Выберите Estimate > State Space Models.
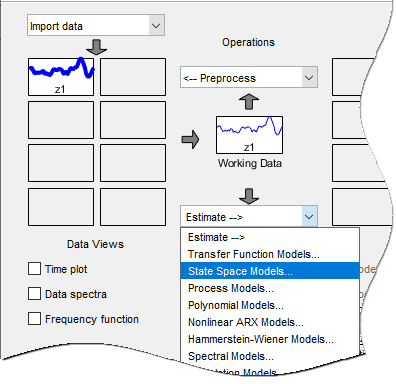
Откроется диалоговое окно Модели пространства состояний (State Space Models).
Совет
Для получения дополнительной информации об опциях в диалоговом окне нажмите кнопку Help.
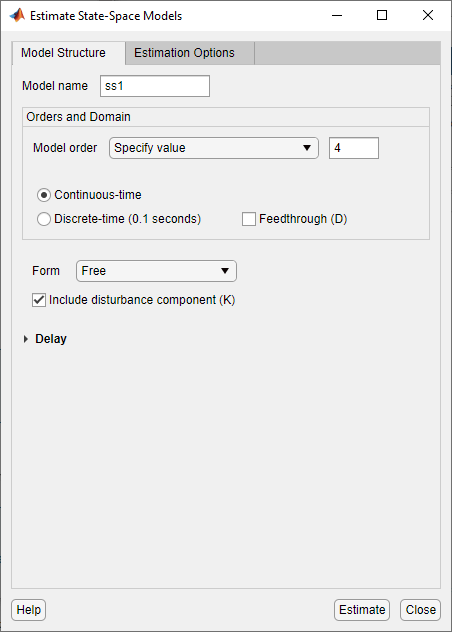
Model name отображает имя модели по умолчанию. Чтобы изменить имя, введите новое имя. Имя модели должно быть уникальным в модели платы.
Выберите опцию Specify value (если она еще не выбрана) и укажите порядок модели в поле редактирования. Порядок модели относится к количеству состояний в модели пространства состояний.
Совет
Когда вы не знаете порядок модели, ищите и выберите заказ. Для получения дополнительной информации смотрите Оценка модели с выбранным порядком в Приложении.
Выберите Continuous-time или Discrete-time опцию, чтобы задать тип модели для оценки.
Вы не можете оценить модель в дискретном времени, если рабочие данные являются данными частотного частотного диапазона в непрерывном времени.
Задайте элементы, которые будут включены в структуру модели, включая сквозное соединение (D матрица) и компонент нарушения порядка (K матрица). Задайте форму модели, такую как каноническая форма, путем выбора из опций в Form. Чтобы задать задержки, разверните раздел Delay.
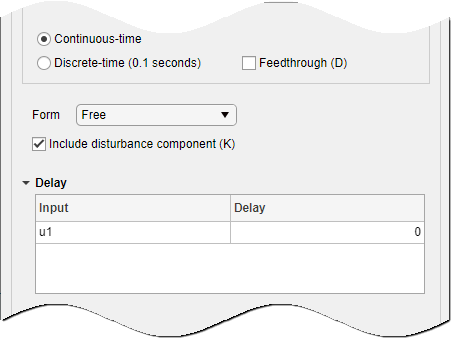
Для получения дополнительной информации о типе параметризации пространства состояний смотрите Поддерживаемые параметризации пространства состояний.
