Мультисенсорный, многообъектный PHD-трекер
The trackerPHD Системный object™ является трекером, способным обрабатывать обнаружения нескольких целей с нескольких датчиков. Трекер использует фильтр плотности гипотезы множественных целевых вероятностей (PHD), чтобы оценить состояния точечных целей и расширенных объектов. PHD является функцией, заданной над пространством состояний системы слежения, и ее значение в состоянии определяется как ожидаемое количество целей на модуль объема пространства состояний. PHD представлен взвешенным суммированием (смесью) функций плотности вероятностей, а пики в PHD соответствуют возможным целям. Обзор функций трекера см. в разделе Алгоритмы.
По умолчанию в trackerPHD может отслеживать расширенные объекты, используя ggiwphd фильтр, который моделирует обнаружения от расширенного объекта как облако точек анализа. Можно также использовать trackerPHD с gmphd фильтры, которые отслеживают целевые точки и расширенные объекты с назначенными формами. Входами к трекеру являются отчеты об обнаружении, сгенерированные objectDetection, fusionRadarSensor, irSensor, или sonarSensor объекты. Трекер выводит все поддерживаемые дорожки и их аналитическую информацию.
Чтобы отслеживать цели, использующие этот объект:
Создайте trackerPHD Объекту и установите его свойства.
Вызывайте объект с аргументами, как будто это функция.
Дополнительные сведения о работе системных объектов см. в разделе «Что такое системные объекты?».
tracker = trackerPHDtrackerPHD Системный объект со значениями свойств по умолчанию.
tracker = trackerPHD(Name,Value)trackerPHD('MaxNumTracks',100) создает PHD-трекер, который позволяет использовать не более 100 треков. Заключайте каждое имя свойства в кавычки.
Для обработки обнаружений и обновления треков вызовите трекер с аргументами, как если бы это была функция (описанная здесь).
confirmedTracks = tracker(detections,time)detections, во время обновления, time. Подтвержденные дорожки корректируются и прогнозируются до времени обновления.
confirmedTracks = tracker(detections,config,time)config. Используйте этот синтаксис, когда строения датчиков изменяются со временем. Чтобы включить этот синтаксис, установите HasSensorConfigurationsInput свойство к true.
[ также возвращает список предварительных треков, confirmedTracks,tentativeTracks,allTracks] = tracker(___)tentativeTracksи список всех треков, allTracks. Можно использовать этот синтаксис выхода с любым из предыдущих синтаксисов входа.
[ также возвращает информацию анализа, confirmedTracks,tentativeTracks,allTracks,analysisInformation] = tracker(___)analysisInformation, который может использоваться для анализа дорожек. Можно использовать этот синтаксис выхода с любым из предыдущих синтаксисов входа.
Чтобы использовать функцию объекта, задайте системный объект в качестве первого входного параметра. Например, чтобы освободить системные ресурсы системного объекта с именем obj, используйте следующий синтаксис:
release(obj)
Настройте строение датчика, создайте PHD-трекер и подайте трекер с обнаружениями.
% Create sensor configuration. Specify clutter density of the sensor and % set the IsValidTime property to true. configuration = trackingSensorConfiguration(1); configuration.ClutterDensity = 1e-7; configuration.IsValidTime = true; % Create a PHD tracker. tracker = trackerPHD('SensorConfigurations',configuration); % Create detections near points [5;-5;0] and [-5;5;0] at t=0, and % update the tracker with these detections. detections = cell(20,1); for i = 1:10 detections{i} = objectDetection(0,[5;-5;0] + 0.2*randn(3,1)); end for j = 11:20 detections{j} = objectDetection(0,[-5;5;0] + 0.2*randn(3,1)); end tracker(detections,0);
Обновите трекер снова через 0,1 секунд путем принятия того, что цели движутся с постоянной скоростью [1; 2; 0] модуль в секунду.
dT = 0.1;
for i = 1:20
detections{i}.Time = detections{i}.Time + dT;
detections{i}.Measurement = detections{i}.Measurement + [1;2;0]*dT;
end
[confTracks,tentTracks,allTracks] = tracker(detections,dT);Визуализация обнаружений и подтвержденных дорожек.
