитектура слияния трек/трек может распределить некоторые рабочие нагрузки назначения и оценки для отслеживания уровня датчика, что уменьшает сложность расчетов фузера.
Несмотря на все преимущества в пользу архитектуры слияния треков и треков, это также создает дополнительную сложность и проблемы для системы слежения. В отличие от обнаружений, которые могут быть приняты как условно независимые, оценки дорожек от каждого источника коррелируют друг с другом, потому что они имеют общую ошибку предсказания, возникающую из-за общей модели процесса. Поэтому вычисление сросшейся дорожки с помощью стандартного подхода фильтрации может привести к неправильным результатам. Необходимо учитывать следующие эффекты:
Общий шум процесса - поскольку датчики наблюдают и отслеживают одну и ту же цель, они имеют некоторую общую динамику. В результате маневрирование цели может привести к средней ошибке, которая является общей для всех датчиков.
Коррелированный по времени шум измерения - если слияние дорожек повторяется с течением времени, то стандартный фильтр Калмана предполагает, что измерения не коррелируются с течением времени, нарушается, потому что ошибки расчета состояния дорожки уровня датчика коррелируются с течением времени.
Можно использовать trackFuser в Sensor Fusion and Tracking Toolbox™ для целей слияния трек-трек. The trackFuser System object™ предоставляет два алгоритма для объединения исходных треков с учетом эффектов коррекции между различными треками. Вы можете выбрать алгоритм, задав StateFusion свойство trackFuser как:
'Cross' - Использует алгоритм кросс-ковариационного слияния.
'Intersection' - Использует ковариацию пересечений.
Можно также настроить свой собственный алгоритм слияния.
Кроме стандартной архитектуры слияния track-to-track, показанной на предыдущем рисунке, можно также использовать другие типы архитектур с trackFuser. Для примера следующий рисунок иллюстрирует систему слежения за двумя транспортными средствами.
На каждом транспортном средстве два датчика отслеживают близлежащие цели со связанными трекерами. В каждом транспортном средстве также есть фузер, который запирает исходные треки с двух трекеров. Fuser 6 может передавать свои поддерживаемые центральные дорожки к Fuser 3. С помощью этой архитектуры Транспортное средство 1, возможно, может идентифицировать цели (Цель 2 на рисунке), которые не находятся в поле зрения ее собственных датчиков.
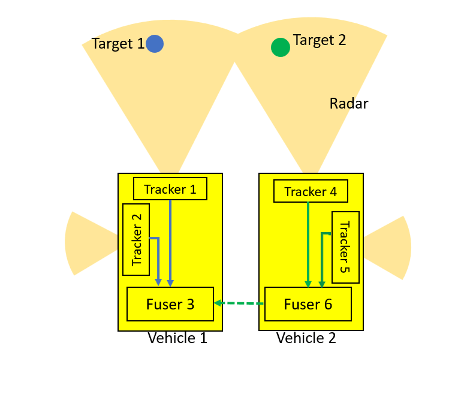
Чтобы уменьшить распространение слухов, можно считать исходные дорожки от Fuser 6 до Fuser 3 внешними, задав IsInternalSource свойство fuserSourceConfiguration как false при настройке SourceConfigurations свойство TrackFuser.
Поскольку треки, сообщаемые различными трекерами, могут быть выражены в разных координатных системах координат, необходимо задать преобразование координат между источником и фузером путем определения fuserSourceConfiguration свойство.
fuserSourceConfiguration | trackerGNN | trackerJPDA | trackerPHD | trackerTOMHT | trackFuser
[1] Chong, C. Y., S. Mori, W. H. Barker и K. C. Chang. «Архитектуры и алгоритмы объединения треков и слияния». IEEE Aerospace and Electronic Systems Magazine, том 15, № 1, 2000, стр. 5 - 13.