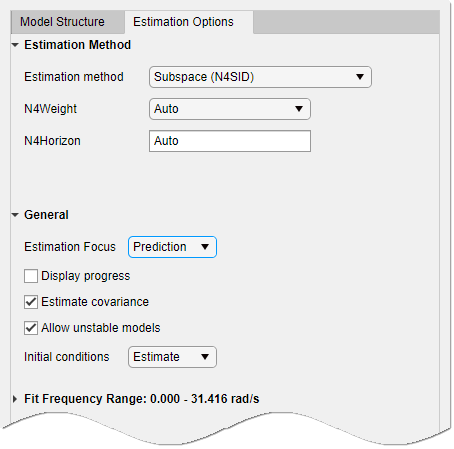
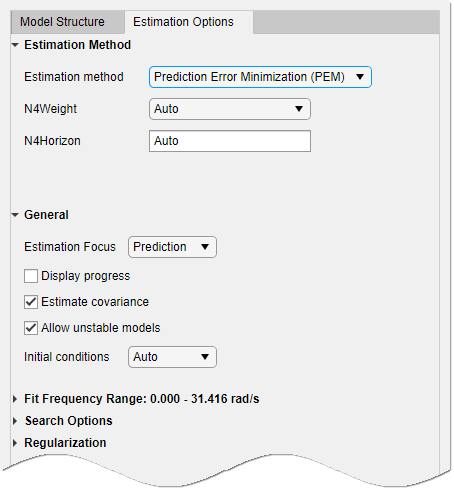
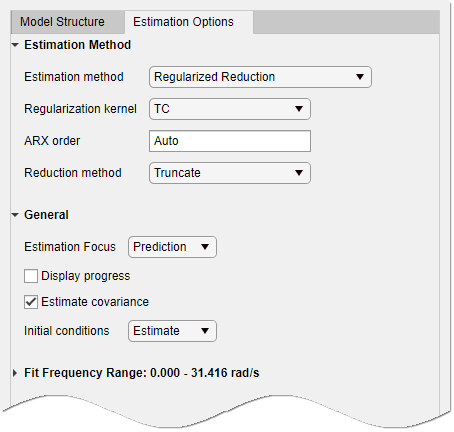
Выберите вкладку Estimation Options, чтобы выбрать метод оценки и сконфигурировать функцию затрат.
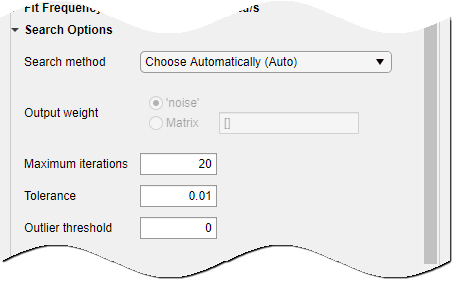
Выберите один из методов в Estimation method и сконфигурируйте опции. Для получения дополнительной информации об этих методах см. «Методы оценки модели пространства состояний».
Щелкните Estimate, чтобы оценить модель. Новая модель добавляется в приложение Системы идентификации.
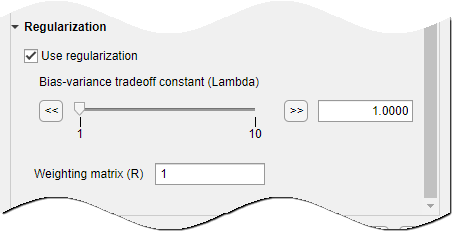
Можно задать как то, как алгоритм оценки взвешивает подгонку на различных частотах, так и то, какая частотная область значений использует приложение. В приложении установите Estimation Focus один из следующих опций:
Prediction - Использует отношение входного спектра, U к обратной модели шума, H взвешивает относительную важность данных во всей частотной области значений. Это взвешивание соответствует минимизации одноэтапного предсказания, которое обычно благоприятствует подгонке на коротком временном интервале. Оптимизировано для приложений выходного предсказания.
Simulation - Использует только входной спектр, а не модель шума, для взвешивания. Оптимизировано для выходов симуляции.
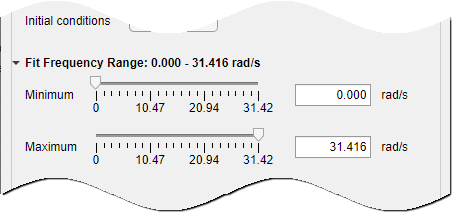
Можно применить полосу пропускания, чтобы ограничить частотную область значений, в котором алгоритм оценки выполняет подгонку.
Для получения дополнительной информации о взвешивании оценки смотрите раздел Эффекты Focus и WeightingFilter Опции в функции потерь и метриках качества модели.