% Obtain measurements from detections. d = [detections{:}]; measurements = [d.Measurement]; % Extract positions of confirmed tracking using getTrackPositions function. % Note that we used the default sensor configuration % FilterInitializationFcn, initcvggiwphd, which uses a constant velocity % model and defines the states as [x;vx;y;vy;z;vy]. positionSelector = [1 0 0 0 0 0;0 0 1 0 0 0;0 0 0 0 1 0]; positions = getTrackPositions(confTracks,positionSelector); figure() plot(measurements(1,:),measurements(2,:),'x','MarkerSize',5,'MarkerEdgeColor','b'); hold on; plot(positions(1,1),positions(1,2),'v','MarkerSize',5,'MarkerEdgeColor','r' ); hold on; plot(positions(2,1),positions(2,2),'^','MarkerSize',5,'MarkerEdgeColor','r' ); legend('Detections','Track 1','Track 2') xlabel('x') ylabel('y')
![]()
Плотность гипотезы вероятностей (PHD) является функцией, заданной в пространстве состояний системы слежения, и ее значение в состоянии определяется как ожидаемое количество целей на модуль объема пространства состояний. PHD обычно аппроксимируется смесью компонентов, и каждый компонент соответствует оценке состояния. Обычно используемыми приближениями PHD являются смесь Гауссова, смесь SMC, смесь GGIW и смесь GIW.
Чтобы понять PHD, возьмите Гауссову смесь как пример. Гауссова смесь может быть представлена
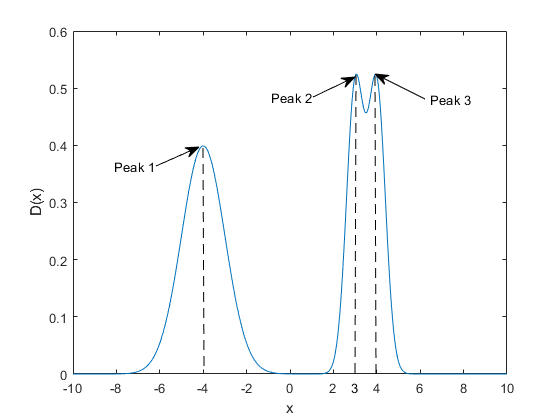
где M - общее количество компонентов, N (x | m i, P i) является нормальным распределением со средним m i и ковариационным P i, и w i - вес i-го компонента. Вес w i обозначает число, которое может быть дробным, целей, представленных i-м компонентом. Интегрирование D (x) в пространственно-пространственную область приводит к ожидаемому количеству целей в этой области. Интегрирование D (x) по всему пространству состояний приводит к общему ожидаемому числу целей (∑ w i), поскольку интегрирование нормального распределения по всему пространству состояний равняется 1. x -координаты peaks (локальные максимумы) D (x) представляют наиболее вероятные состояния целей.
Например, следующий рисунок иллюстрирует функцию PHD, заданную D (x) = N (x | − 4,2) + 0,5 N (x | 3,0,4) + 0,5 N (x | 4,0,4). Массовое суммирование этих компонентов составляет 2, что означает, что, вероятно, существуют две цели. Из peaks D (x) возможные положения этих целей на x = − 4, x = 3 и x = 4. Заметьте, что последние два компонента очень близки друг к другу, что означает, что эти два компонента могут быть приписаны одному объекту.
[1] Granstorm, K., C. Lundquiest, and O. Orguner. Расширенное отслеживание цели с использованием PHD-фильтра Гауссовой смеси. Транзакции IEEE по аэрокосмическим и электронным системам. Том 48, № 4, 2012, стр. 3268-3286.
[2] Granstorm, K., and O. Orguner ". PHD-фильтр для слежения за несколькими расширенными целями с помощью случайных матриц ". Транзакции IEEE по обработке сигналов. Том 60, № 11, 2012, стр. 5657-5671.
[3] Granstorm, K., and A. Natale, P. Braca, G. Ludeno, and F. Serafino. «Гамма Гауссов обратный Wishart гипотезы вероятности плотности для расширенного отслеживания цели с использованием морских радиолокационных данных X-диапазона». Транзакции IEEE по геологии и дистанционному зондированию. Том 53, № 12, 2015, стр. 6617-6631.
